Hello I recently build a f450 quadcopter but I am facing a serious issue about disarming the quadcopter. The f 450 quadcopter contains pixhawk which is flashed with the latest 3.6.9 version. The issue I am facing is that when I push the elevator / aileron stick completely or fully to the top bottom left or right or push the stick fully or completely to any diagonal the Drone disarms automatically means the motor stops even when the throttle stick is put to 100%. Due to this problem I have crashed my Drone many times as the motor stops completely during flyingflying. So I beg all of you to solve my problem as soon as possible I am attaching a video link for your better understanding. Please solve my problem as I am very worried.
Something seriously wrong with your radio (I guess). Do a log with log_disarmed 1 and arm/disarm a couple times, then send a log here. (.bin, not tlog or .log)
How to do that i am a noob in doing all that i just know how to build a quad and that too i have learned it from the internet so please help me do that . Thanks in advance
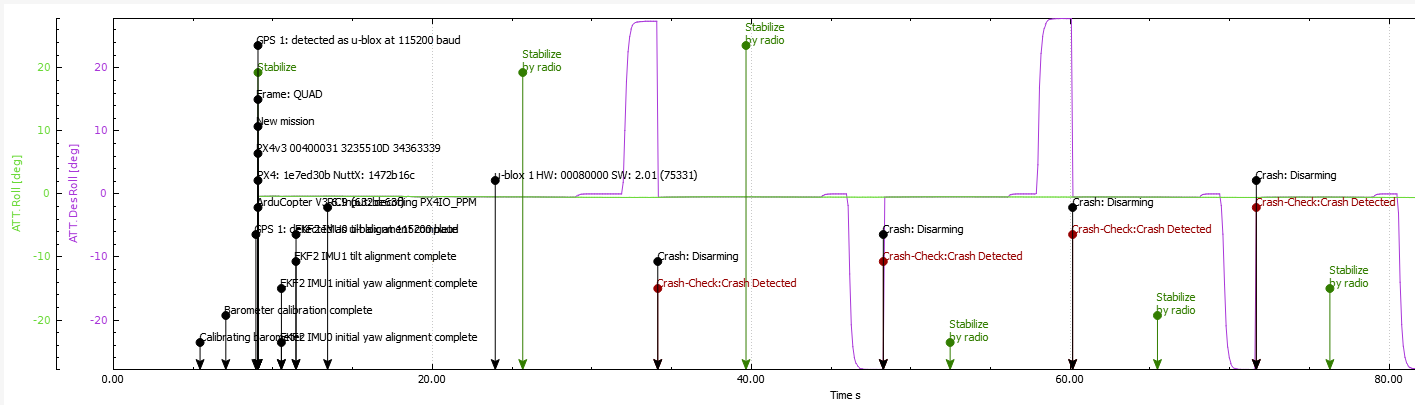
Your copter is disarming because it thinks it crashed. The desired roll/pitch values are significantly different from the actual roll/pitch (which is understandable, since it sits on the table without props.) It will not happen in the air under normal circumstances.