I used pixhwak 2.4.8.
i armed quadcopter in loiter mode after flight of a minute its come down and quickly i disarmed to safe from but it goes to first alt. and disarmed there. please tell me what’s problem.
log : https://drive.google.com/file/d/1QkzP7rkMPYMKhChLhCroUF3DFRv3qq3K/view?usp=sharing
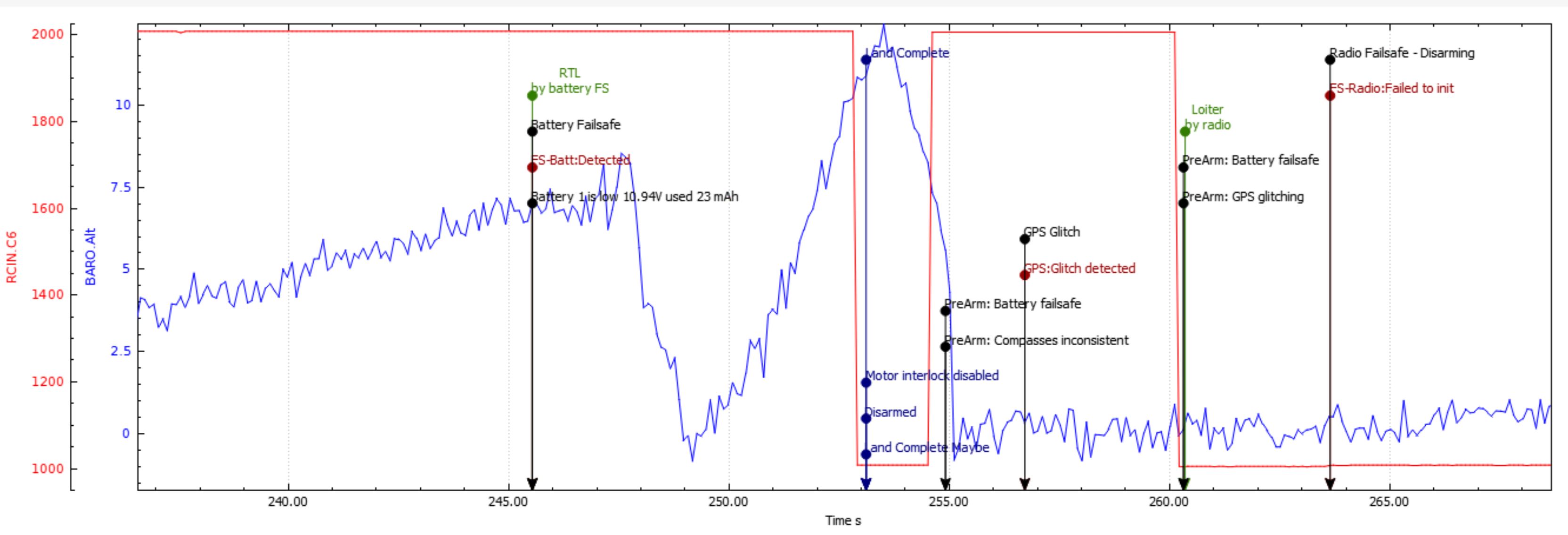
You had a battery low failsafe (it’s set too high) which triggered RTL. Then you disarmed it when it was ~11m in altitude with the Chan 6 switch you have configured as Arm/Disarm.
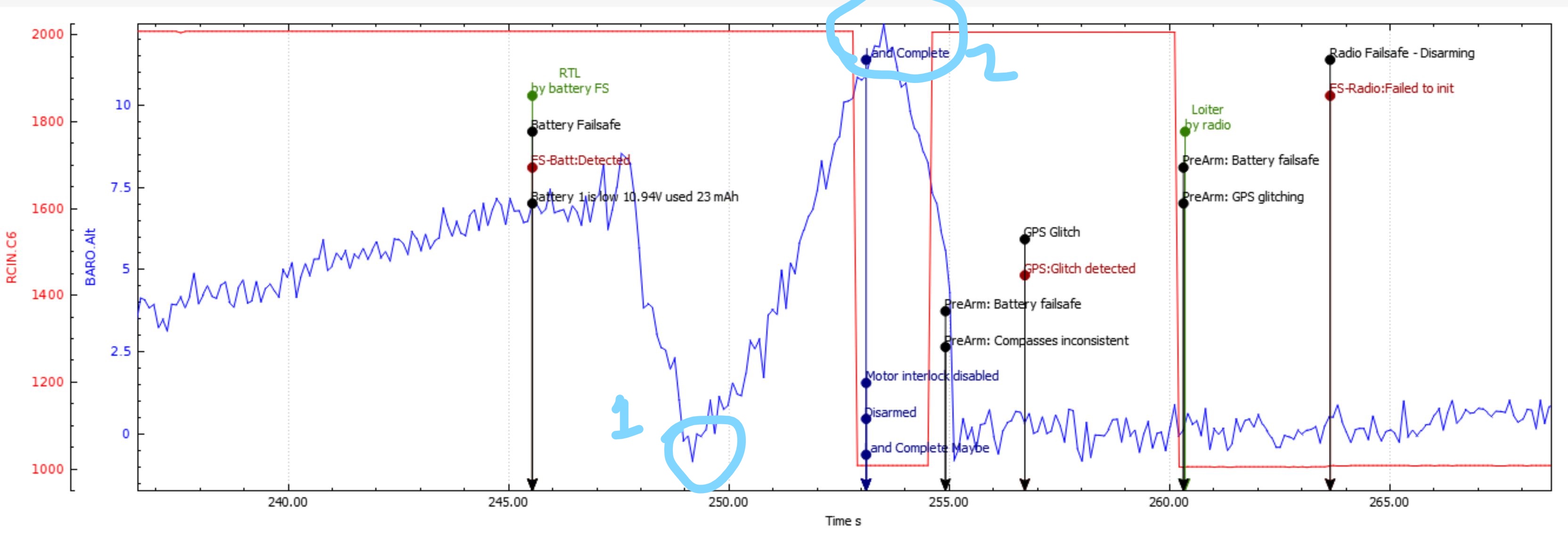
but at first position its altitude is near of 0 and then again it goes to 10 + alt.
