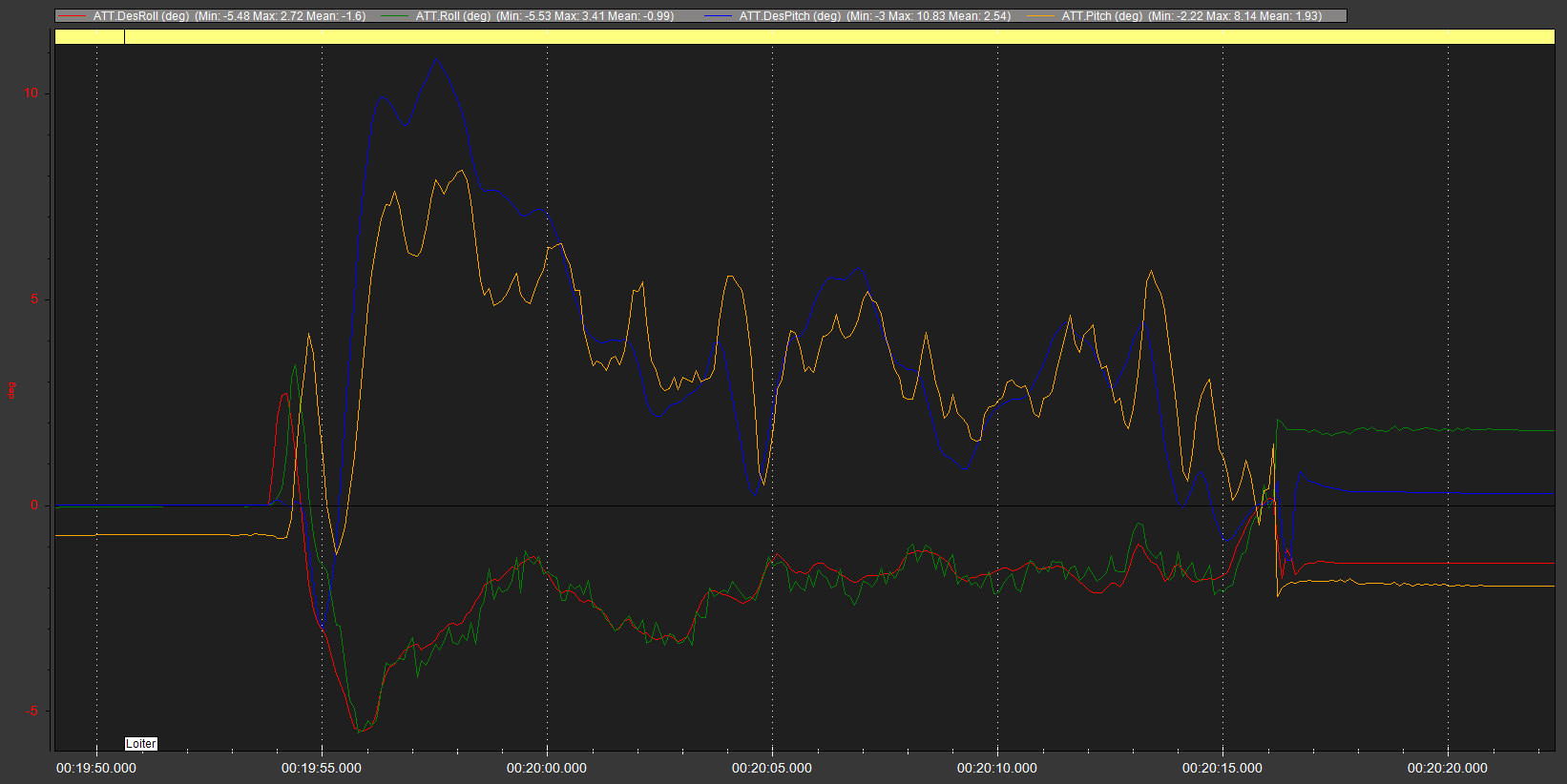
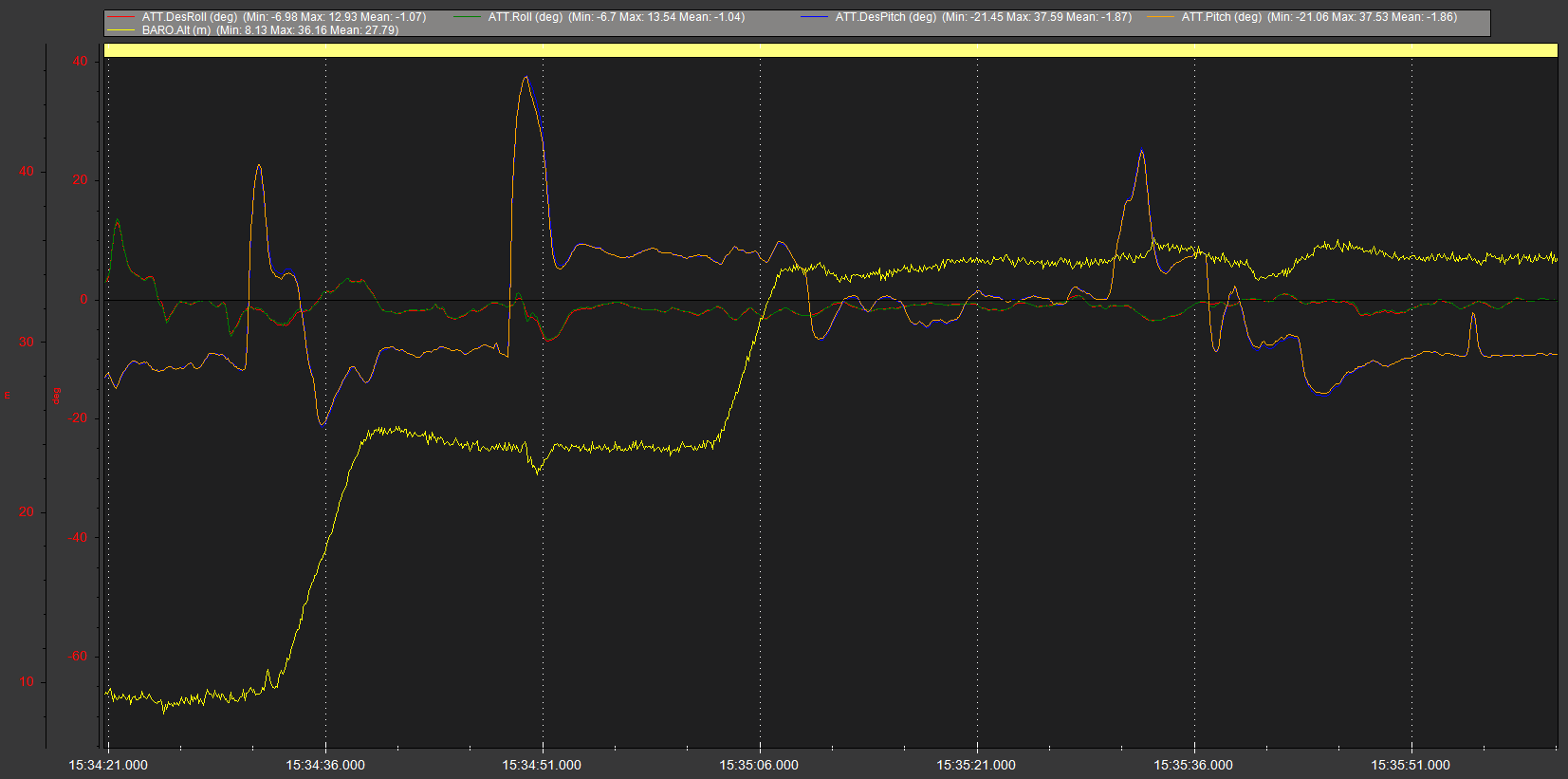
The ANGLE_MAX shouldn’t change any behaviour except when reaching that limit, so it is unlikely to be the cause of instability. You only reached 10 degrees maximum on that log, mostly 5 degrees.
