Quadcopter has crashed.
Please analyze the log and assist me with discovering the exact cause.
The observation crash is caused by Motor 2 not responding to Autopilot PWM input.
I also predict that the battery will be disconnected while in flight.
I am not sure of the exact reason.
Please find the attached log
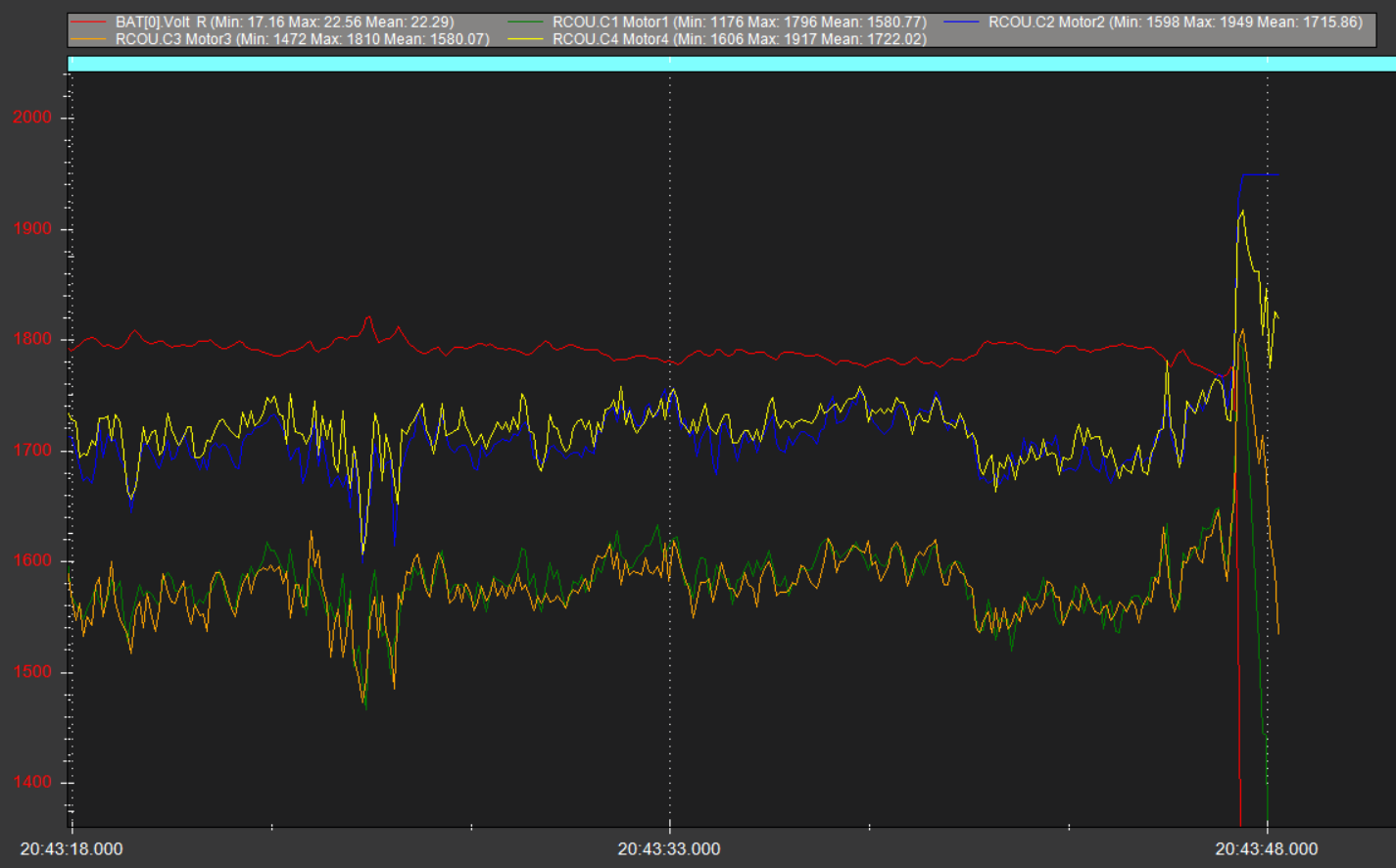
I took a brief look at the log, and I’m not sure there’s much story to tell. Battery voltage plummets quickly from just over 22V to near zero at the end of the log. I do see a possible thrust loss on motor 2, but the log ends very abruptly.
You have no ESC telemetry and no current logging, which would’ve helped tell the story. You also have two notch filters configured, the second of which is probably not doing much for you, but that’s hardly causal.
My best guess: you had a battery related issue. It behaved as if it were flown too deep into the low voltage range, which may indicate a poorly calibrated voltage sensor (especially since the log starts with just over 4V per cell, which seems low for a fully charged 6S battery). Or maybe it was just a tired battery.
I would say the power brick (voltage/current sensor) failed or battery connection failed. If the connectors become hot, the pins could lose contact. There should only be one main battery connector, and everything else should be soldered.
You can see over time the motors were commanded slightly higher and higher as battery voltage dropped - this is normal. Then the flight controller commanded maximum output of Motor 2 and the others too right as voltage dropped to nothing - but only M2 had a chance to show that effect before the flight controller died and logging stopped.
So I dont think it was related to M2 specifically, but more a problem of losing battery power entirely.
The battery voltage was going low, but not yet reached a critical level, providing the recorded voltages are accurate. It would be handy to have the current monitoring too. Definitely set this parameter: BATT_FS_CRT_ACT,1
Please verify the drone’s tuning (Roll and pitch) and let me know how it is doing.
Is it adequate, or does the uAV need to be tuned more precisely? @xfacta