I currently use Mission Planner. They have a tricopter and a quad (duh). Does anyone offer a setup for 2 rear blades stacked and 2 standard forward blades? Essentially its a quad in a tri formation. I dont want to depend on a servo for yaw
Like this?

FRAME_CLASS 7, FRAME_TYPE 19
1 Like
Exactly. Haven’t looked at the frane config for a while tbh. That in mission planner already? Computer is in shop and I am having a lazy moment…lol
It’s not really a Mission Planner question, it’s whether Arducopter supports the frame type. And it does. AFAIK it’s been a choice in Frame Class/Type for years.
Thanks a lot. I will look into it.
Do not use this type of copter. Yaw performance is really really bad. It only uses the torque of 2 motors for yaw control, instead of 4. It is combining the downsides of a regular quadcopter and a tricopter.
There is a way to improve yaw performance a little bit: mount the rear motors at an angle to one side (depending on the rotation directions of the top and bottom motor). 2-5° are enough. This way, torque and thrust are used to control yaw.
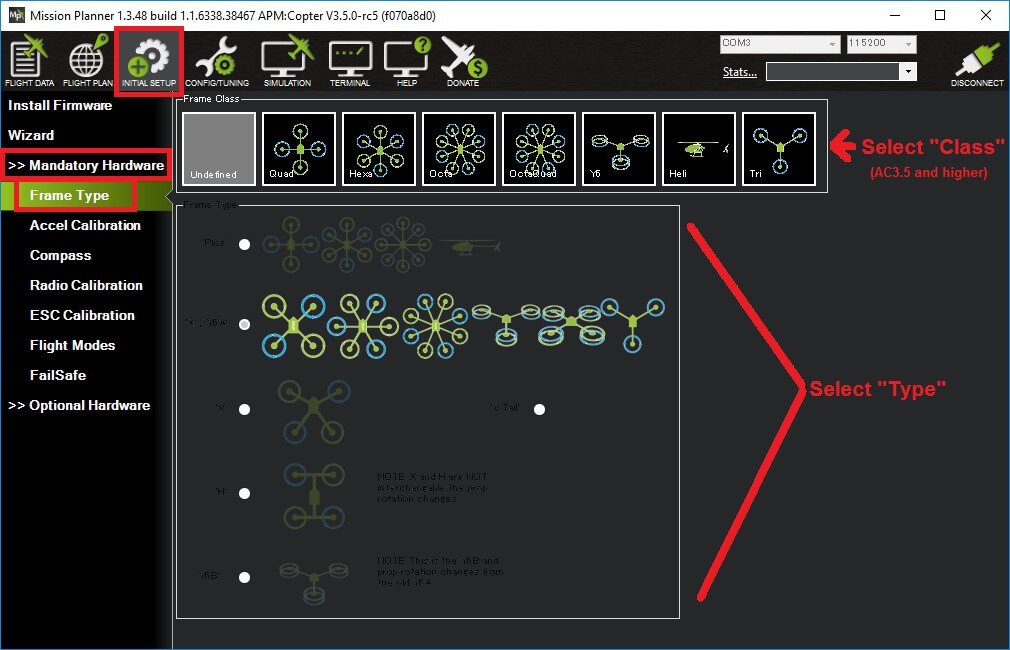
I am trying to setup a Y4 copter. I can see that the frame is not instantly available at the Frame Type configuration.
According to the ardupilot parameters wiki:
FRAME_TYPE: Frame Type (+, X, V, etc)[¶]
Note: Reboot required after change
Controls motor mixing for multicopters. Not used for Tri or Traditional Helicopters
So if I set Frame_Class to 7 (Tri) will it take into consideration the Frame_Type=19?
Sure it is. Y4-19 and it’s a Class-7 Tri. What’s the confusion?
Just set it in the Full Parameter list.
The frame type tab in missionplanner is just a quick select tab. You can chose among the most used frame types to make it easier to setup. In reality, there are more frame types not visible here since they are quite unusual.
All the tabs under mandatory hardware and optional hardware will give you a limited amount of settings to change, just the once you will need most of the time. Through the full parameter list, as Dave suggests you use, you can find all parameters in arducopter-
Set the parameters Dave suggests and you will end up with the right frame type and class!
…
My question was if ardupilot takes into consideration the Y4 frame type when it is set up as a Tri frame class. Check the quote on my first comment please.
The Y4 frame type is a Tri configuration what more do you need to know? Set both type and class as stated multiple times.
Use the full parameter list and set:
Y4 is classed as a quad since it has 4 motors.
So:
Frame class: 1
Frame type: 19
And before you set it all up and built the copter, take into consideration, why the Y-4 is not in the primary selection of frames.
The yaw control is really really poor. It can only use the torque of 2 motors for yaw movement, instead of 4 motors like a regular quadcopter. Yaw will feel like you control the copter with a rubberband.
One way to improve this, is to tilt the two rear motors 2 or 3 degrees, depending on the rotation directions. If the top motor rotates CW, tilt it CW around the boom. The lower motor then rotates CCW, so tilt it CCW. This results in a thrust assisted yaw control.
hi
does anyone know the configuration of the tricopter without using the tilt servo?
I use 3 CCW propellers on each motors with each channel 1, 2 and 4
A Y4A or a Y6 otherwise no Yaw control.