I would say the issue is still tuning and this flight was worse than previous flights because the attitude control got affected more for some unknown reason. Maybe wind or temperature was different…
Don’t even worry about guided mode and missions until tuning is nailed down. Otherwise you’ll end up confusing tuning issues with flight mode behaviour and it will be more confusing than necessary.
You could set ANGLE_MAX back to 45 degrees for now, then later increase it when needed.
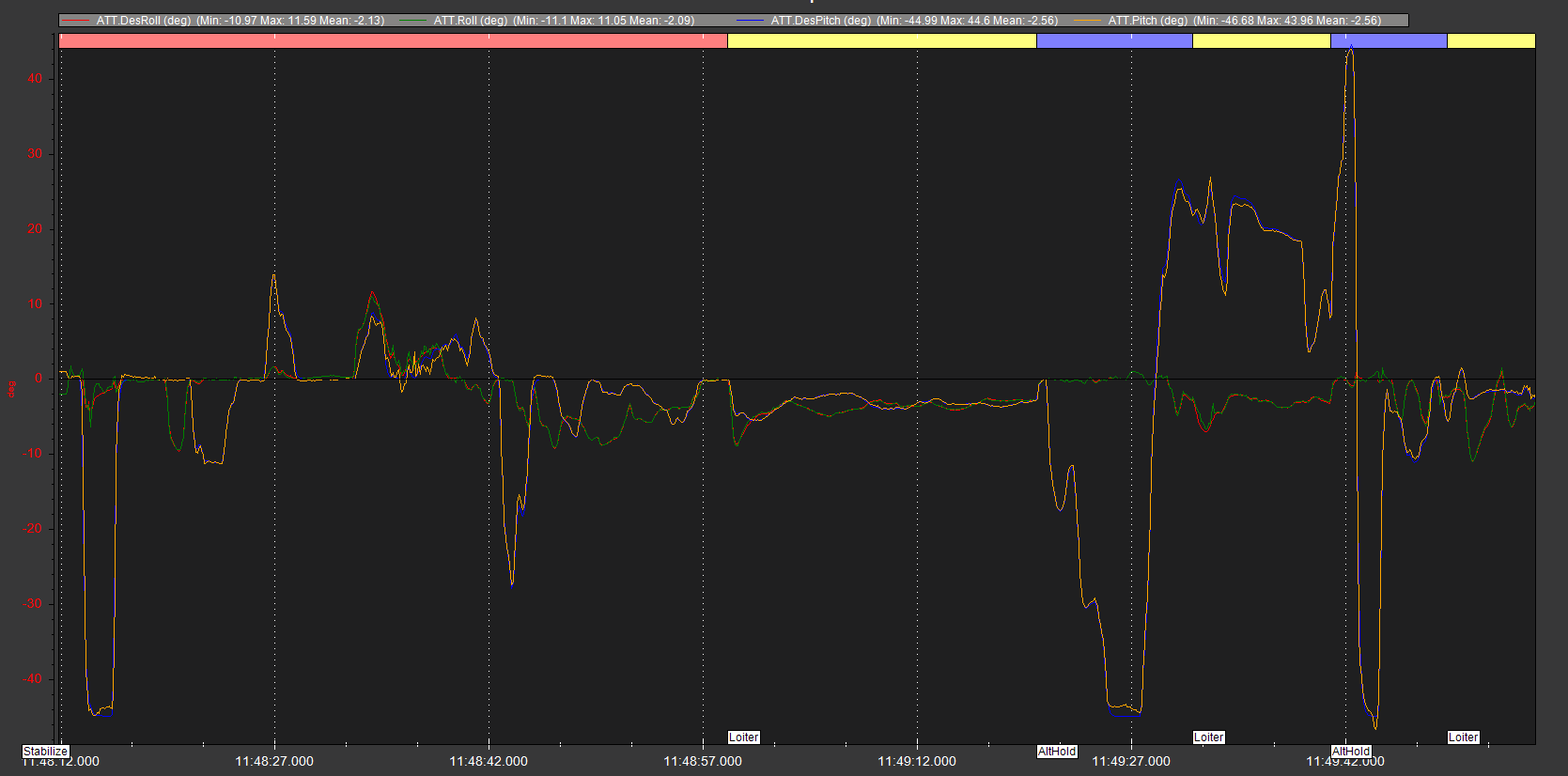
You key flight modes for testing will be Stabilise, AltHold and Loiter. Don’t worry about