Hello,
I got problem with my quadcopter and writing here to 3.6 section but I guess it is not related only to this version. I flew with this configuration many times without problems but after some upgrades (guess the problems started with 3.6.7) the copter started yawing without rc-input or another symptom was it didn’t yaw at all even with full left/right rc-lever.
Situation:
Arducopter with fresh loaded (all params reset to defaults) 3.6.10 running on RBPi 3 + PXFMini on it.
On the field I just did Compass callibration and motor/compass calibration.
Then I tookoff in stabilize mode, but right after copter elevated bit above ground it started yawing notable in CW direction. And because yaw couldn’t be corrected with my radio I only landed somehow with little damages on the frame.
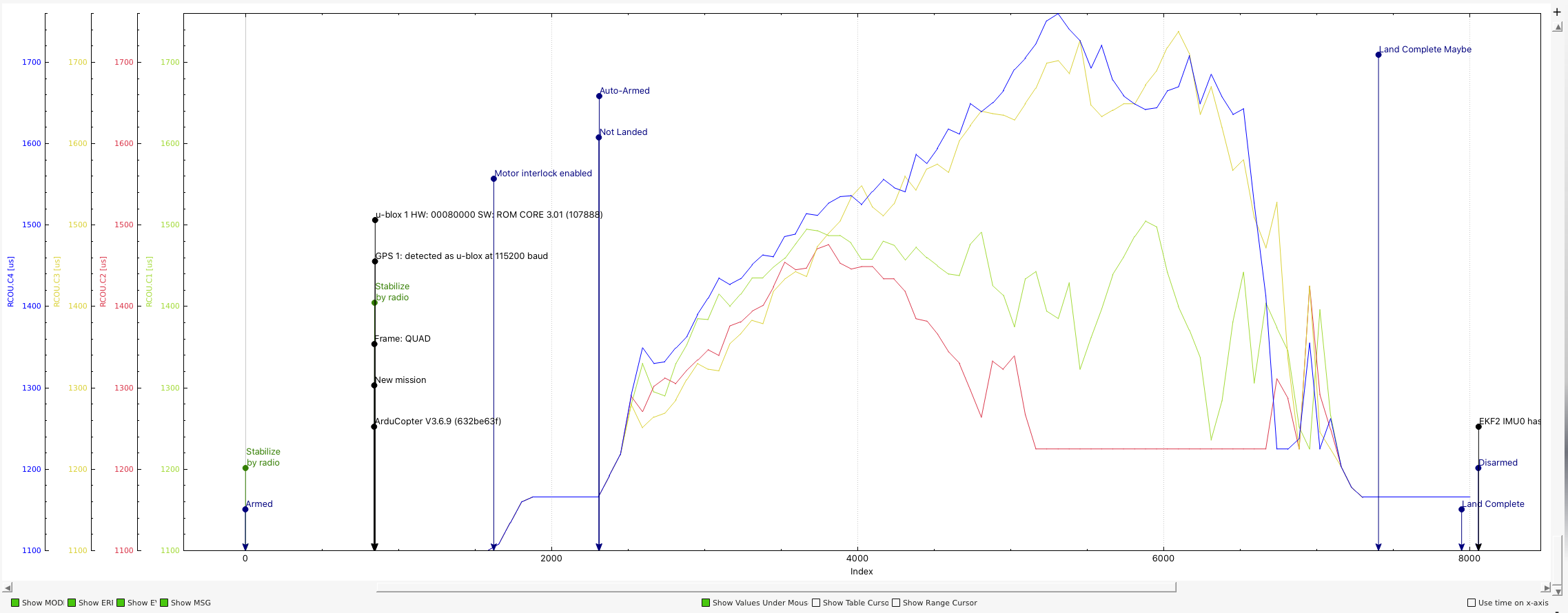
So I downloaded the log but only thing I could read from it is the channel 4 out was not corresponding to my rc-input (RCIN-4). In fact it didn’t react to my rc-input 4 at all.
One can see it on the graph here:
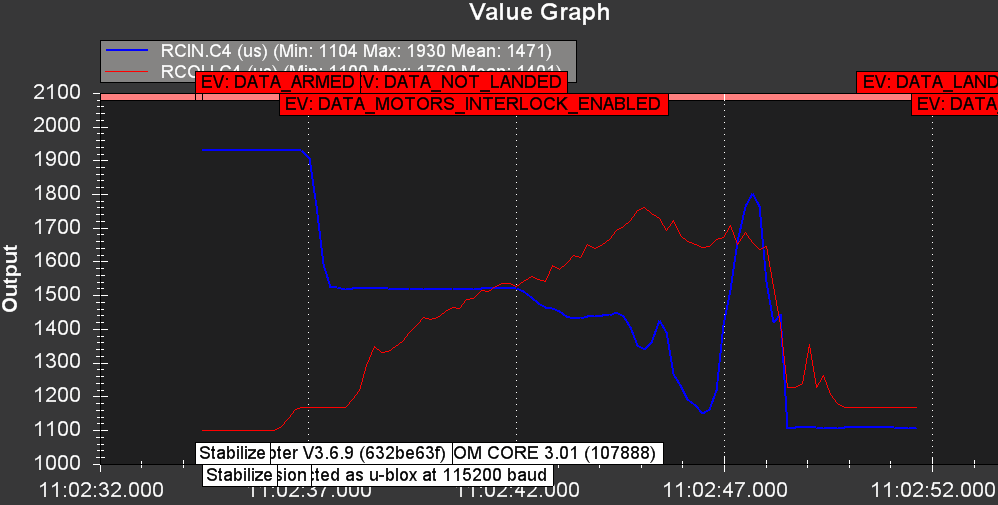
Where the blue curve is my rc-4 input (at the begin very high - as I armed the copter with yaw lever) and then after approx. in the intersection of red and blue lines I started with correction - opposite to yawing, but the red line is still rising up and I really don’t understand what’s wrong with my setup.
Perhaps the driver for my compas changed default alignemt of the sensor so I checked also compass when yawing the frame in my hands - in the MP it seemed the rotation is correct. Please can somebody here check my log from this flight and point me what happened to my copter?
2019-08-07 11-02-34.zip (209.4 KB)