Hi,
My quadcopter crashed during a mission yesterday, causing the battery to catch fire and burn half of the drone.
It was flying ok at the time, passing all my tests of auto mission with different speeds. I heard a “clack” sound right after switching to loiter when I wanted to land. The drone began loosing altitude quickly, behaving like one motor had failed (struggling to maintain level, mix of roll and pitch rotation, no throttle response).
I triggered the motor emergency switch right before it hit the ground. Then the battery caught on fire, causing some damage which did not allow me to see the cause of the problem.
After analyzing the logs, I would suspect a mechanical failure/ motor failure.
Could anyone help me confirm or dismiss this hypothesis ?
Log : V3-Rev0 Crash log - Google Drive
Drone :
- approx 680mm custom CF frame with 16" ultralight CF props
- FC is CubeOrange on AC v4.2.1
- ESC F45A from T-motor
- Antigravity 4006 380kv motors from T-motor
- 2xparallel 6S 3500mAh Li-Ion batteries
- Full configuration was finished, PIDs were not perfect since I wanted to optimize them after this flight
- No esc telemetry
Intersting timestamps :
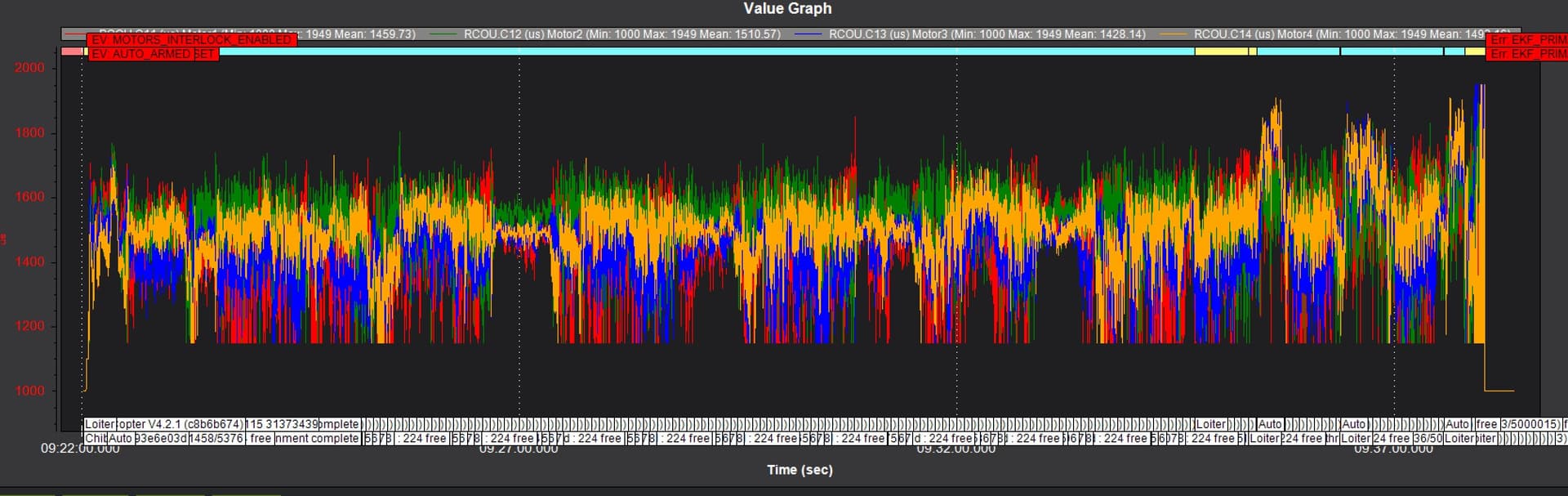
- Mission going smoothly from 15:22:04 to 15:37:00
- Switching to Loiter because battery voltage hits 19.0V at 15:37:47
- Right when switching to Loiter, I lower the throttle
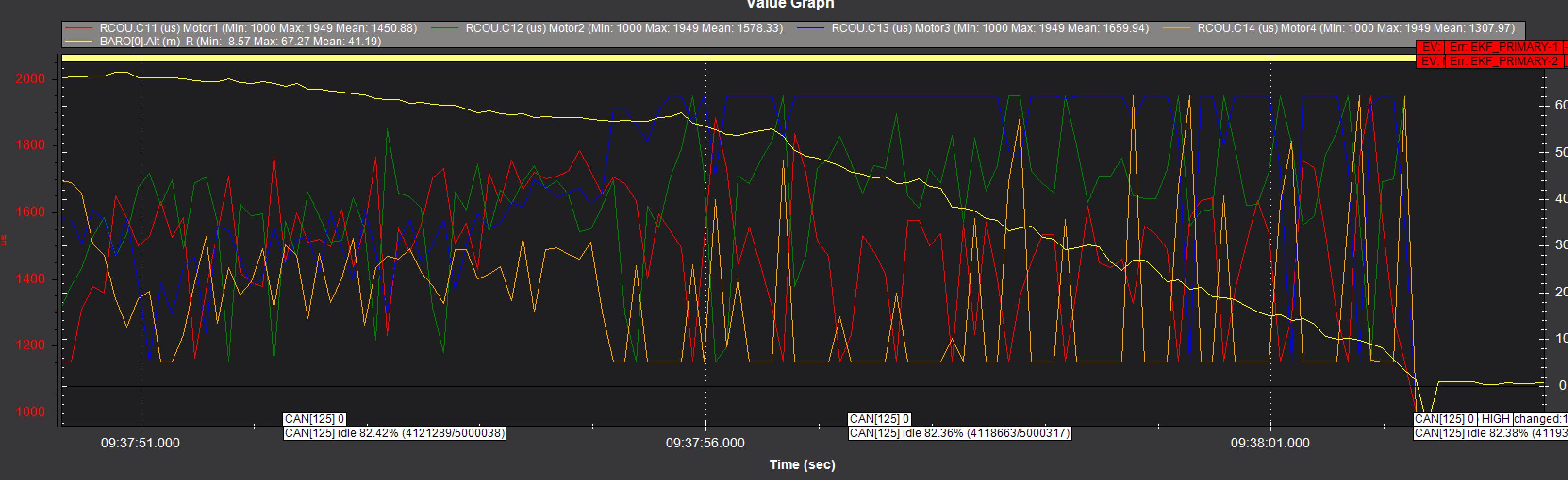
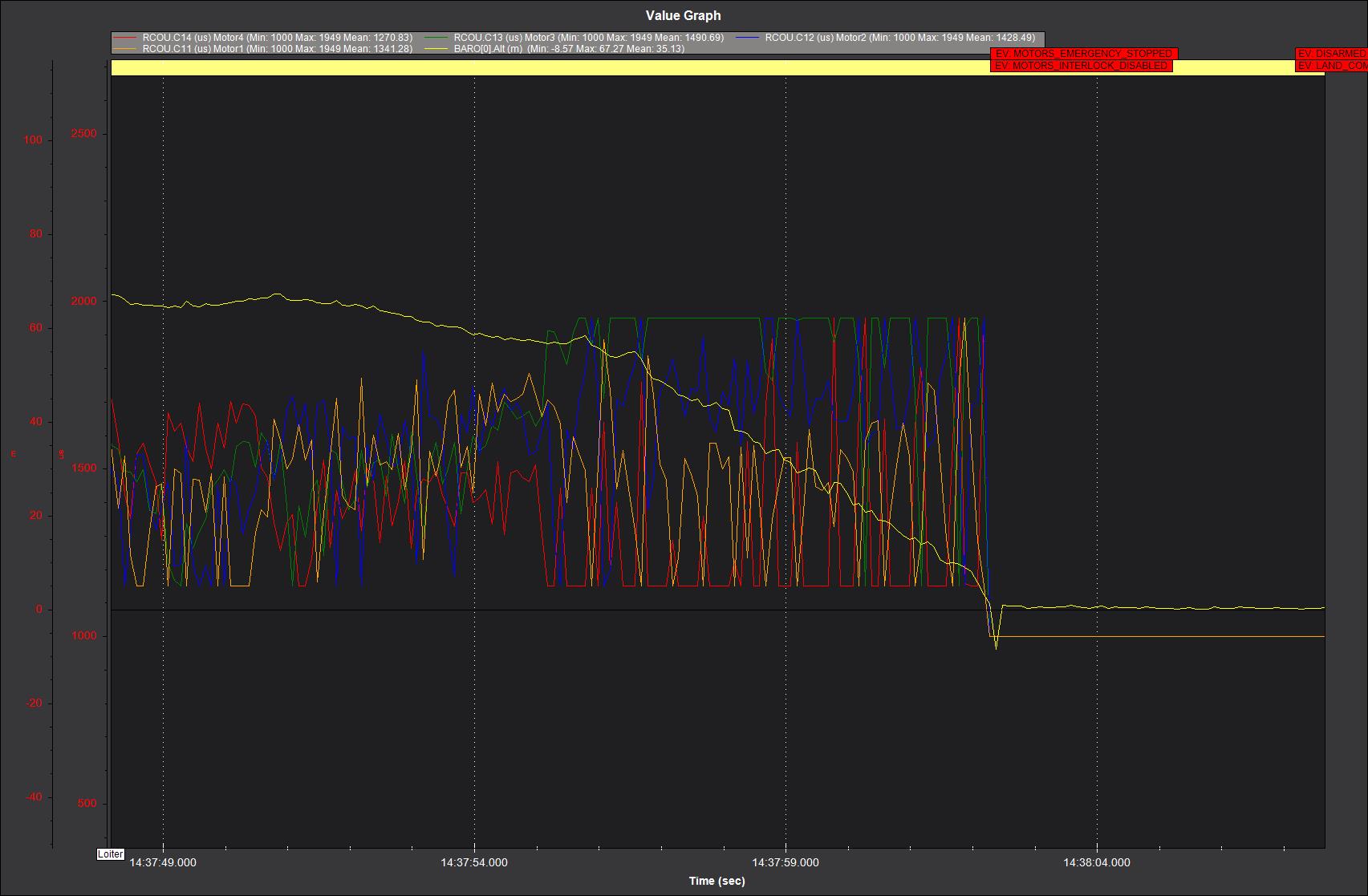
- After hearing the “clack” sound, I try to go full throttle to counter the fall at 15:37:55
- Drone hits the ground at 15:38:03
Log analysis so far :
- No messages from FC when falling (no “Thrust loss” message)
- Battery Voltage does not show any problematic value
- no particular EKF innovations or high variance
- Vibe is a bit high in Z direction, but it was a bit windy and I have not configured the harmonic notch filtering so I assumed it was okay during flights
- I have a hard time analysing RCOU: servo13/motor3 seems to saturate first, but I don’t know if it’s because the drone it compensating or because or arm/motor failure
- Right after the “clack” and before I go full throttle, Roll goes from 6° to -70° and Pitch from 8° to -28° which indicates a strong tilt to the front left whic could mean motor3 failure