PosHold, it’s outdated and Loiter is much more configurable.
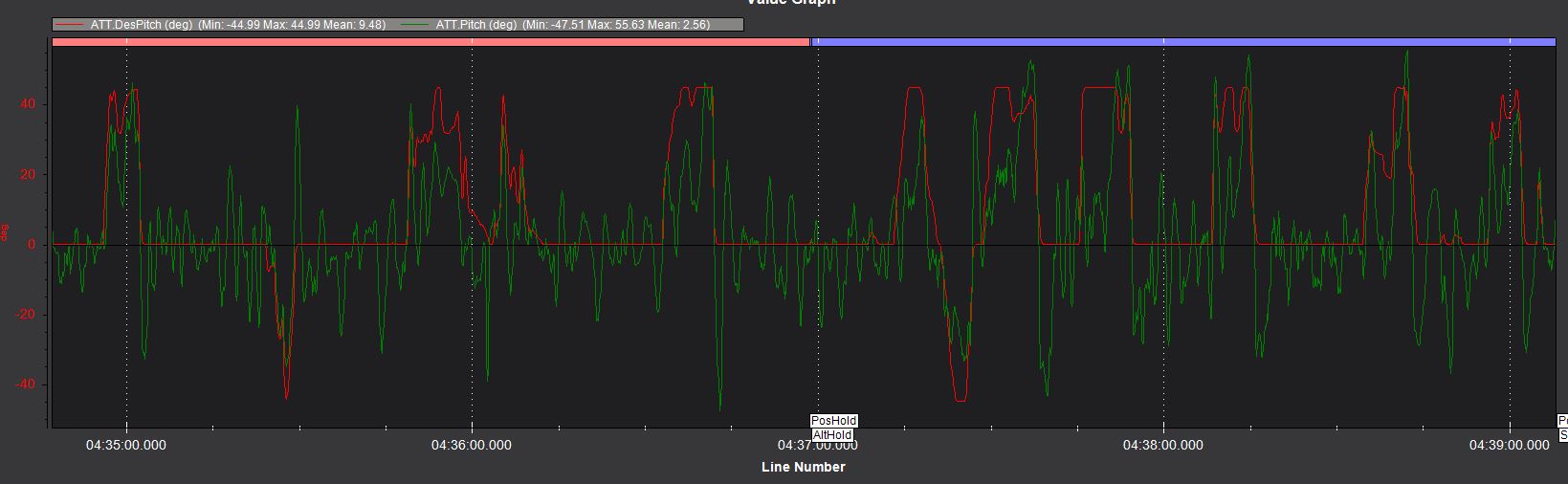
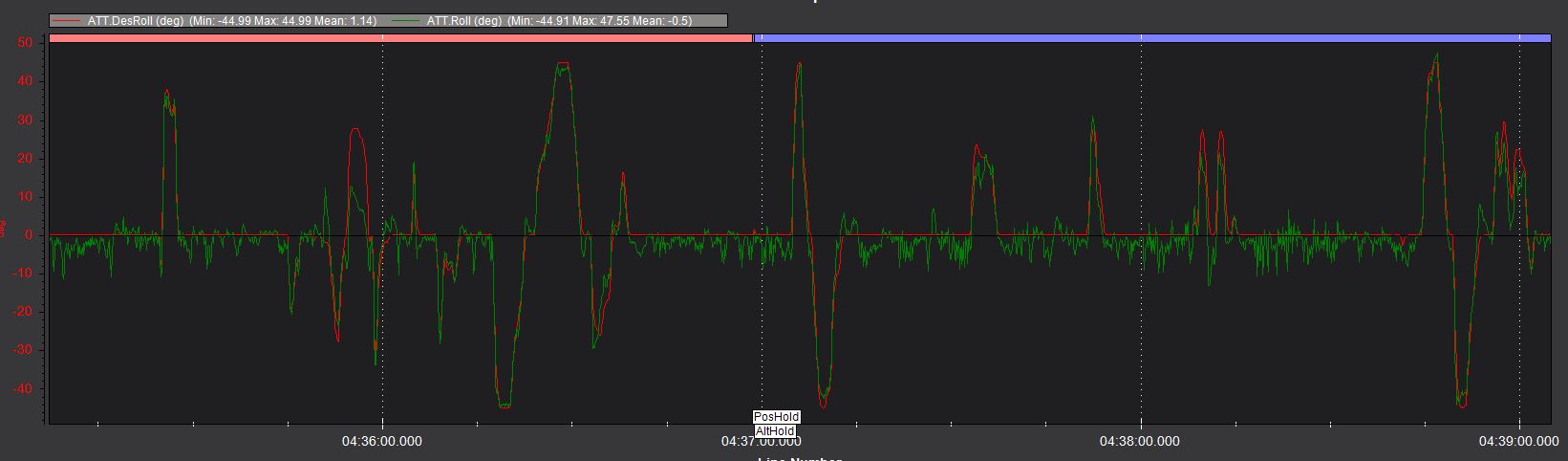
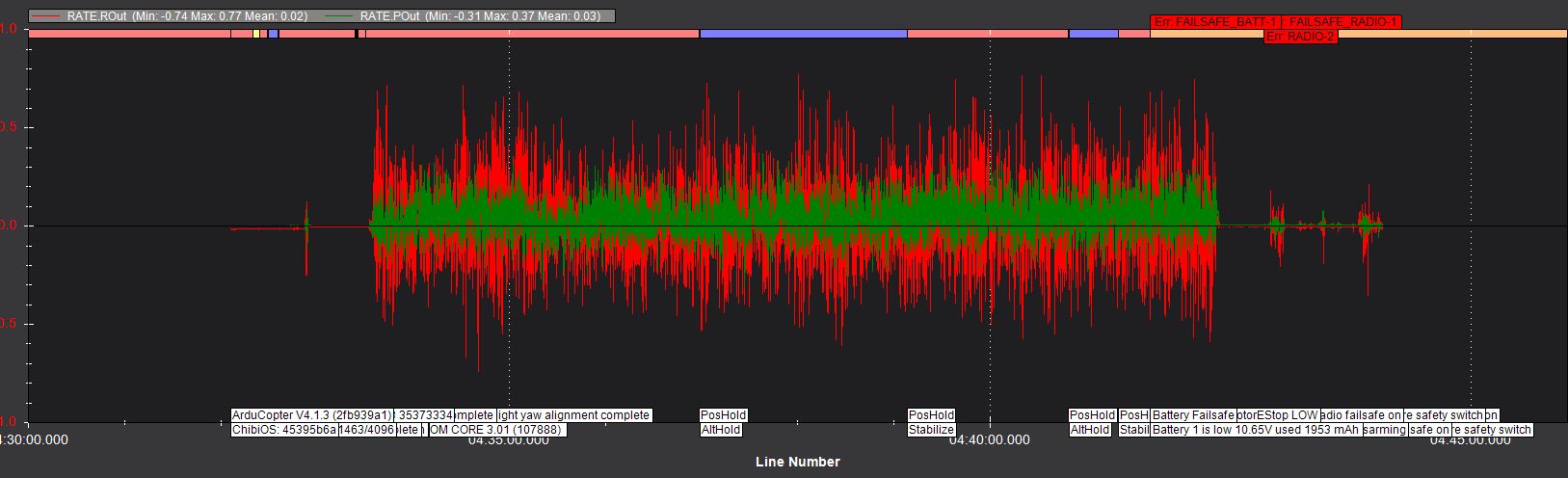
Pitch and Roll are behaving differently because of only running Autotune on Pitch. Each have their good and bad points.
