I have a quadcopter equipped with a Pixhawk Cube Orange running firmware version 4.5.3.
I have followed all the steps from the initial setup through to AutoTune.
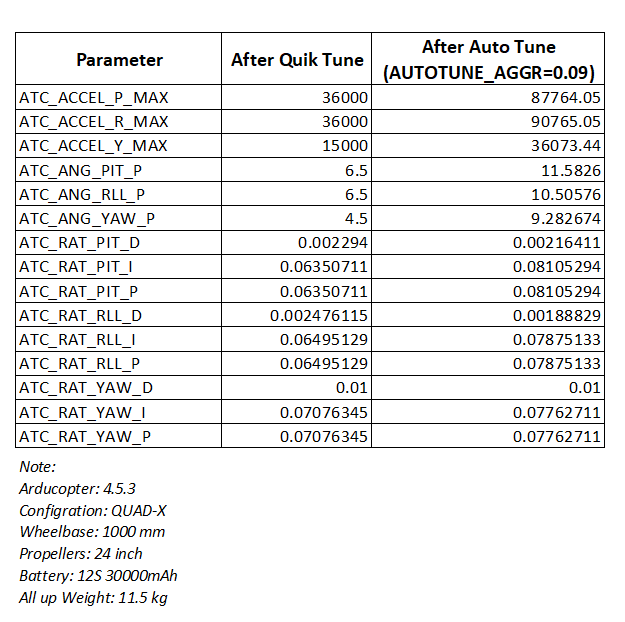
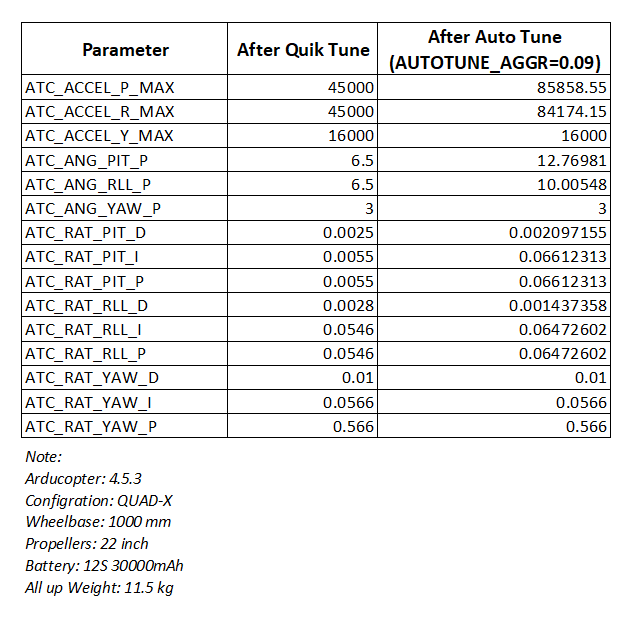
Attached are the tuning parameters obtained after Quick Tune and AutoTune.
The accelerations seem too aggressive for the size of quad I am using.
I would like to ask the experts: Is this tuning considered safe?
Should I reduce the acceleration values? If so, by what percentage? Additionally, will reducing these values affect the gains?
If the motors are not warm, and it feels steady, congratulations you have a tuned vehicle.
Now, like described in the documentation, what you need to do is input shaping so that it feels slower to you, but it still is fast to reject wind disturbances.
This is correct. It looks like you have a good tune. The next step is to make it feel the way you want it to feel.
ArduCopter lets you separate the way the aircraft is tuned from the way the aircraft feels to fly. This lets you have a very aggressive tune while at the same time having a docile and friendly aircraft to fly.
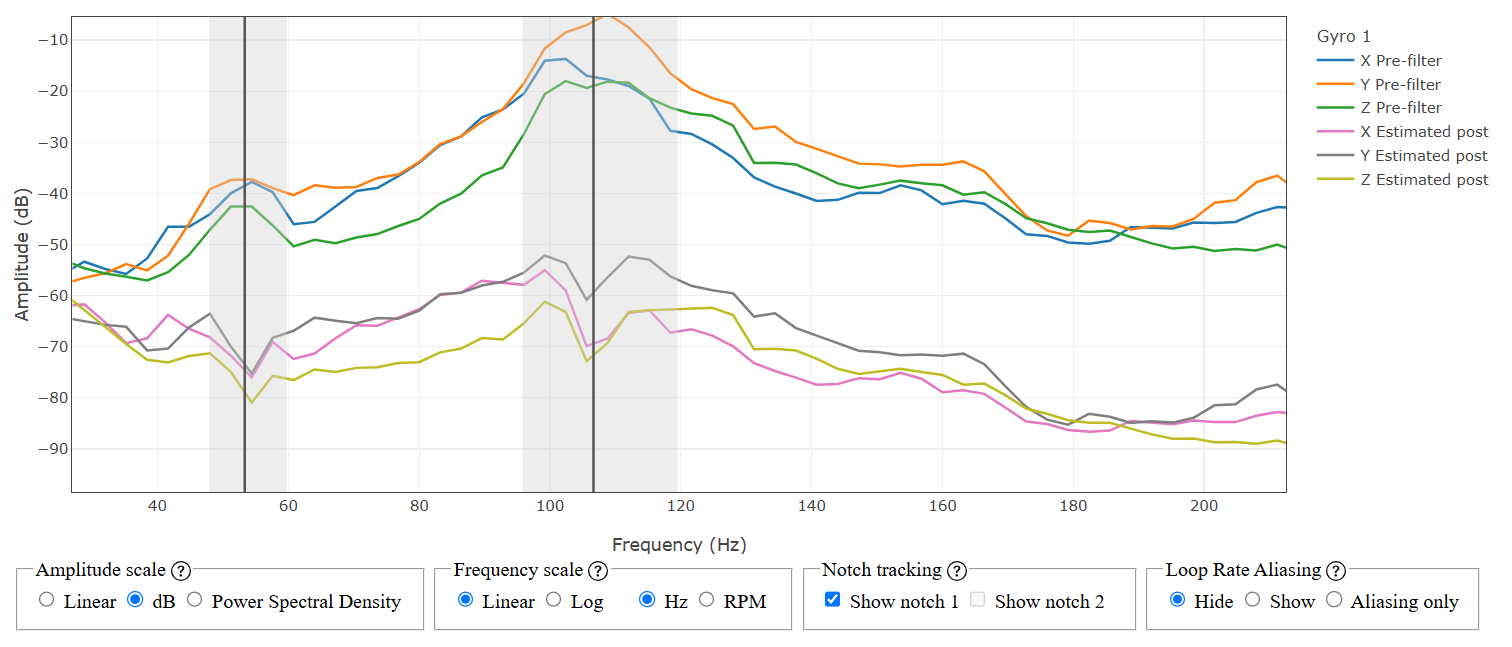
After the auto tune process, I take off the drone around 10 meters but after few normal roll inputs it starts visible vibration at high frequency and luckily I have landed the drone safely.
Attached is the log of the flight after the vehicle-2 auto tune flight.