Hi
We were tuning our quadcopter. Almost towards the end of yaw autotune, drone lost altitude suddenly and crashed. Can someone please suggest what could the possible reasons be?
Here is the link
Hi
We were tuning our quadcopter. Almost towards the end of yaw autotune, drone lost altitude suddenly and crashed. Can someone please suggest what could the possible reasons be?
Here is the link
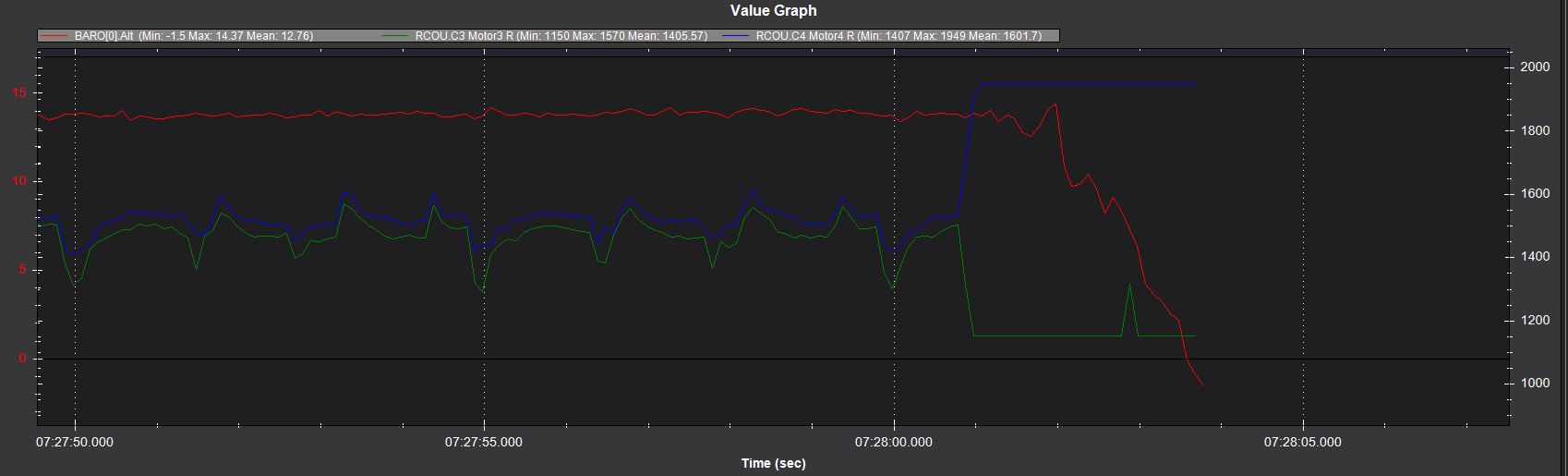
After a quick look it seems like the flight computer is trying to compensate for something. Motor 3 goes to minimum and motor 4 to maximum. Like it’s trying to compensate for a diagonal tilt.
The vibration values show no spike so it’s likely that the actual moment of impact never got logged. All values just stop logging and the last thing is the attempt to correct the tilt.
Check wiring, it’s possible that you lost power somehow.
Clearly thrust loss on Motor 4, Motor 3 drops to compensate and down it goes.
Why would it stop logging everything right after that? It’s like it just gave up. Not that it did that, bit a thrust loss shouldn’t cut the power off like that or stop logging?
Oh, I looked at the vibration values.
Missed the obvious.
Thanks!
I would have expected a Vibe spike when it bit the dust so there is still is some question but I guess the FC lost power before a spike could be recorded. You can definitely see a Vibe spike when Motor thrust was lost.
Yeah, there was a small vibe spike right at the end, but I just thought that was the increased motor speed causing some vibrations. But it was probably just a motor failure as you said.