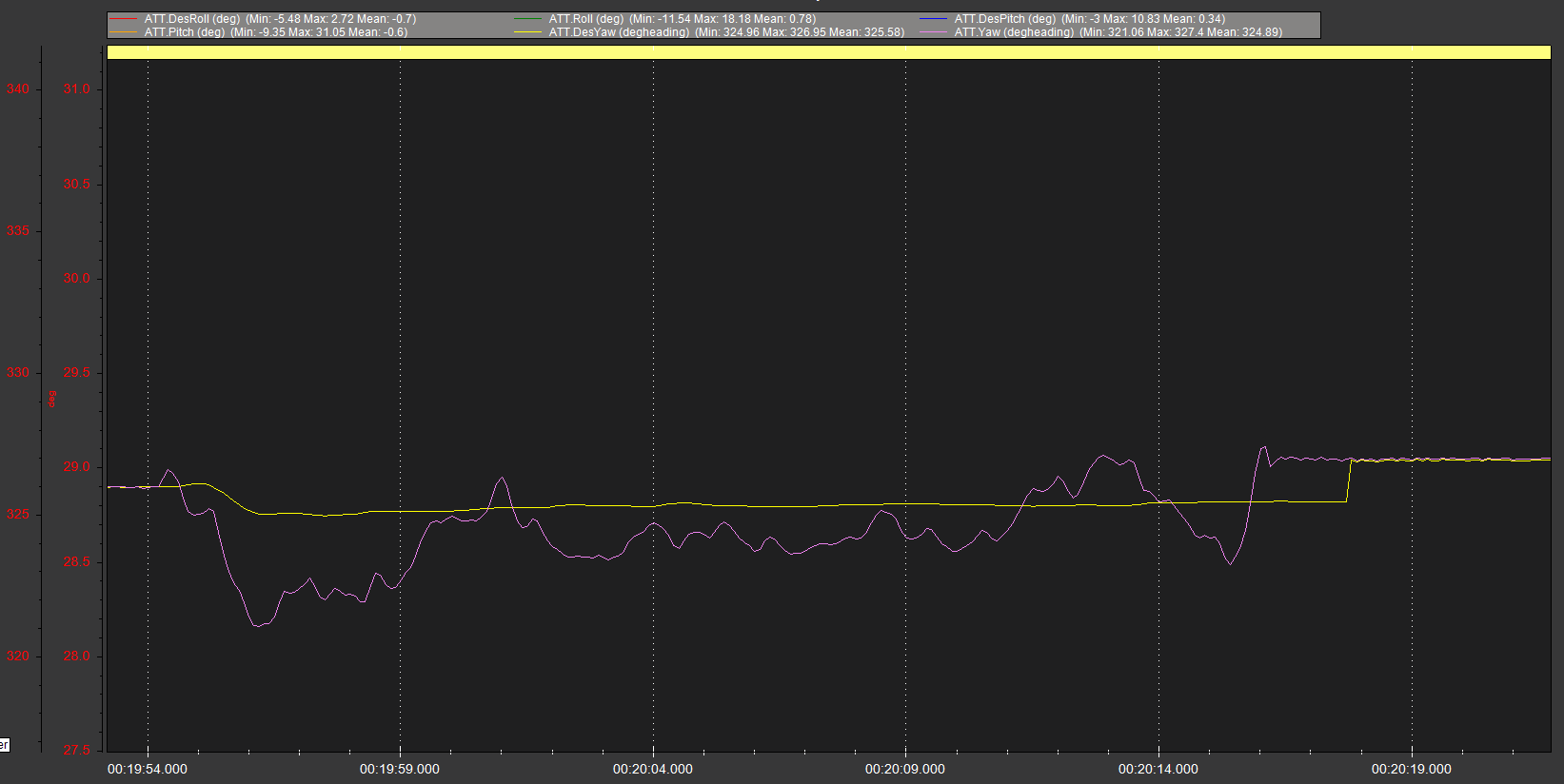
Yaw is not quite out of control, but it is doing it’s own thing and cant keep with Desired Yaw, mainly because pitch and roll are getting busy.
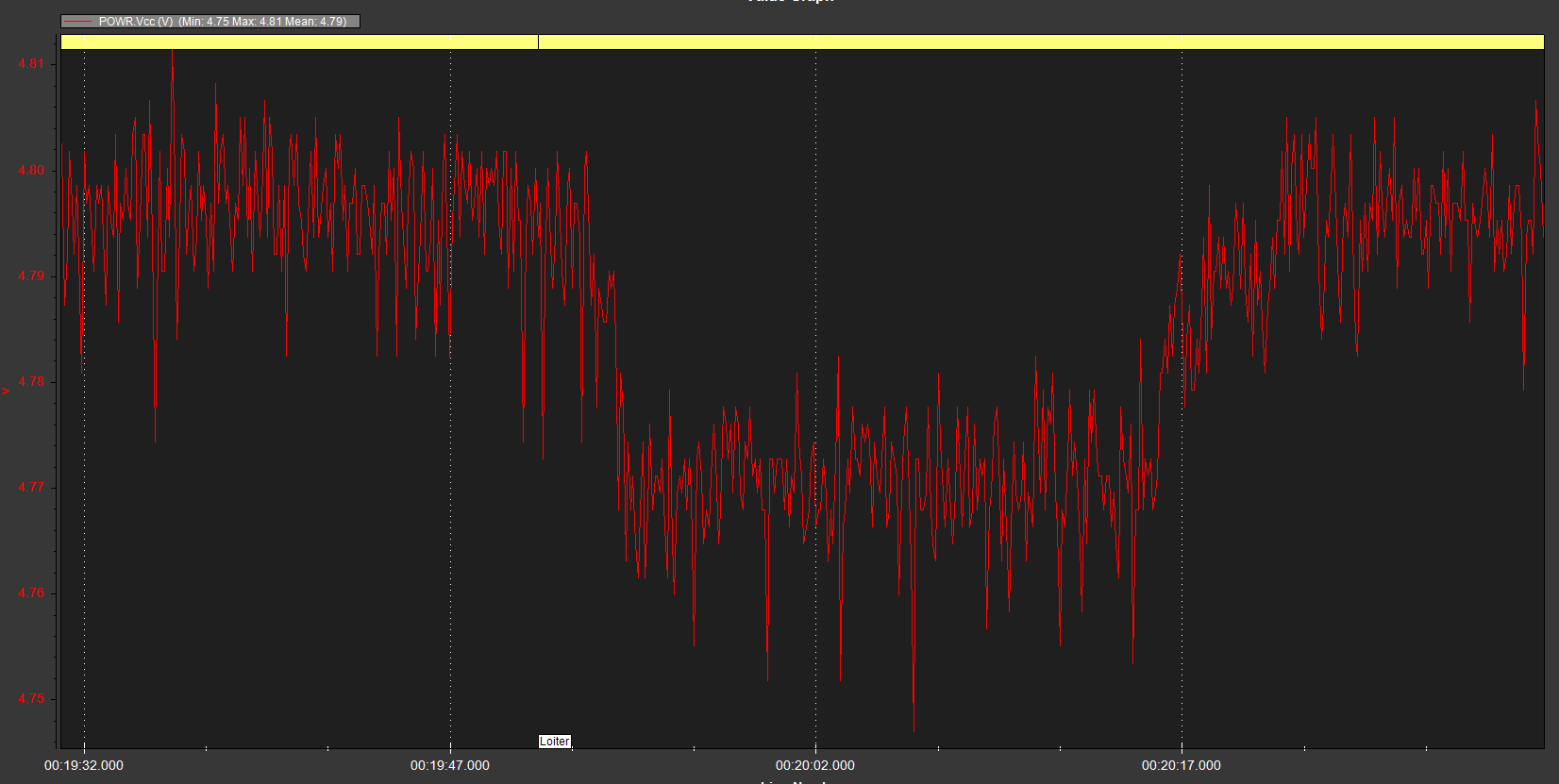
Your Vcc (5v dc supply to the flight controller) is going dangerously low. Check what it really is with a digital multimeter. You might want to add an electrolytic cap across the regulated 5 volts (on the FC board) and another right on the battery input side of the power brick. Or just throw it away and get a better one. Left how it is, this will eventually cause a mid-air brown-out and crash. The cheap Pixhawk clones come with