Hello everyone,
Hopefully I’m posting in the right section.
I have a F450 quadcopter with a cheap Pix mini FC and some cheap 2212 920kv motors.
The quad used to fly fine before I changed the motors and the receiver to a skydroid system.
The old motors were a T-motor 880kv.
It flies fine for a few minutes until it decides to slightly spin in different directions as it falls to the ground causing a crash.
I’m attaching logs and a video link to some crashes as I’m out of options I’ve asked everywhere but I don’t know how to find the problem from the logs
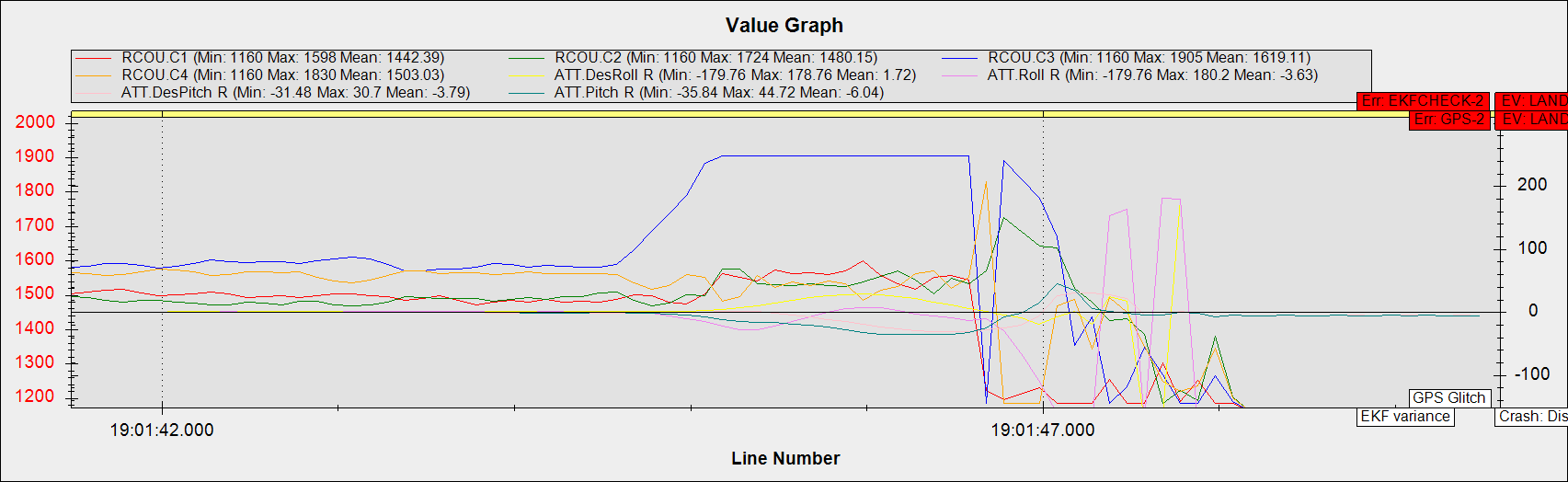
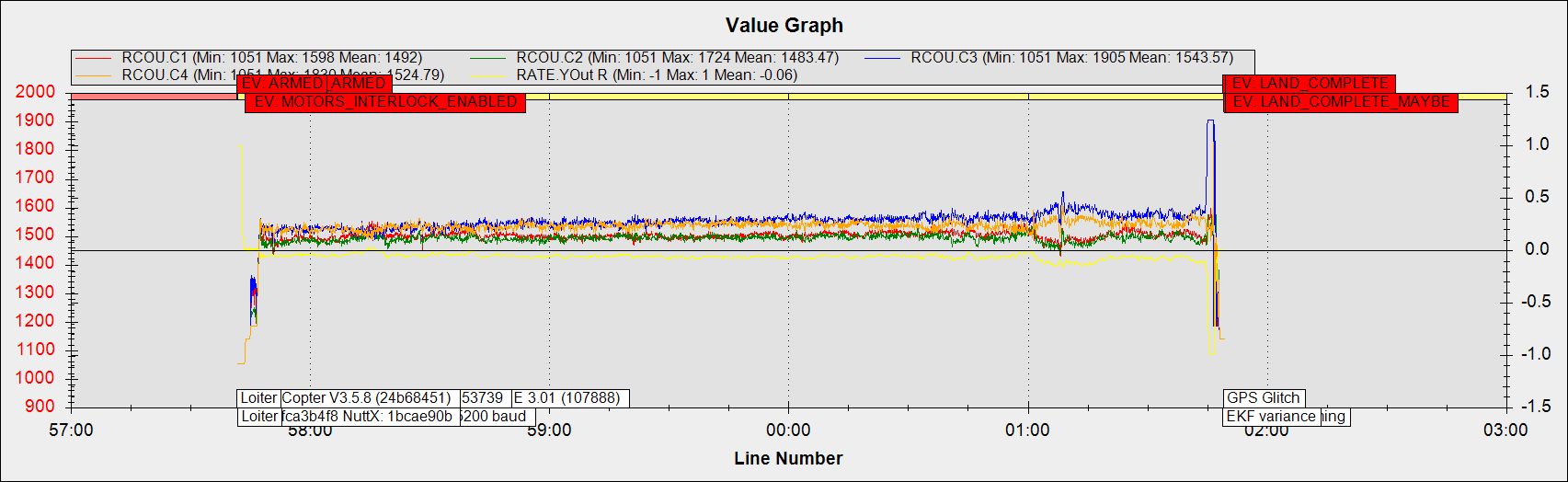
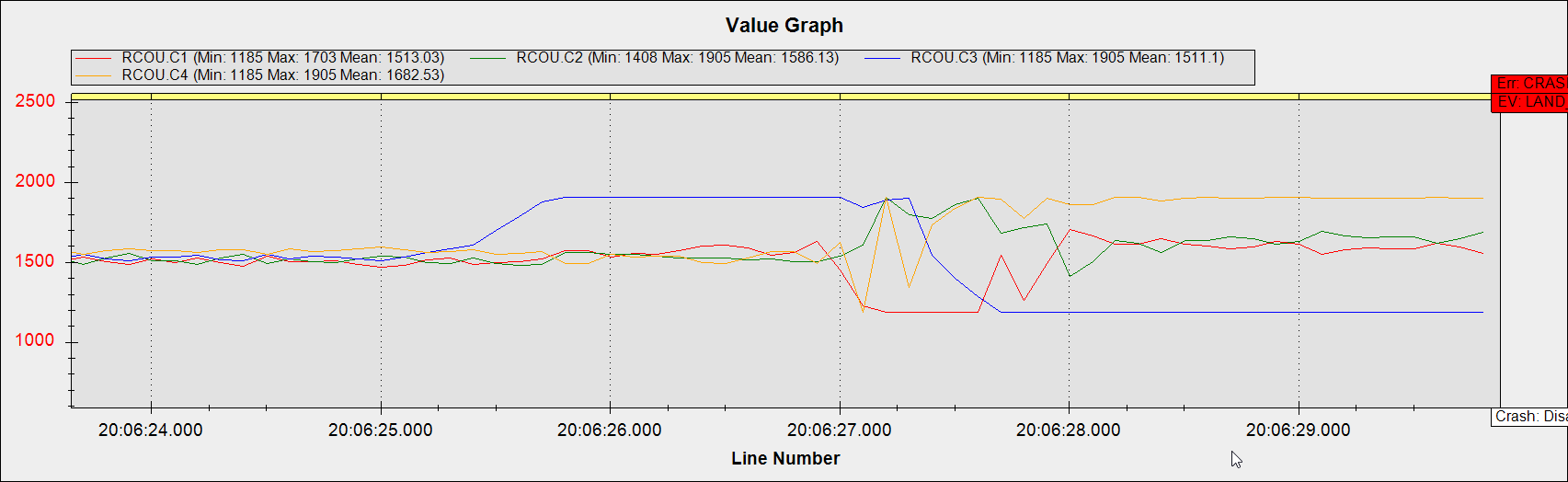
It looks like your 3rd motor(upper-left one) failed during flight. Your battery voltage, vibration, and EKF innovation level look normal. The vehicle roll/pitch angle is consistent with the way the x type quadcopter would behave in the event of 3rd(upper-left) motor failure.
There is also seems to be a yaw imbalance in the frame. You can distinguish it by comparing command send to motor 1-2 with motor 3-4. This could be due to arm twist, damaged prop, or wrong ESC calibration.
Hi @Emre_Saldiran,
Thank you so much for taking your time to help, I really appreciate it.
Are we sure it’s the 3rd motor that’s failing?
