I recently built my first quadrotor drone using a tarot 650 sport frame. The flight controller is an mrobotics x2.1. The drone seems to fly reasonably well, but I noticed I was getting some VIBE alerts in the hud on mission planner. I was hoping someone more experienced than me could chime in and let me know if I should be worried.
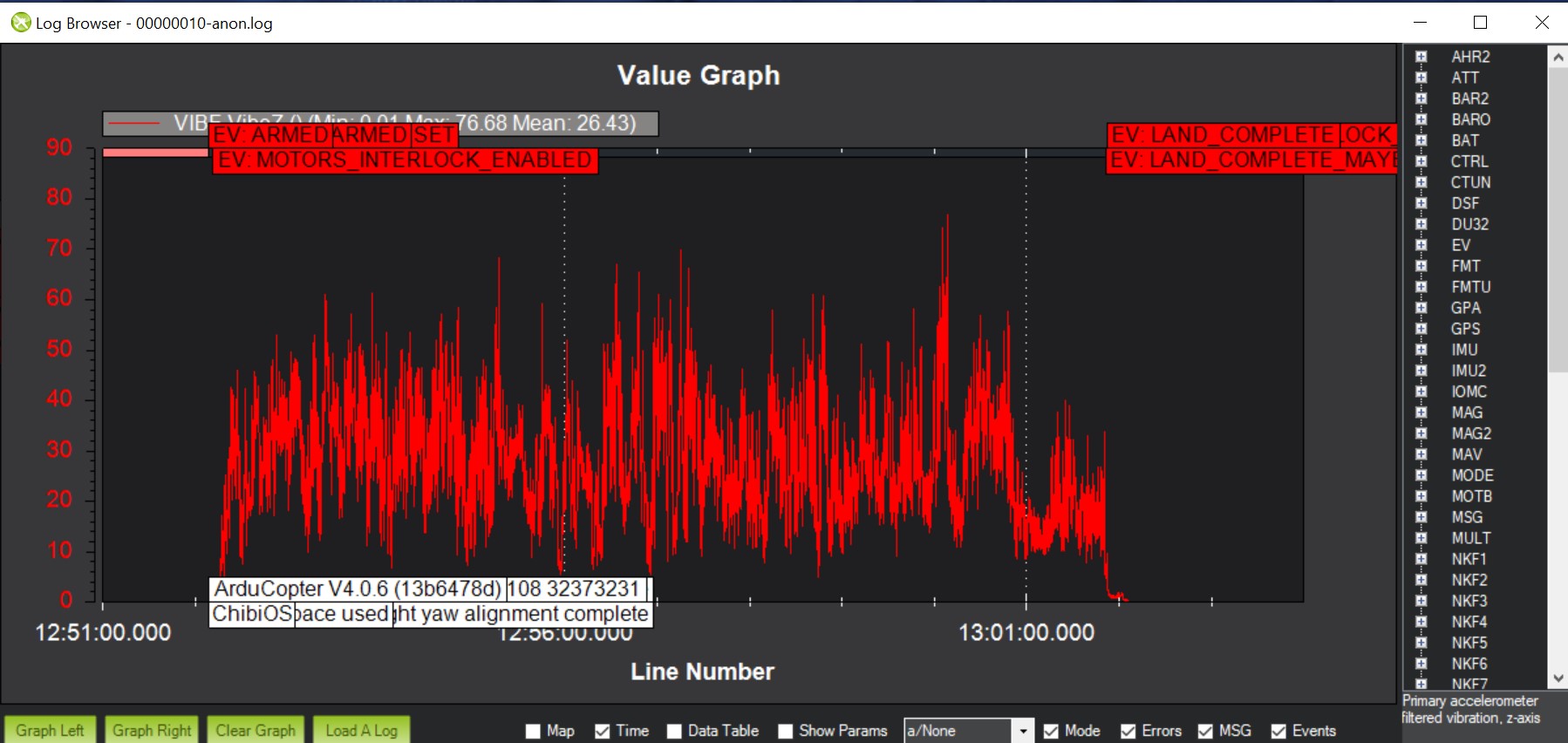
The Z vibrations seems to be the worse, consistently above 30 m/s/s
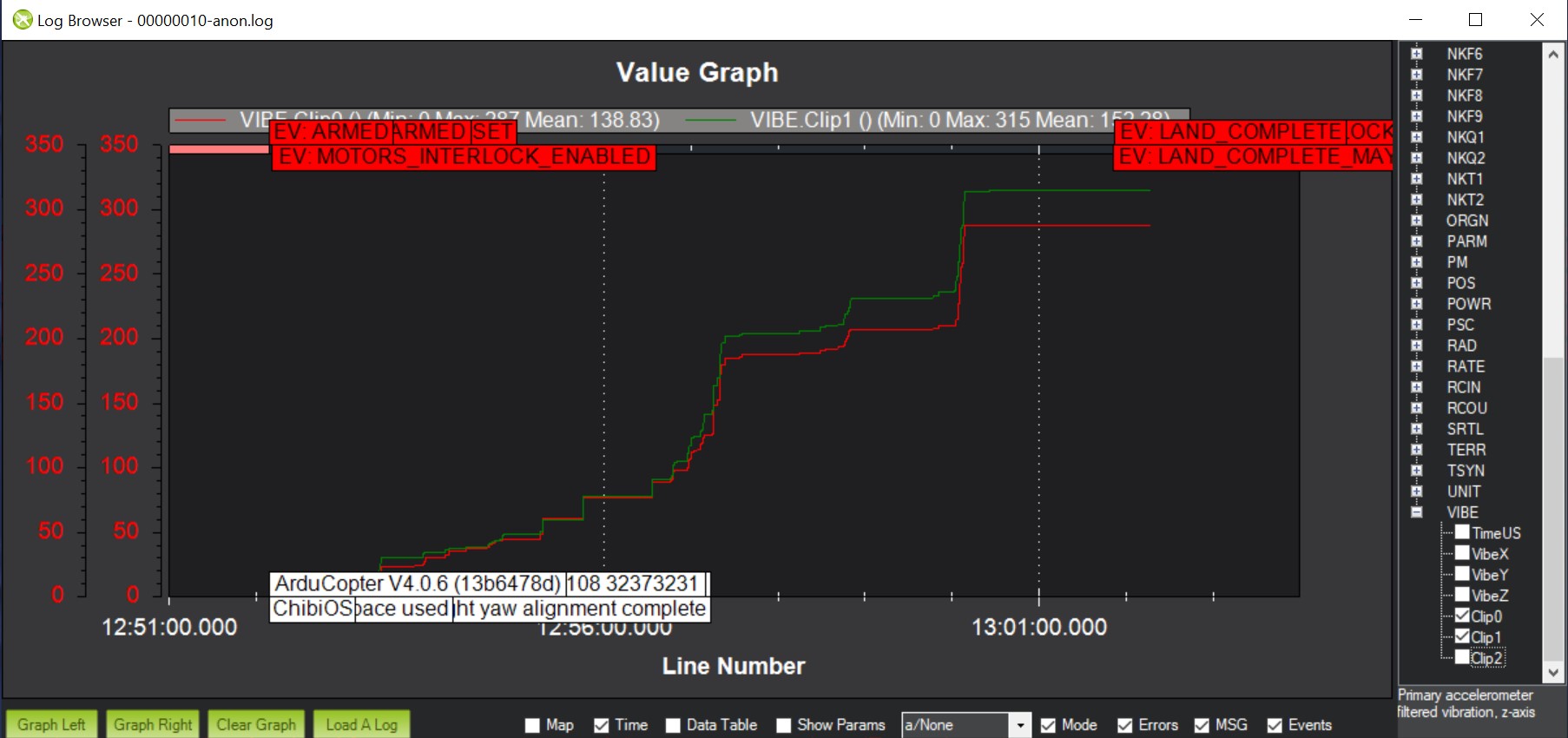
You should be very concerned. Usually about 12 is the maximum I would allow. It can affect your speed and position control if you have them.I have seen crashes because the accelerometers fused with the barometers affects the altitude estimation.
just a quick update… I just added some mass to the vibration-isolated plate that the FC is mounted to, and it cut the vibrations significantly… all axes below 10 m/s/s and no clipping at all.
actually that’s the first thing I tried after posting this. Just directly attached the flight controller with double sided tape, but it didn’t improve the situation.
