This is my first post on the Ardupilot forum and English is not my native language. So please don’t judge me to hard. I am in to RC flying for over 20 years, fixed wing and I have only recently (2 years ago) bought a drone as I would like to learn about autonomous flight. My dream is to do some RC glider towing/ huckepack where the towing/ carrying plane is controlled by a flight controller.
The hexacopter which I have build in the meantime is flying good even when I am not an expert in tuning and setup.
For this specific issue, I am trying to help my father upgrading a quadcopter (F450) style. I am aware that this airframe is quite weak but the craft was flying before with a Naza-M lite. In favour of more options we have decided to upgrade to Ardupilot on a Pixhawk 2.4.8 clone. As far as I know we did all the necessary setup including the “Alt-A” calculator in MP. (Although, I think that I missed the RC calibration on the latest attempt.)
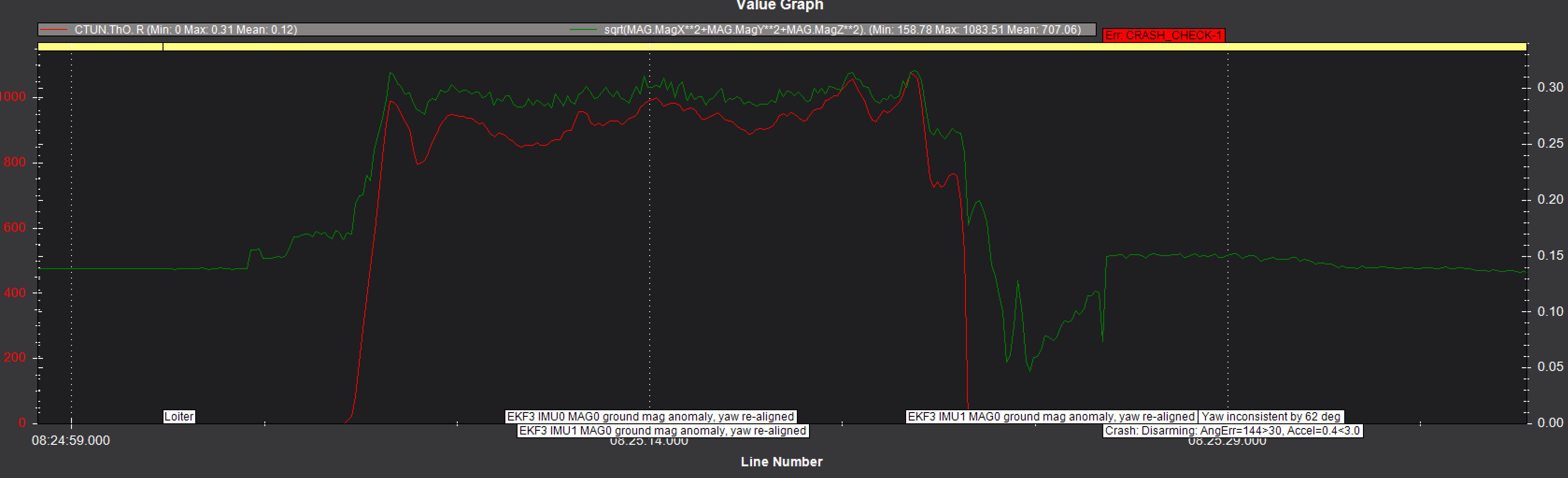
The craft has 3d fix and we disabled the external compass as we were unable to calibrate that compass. Arming via right rudder was no problem and also take-off was uneventful but after a few seconds of hover in Loiter mode the copter got unstable, crash landed and turned on its back. Fortunately, without major damage.
In the log I noticed that Att.DesRoll and Att.Roll are not aligned. But I can’t figure out why. Vibes are a bit high but no clipping visible in the log.
At the moment of writing I do only have some generic data about this copter as it is more than 600 kilometres away:
F450 style frame
4 in 1 esc without BLHeli firmware
3s 5000mAh Lipo battery
Props 9x4.5
Pixhawk 2.4.8 clone with Neo M8N GPS/ Compass
Both V4.07 and the V4.1 Beta software have been tried
I think you’ll have to do something more about the Z axis vibrations, it’s not the worst but in that grey zone of things can go either way.
Also the baro appears to be affected by prop wash, and the prop wash over the flight controller could even be related to the Z axis vibrations. I would pull apart the pixhawk case and check there’s sufficient open-cell foam over the baro. There’s usually a little walled off area in the case where the foam is meant to be captive.
Maybe even cover the whole pixhawk with an upside-down tuperware container or take-away food bowl to keep off the prop wash and resulting vibrations. You would need a slot cut out for the GPS mast, or something similar.
Try these to see if it improves the GPS quality a bit. This will make you wait on the ground for a good 3D fix whether you like it or not, but you soon get used to that, and it’s safest anyway.
GPS_GNSS_MODE,65
FENCE_ENABLE,1
FENCE_TYPE,3
And definitely set these:
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
Set these before the next test flight and we’ll be able to set up the Harmonic Notch filter easily:
INS_LOG_BAT_MASK,1
INS_HNTCH_ENABLE,1
You should be able to try these "PID"s too, as a starting point:
ATC_ANG_PIT_P,10
ATC_ANG_RLL_P,10
ATC_ANG_YAW_P,6
ATC_RAT_RLL_P,0.11
ATC_RAT_RLL_I,0.11
ATC_RAT_RLL_D,0.006
ATC_RAT_PIT_P,0.11
ATC_RAT_PIT_I,0.11
ATC_RAT_PIT_D,0.006
Just hover for a minute to check for oscillations and then land and check for hot motors. If it’s all OK hover and do some gentle movements in AltHold mode, then let’s see that .bin log.
Here’s a long discussion on a similar build. Note that there was also barometer problems with the cheap 2.4.8 clone, and Greg switched to using an older Pixhawk 1.
Hi, sir flight moods are not working in my drone .
I’m using pixhawk flight controller and GPS/compass M8N but its not working sir ,
So please tell me what should I do now
You should read the related Wiki’s for the questions you have 1st. Try to figure it out for yourself and then if you have questions post them. For example, Google “Arducopter logs”, read the Wiki, download the log from the Flight Controller, Save it to a Cloud service (dropbox, etc) and post a link to it.