Since when spinning the motors for test, I hear the upper right (1st) motor making weird noise and alot of vibration so I figured it would be the faulty one, I have some spare 2212 920kv motors but not from the same supplier (it feels like they just change the stickers), is it fine if I replace it with one of those?
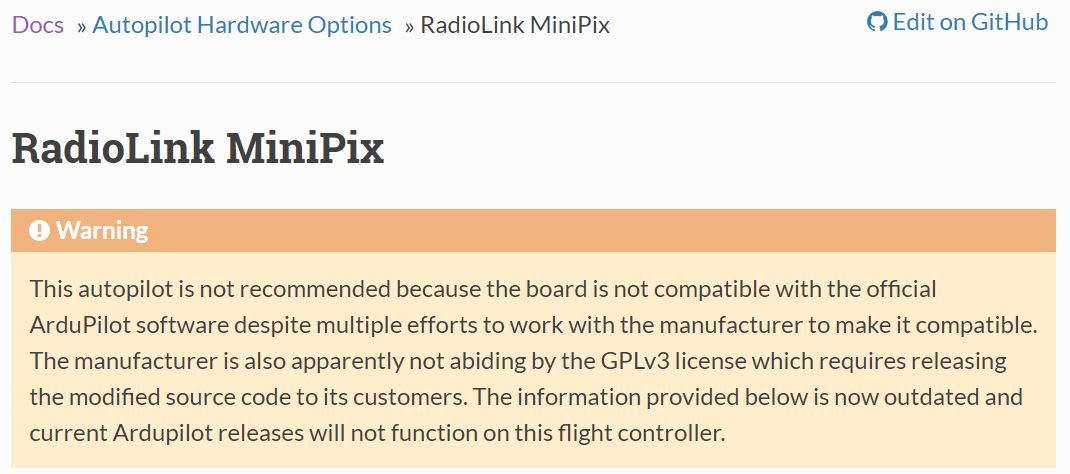
Regarding the version note, I’m basically trying to see what a cheap build would be able to achieve, so I got really cheap components and the FC is some Radiolink Pix mini v1, I flashed the firmware on it using the Radiolink ardupilot software and I was hoping it automatically gives me the latest stable version.
I replaced the upper left motor and tested it, first flight, 10 minutes, no issues, second flight, 5-7 minutes no issues, then after a few hours I went for another test flight, basically hovering in the same position, and it did the same thing, crashed.
I got the logs, but I can’t see what you’re seeing, what kind of logs viewer are you using?
Personally, I would ditch Radiolink Pix mini v1. The firmware is outdated and close source. There are other cheap options on the market that don’t violate the GPLv3 license. You can find more information related to Radiolink Pix mini v1 in this thread.