and its goes very crazy also landed like a crash.
when drone is nearby 0 alt I quickly disarmed but due radio issue it disarmed at 10+ alt.
My main issue is why the drone landed and again take-off.
see my image
sorry for late reply
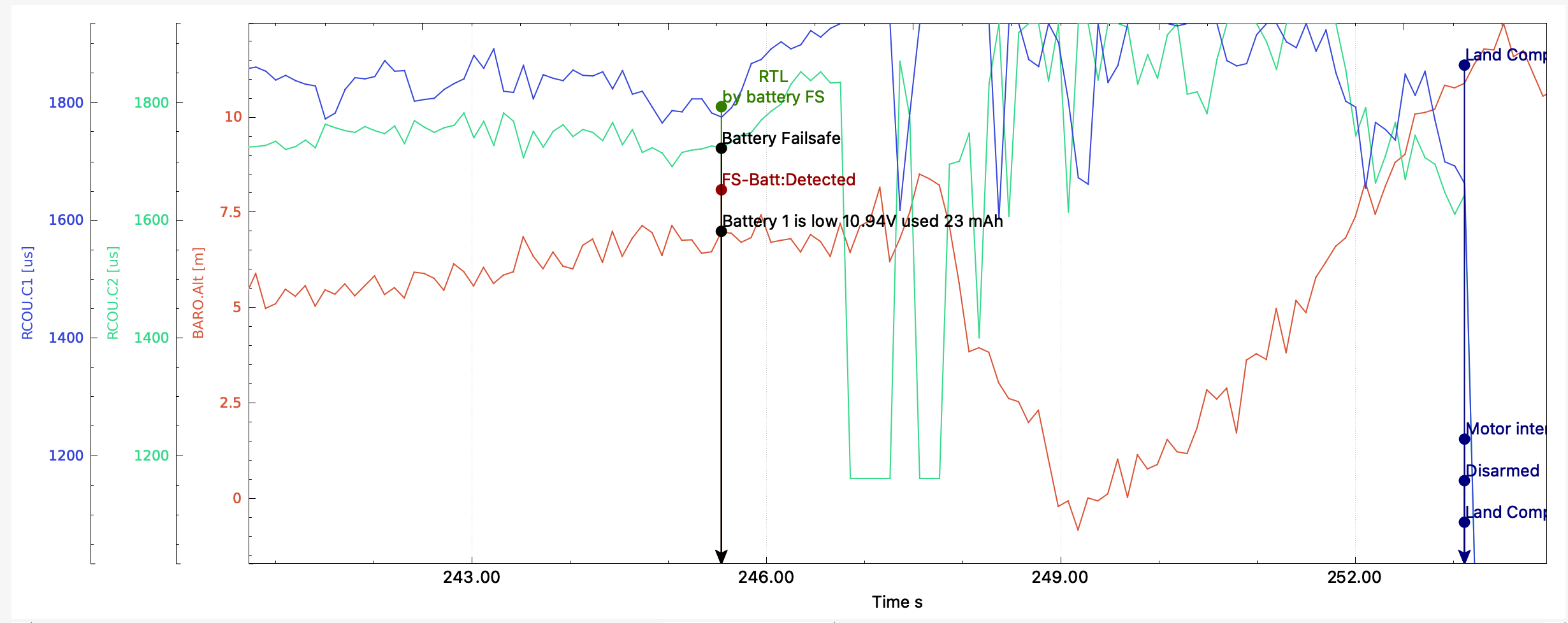
Overall, I’d say your motors aren’t balanced or aligned very well because 1 and 2 seem to be working significantly harder than 3 and 4.

Just before the quad descends motor 1 goes to max and 2 drops to minimum. This suggests that the motor or esc for #1 has failed. Then it comes back on, dies again, and comes back again. I don’t think it so much as landed, as it did just bounce off the ground as the motors came back online.
My suggestions:
- The alignment of your motors or frame needs to be checked.
- Motor/ESC 1 needs to be checked. Maybe it’s a wire issue. I can’t say.
- Fix your battery failsafes.
yes there is issue with esc and thank you very much for helping