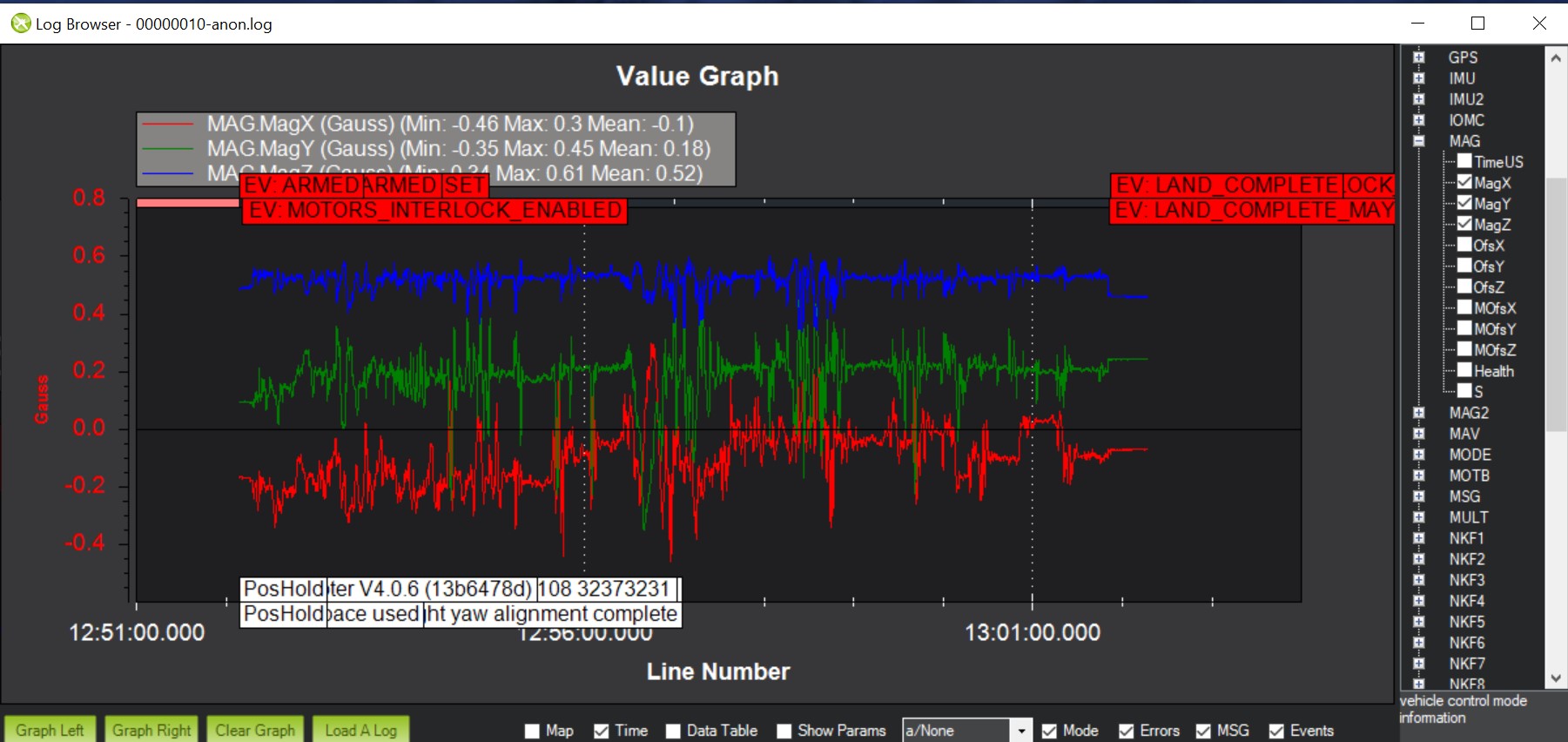
Check the spindle for free play on your motors, this gave me high z vibrations but x and y were fairly low. Also any loose wires near the flight controller
That is a larger MR, 880mm and you can see how the arms are less rigid causing the z vibration to be sort of amplified. I’d imagine it would be similar on your 650 tho its probably built more rugged than mine (I stretched mine). Could possibly be props also, I’ve had some that were balanced but due to their cheap construction did not pass through the air smoothly and the turbulence added to the vibrations. I noticed this just holding the copter to the wind and the props spinning from just the wind
The fix was to use a press to push the spindle assembly together better.
