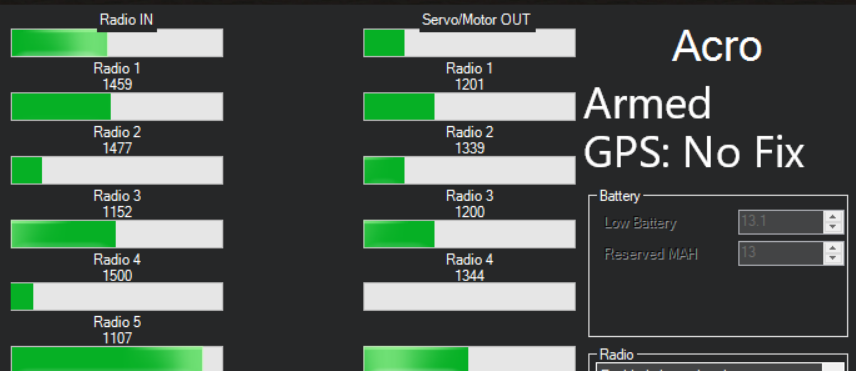
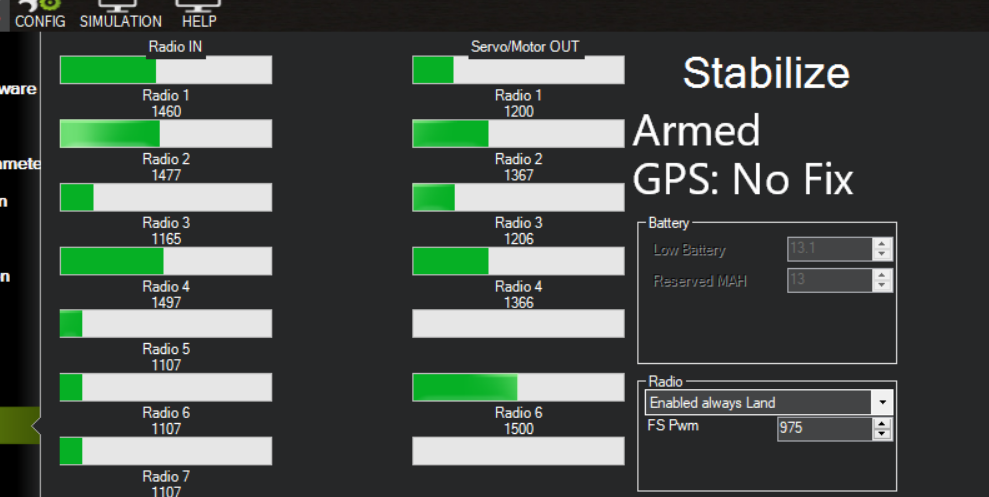
Hey guys, I’m starting my quadcopter on an inclined surface and these are my signals on the 4 channels. Is there anyway I can fix this and have the 4 Radio channel giving out the same PWM?
No, you can not fix a non-existing problem.
When landed it is a open loop control system, hence the RCOUT values are invalid and that is normal and expected behaviour.
Just takeoff.
1 Like
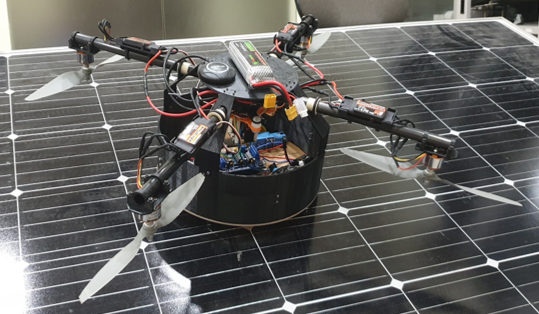
Yes I can understand that but I’m not trying to take off. In fact I’m trying to do the exact opposite… It’s a long story but when my drone lands, I plan on using the four propellers for negative thrust so that my robot sticks to the panel as shown in the image. My robot can fly normally like a drone and when it lands on the solar panel surface, tilt rotor mechanism will be activated so that it can provide negative thrust.
So yeah at this point I need to send out the same signal on the 4 RC channels
Are you tilting the motors by twisting the arms? That might be a very bad idea, any mechanical slack will be translated to yaw imbalance.
You need some lua scripting to make the motors rotate in the opposite diirection, it will be far more robust!
1 Like
Yeah even if the motors rotate in the opposite direction, I wouldn’t get enough thrust from the propellers because they can only produce strong thrust in the right direction.
I will take care of the mechanical part. I got the robot running on a 20 degree inclined surface but that’s with “very” unequal thrust in stabilize mode. Now I want to sent out equal PWM signals. Maybe use pymavlink library?