a power brick that is missing key parts and the main FC board is usually also missing important power management parts - all meant to ensure reliability, but excess to requirements when price is king.
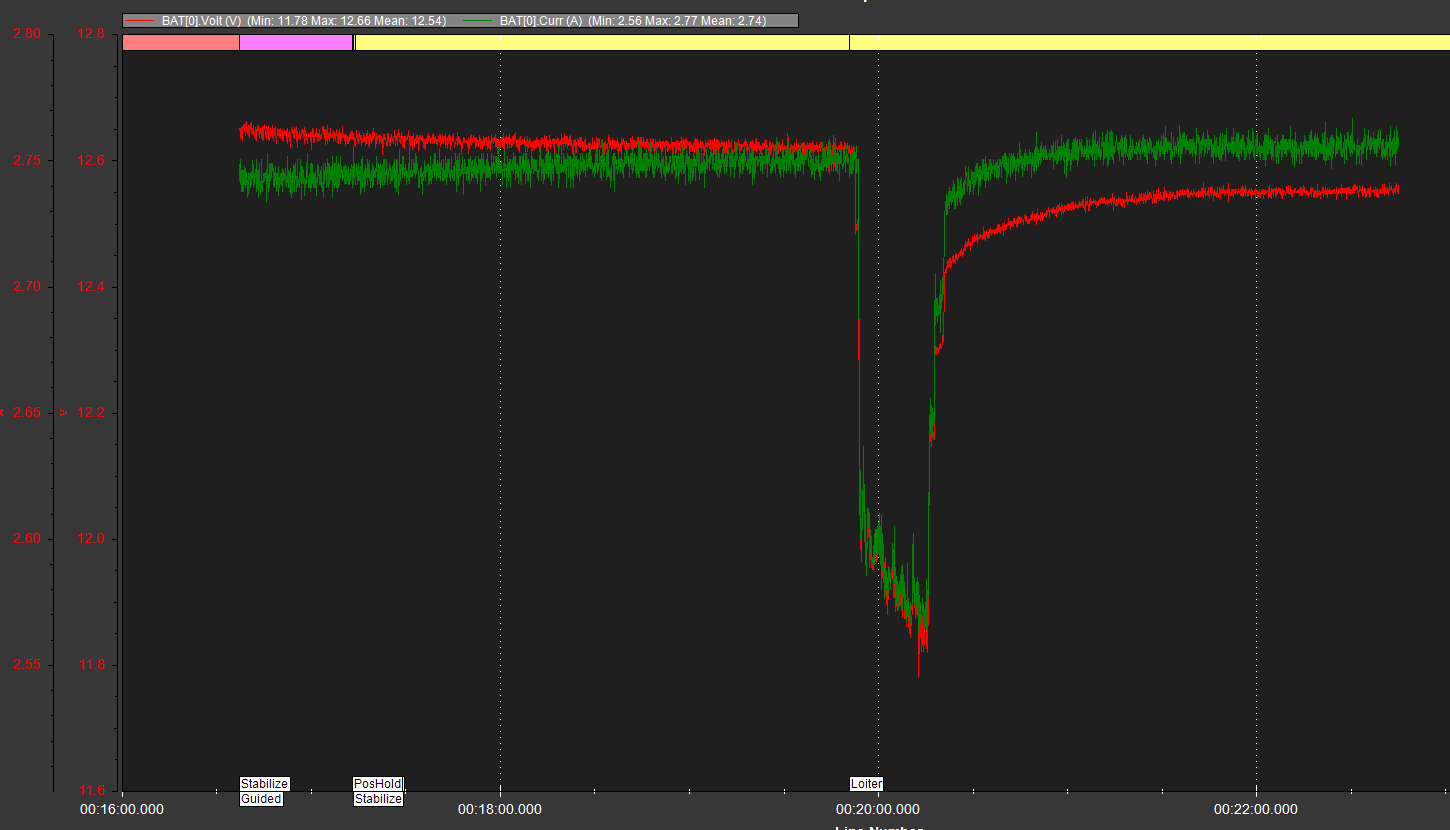
Your battery voltage monitoring is OK but you might want to verify the accuracy. Current monitoring is definitely wrong though, it more closely matches the voltage reading in trend, which is backwards for current. Check wiring, which wires go to which pins. Shorted current and voltage monitor pins?? maybe that power brick is bad?? Unsure…
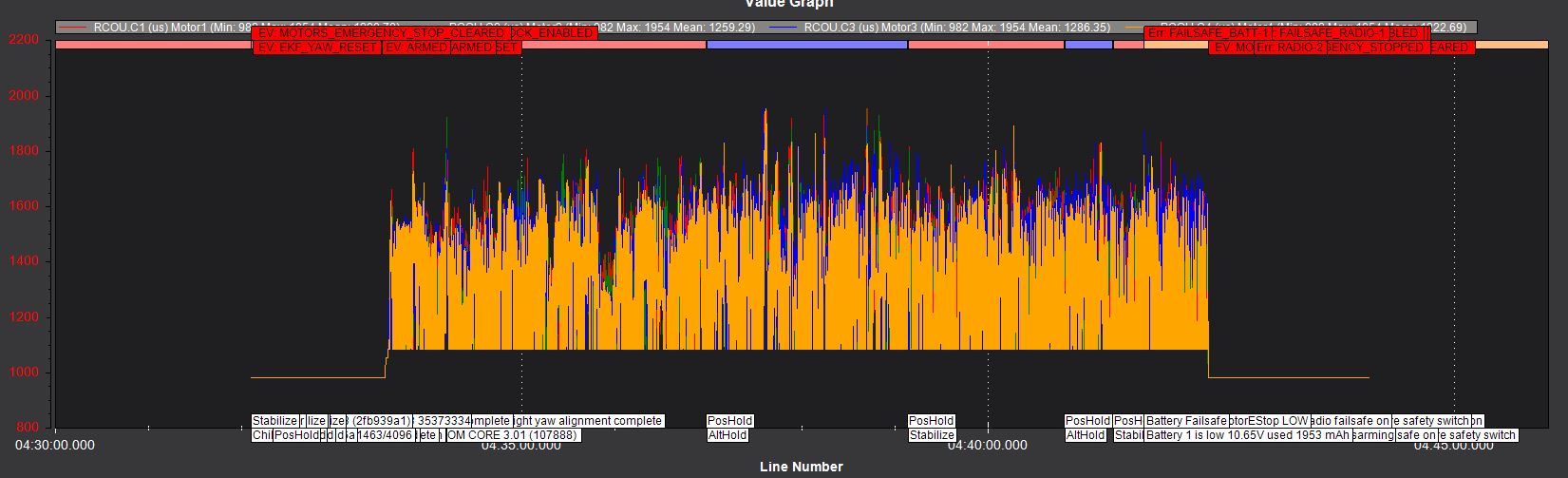