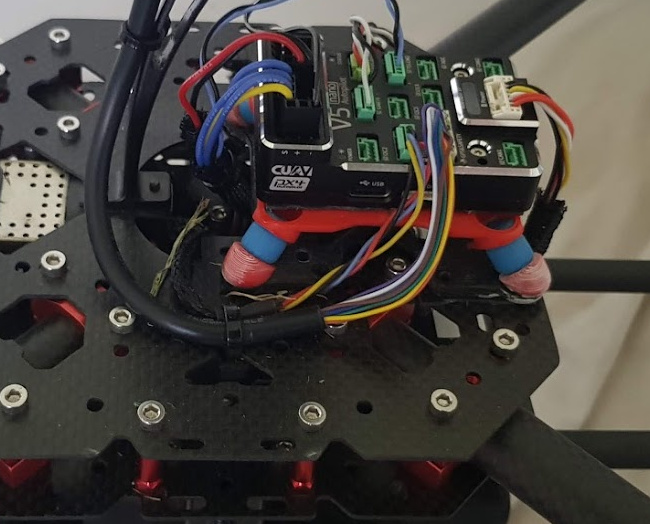
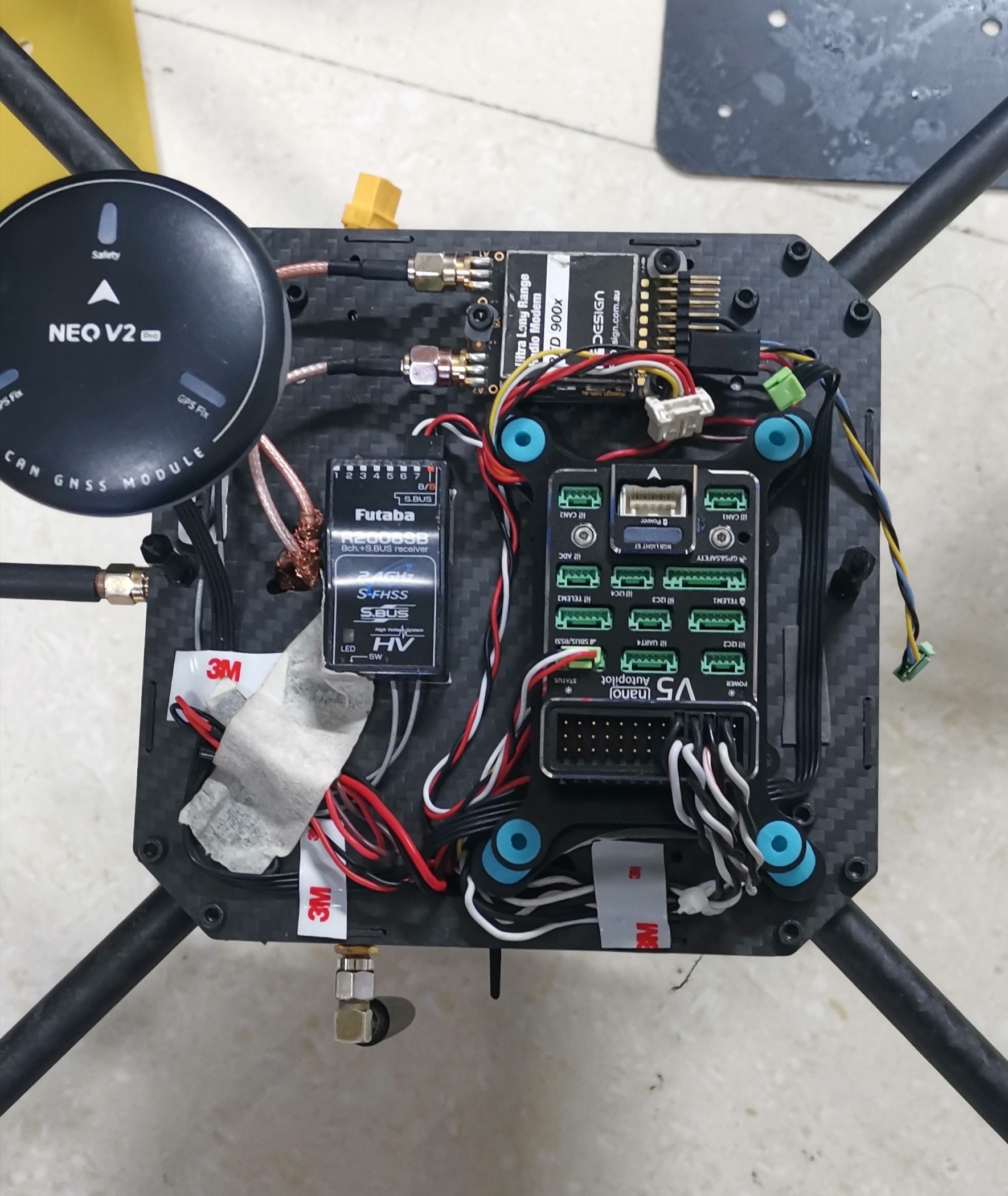
We found the V5 Nano worked well on the old “4 balls” APM style antivibration mount. We had to cut some length out of the center of one we already had, but it wouldnt be hard to 3D print a new one the correct length. Width was fine.
Use one with the angled antivibration dampers, something like this
Thank you @xfacta i have followed you tips on antivibration and improved on vibe and there no clipping at all & vibe always below 15m/s/s/s in all axis. but still suffering with wind.
