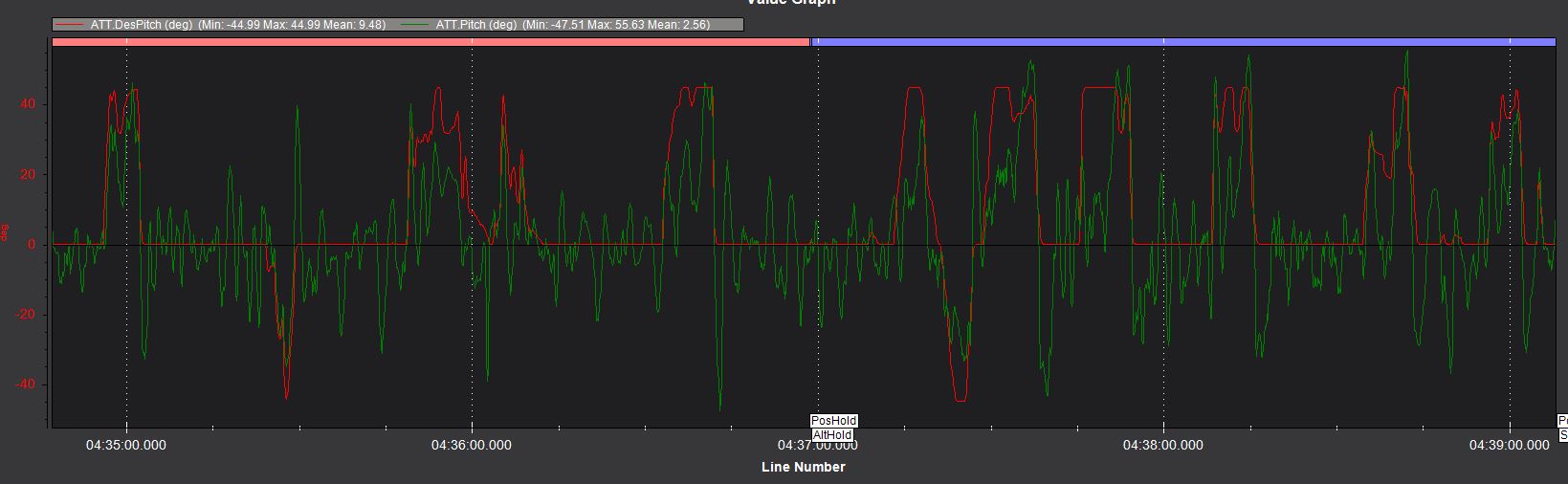
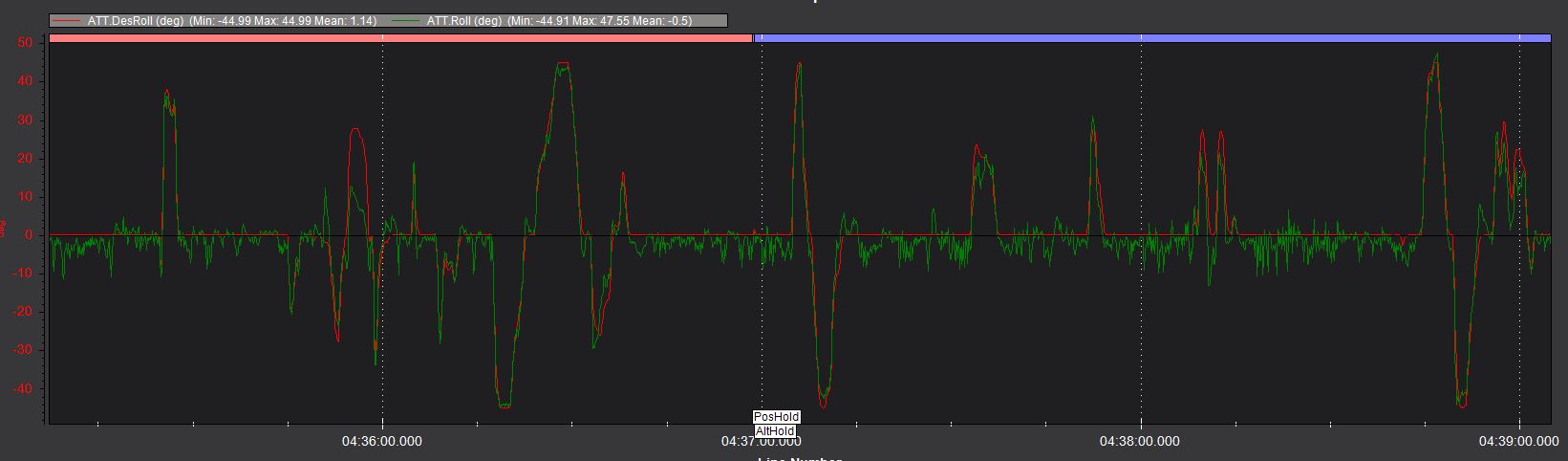
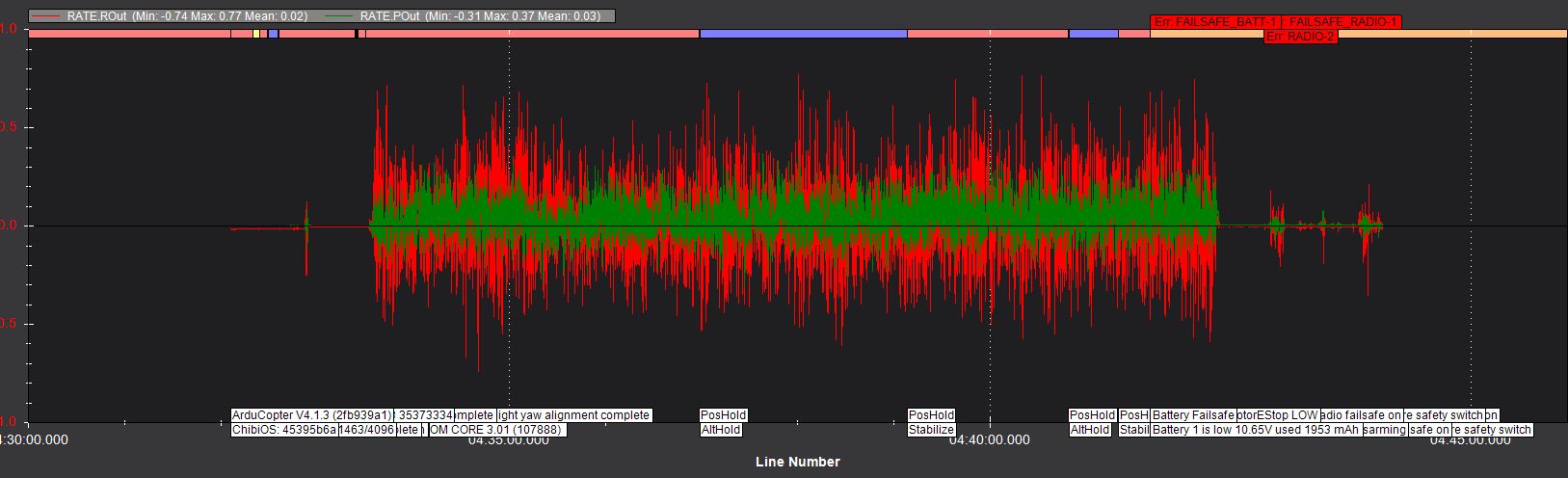
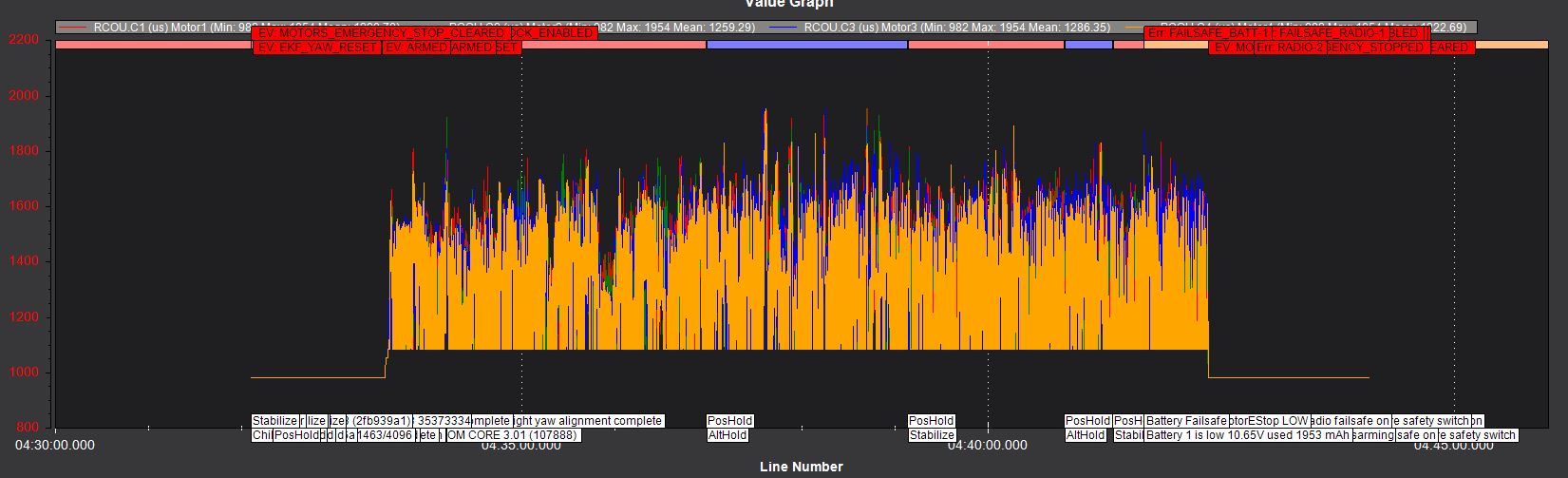
The tune on this craft is terrible and the motor outputs are oscillating wildly. Why are you using EKF2?
For reference this is what you want to look at in the logs:
The Initial Parameter Setup in MP is just that, Initial. Real tuning starts from that.