There seems to be plenty of “power” or thrust, you might want to lower MOT_SPIN_MIN,0.15 to about 0.12 so motors don’t hit that minimum (much) during normal use.
There are a lot of default values.
Definitely set more values by connecting to MissionPlanner, go to Setup, Mandatory Hardware, Initial Parameters
Put in you prop size and battery cells there, also select the other optional parameters check box (not the T-Motor Flame settings though) and accept everything it offers.
Apart from a bunch of filter settings, this will also set the Fence, meaning you cant arm until there’s a good 3D fix (which takes time, and that’s a good thing) but it will also set the correct battery voltage related settings and these babies:
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
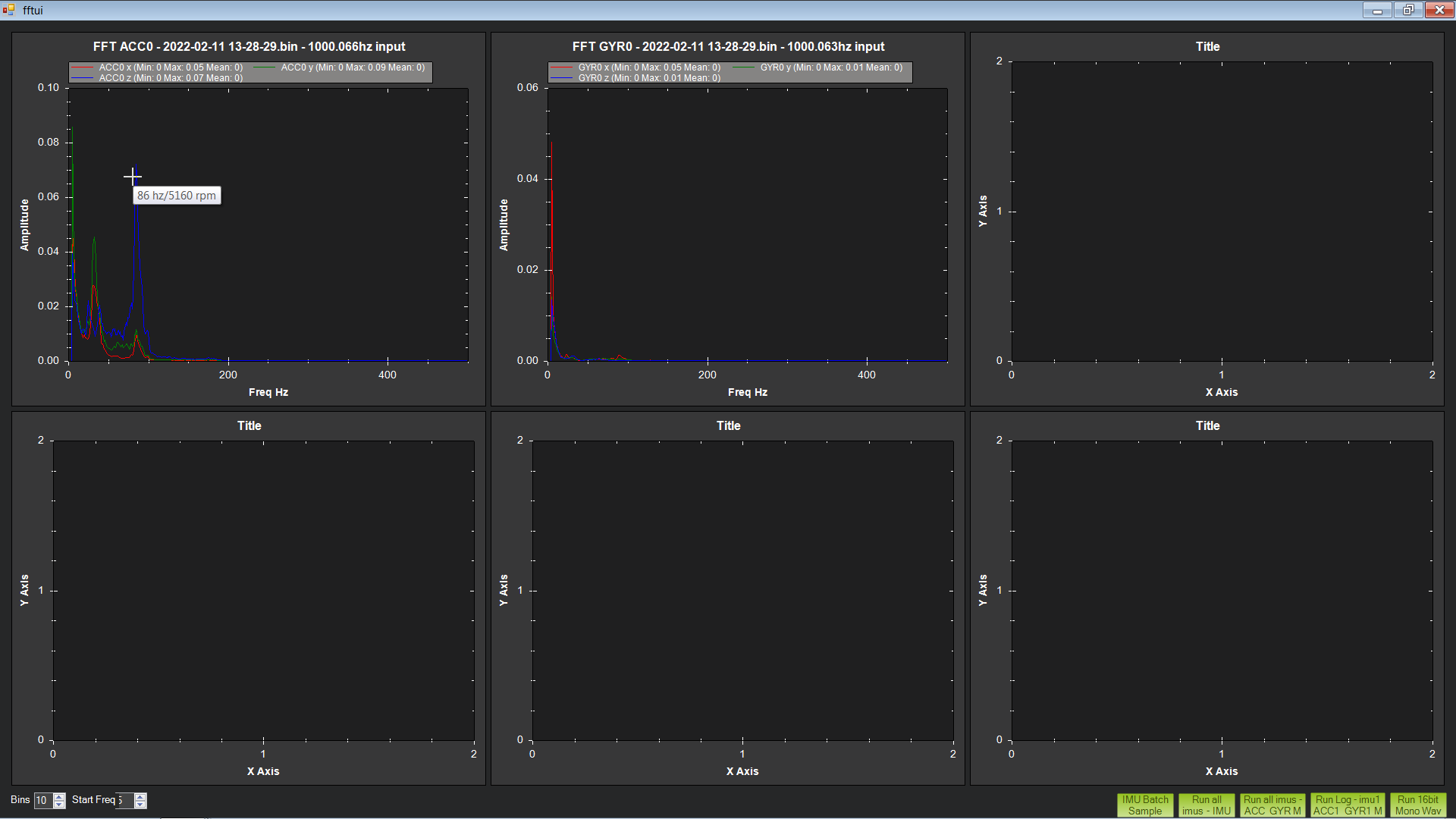
Also set these before the next test flight, to even out the PIDs between pitch and roll and get some logging for the Harmonic Notch Filter configuration
ATC_ANG_RLL_P,6.5
ATC_ANG_PIT_P,6.5
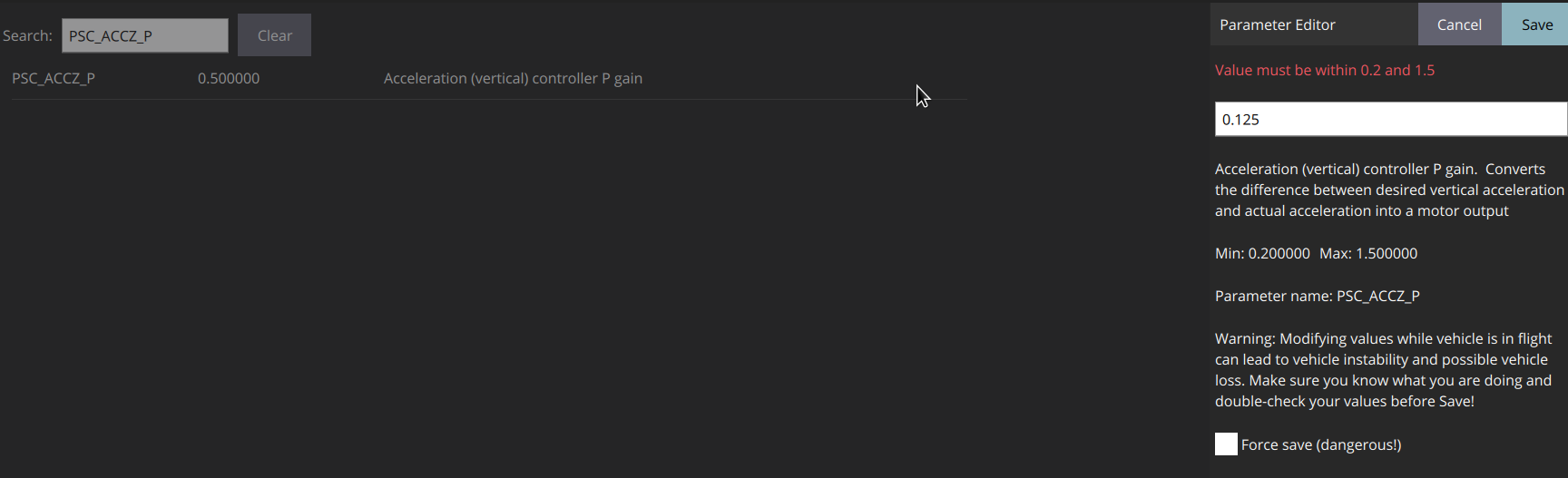
ATC_RAT_RLL_P,0.12
ATC_RAT_RLL_I,0.12
ATC_RAT_RLL_D,0.0075
ATC_RAT_PIT_P,0.12
ATC_RAT_PIT_I,0.12
ATC_RAT_PIT_D,0.0075
INS_LOG_BAT_MASK,1
Also to help out the GPS module set this, it might also improve that wandering position in Loiter:
GPS_GNSS_MODE,65
Now let’s see the .bin log from the next flight