if slight wing also affect the stability look very unstable. i have followed initial parameter also using Alt+A and set Harmonic notch also …but no luck.
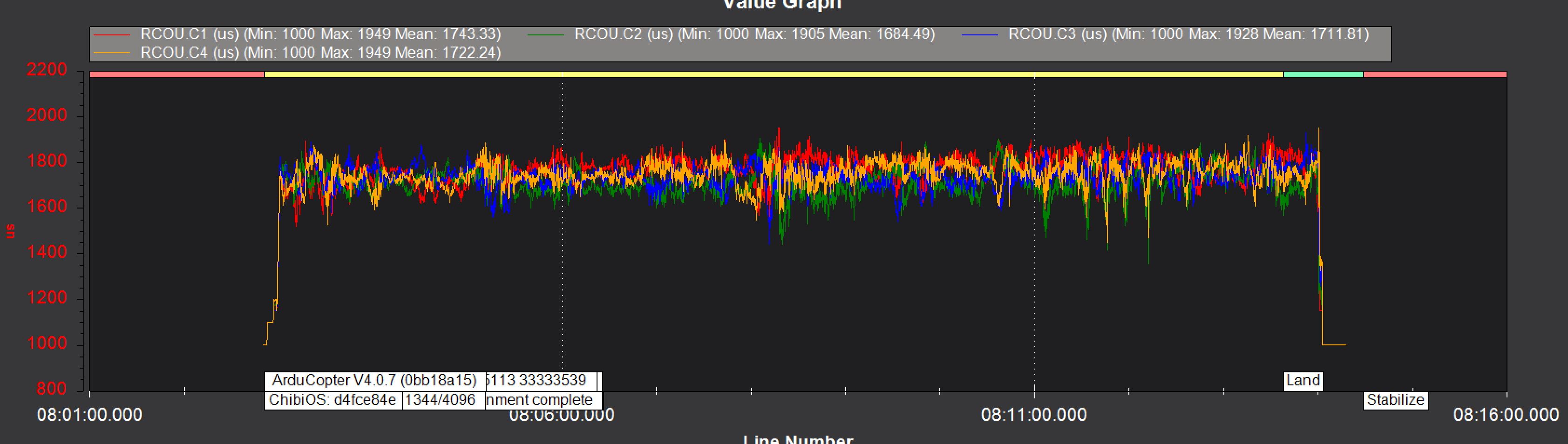
below log is after configured Harmonic Notch filter
Your thrust/weight is too low which will cause problems for stability during command demands. Average commanded output at Hover ~1715us. The tune is poor but when it’s improved you will still have this problem.