How sure are you that at the same RPM the thrust if higher in one direction than the other? Did you measure it?
No, use lua sripting.
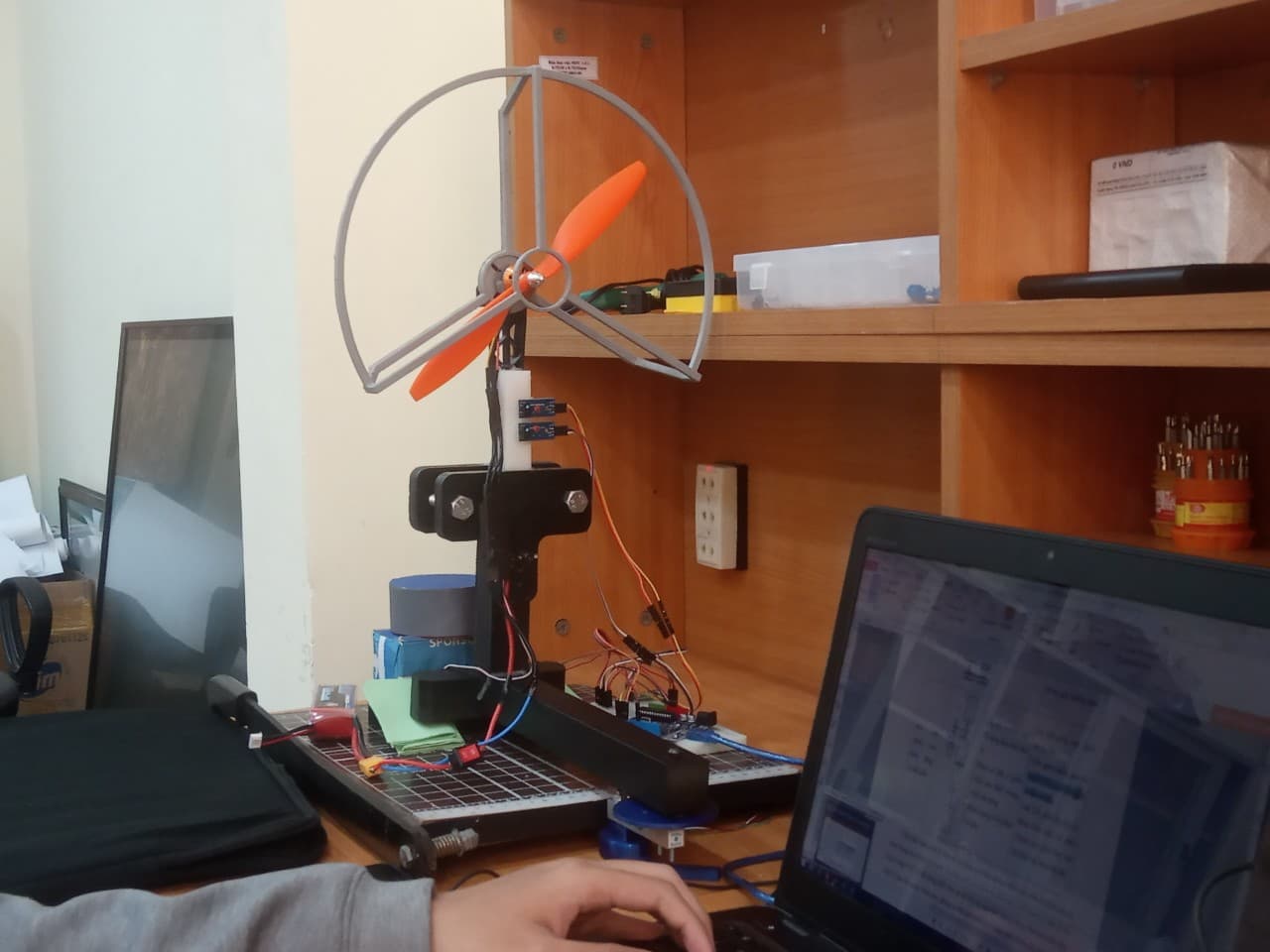
Well yes… actually. I measured it using a simple setup with a loadcell, something like this (picture) and data shows that simply reversing the spin direction gives little thrust, approximately four times less then spinning in the right direction, and I have to use my opto switch to switch the 2 of 3 phases.
No, just use a reversible ESC. No need for 2 pin hardware switching
Also thought of that, not available in my country and it would take too long to ship here plus like I said, the thrust is no where close to what I need it to be for the robot to go across the panel if I just reverse the spinning direction.