From a control system and gain tuning perspective, is there any difference between the Quad-X and Quad-V configuration?
Does the Copter control method assume that the CoG will be relatively closely near the geometric centre of the rotors? Does it also assume the airframe moment of inertia will be relatively axi-symmetric?
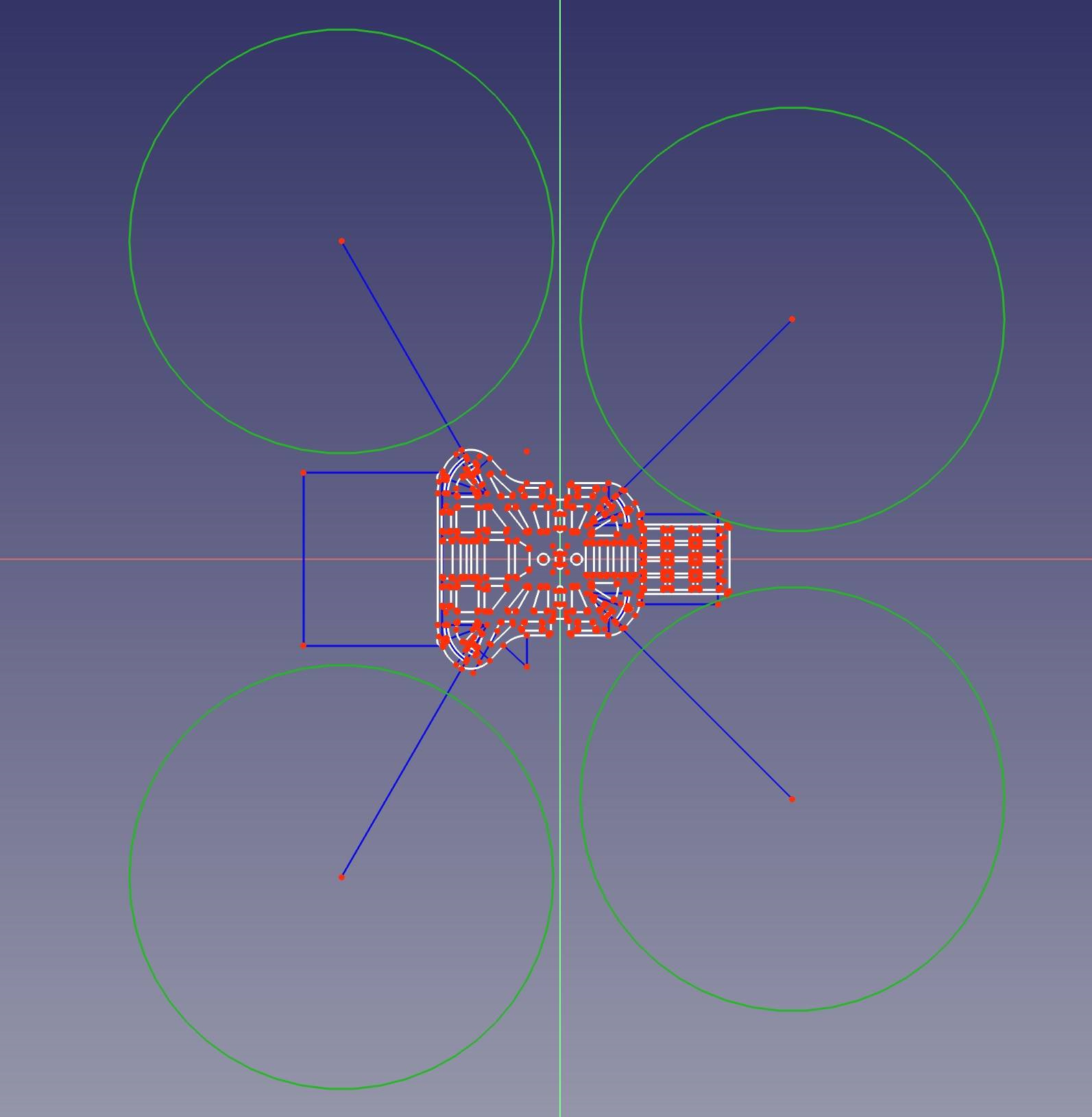
I am reviving this thread because I am planning to bring a “mild” Quad-V into the air.
To give you an idea: The distance between the front motors is about 32% wider than the distance between the rear motors. The distance between front and rear motors (in flight direction) is about the same as the distance between the rear motors:
The drone was tuned in X-shape successfully before it was modfied towards V-shape.
The first question now is, what would be recommended. I can leave the configuration of the frame type as “Quad-X” and just tune the pitch and roll PIDs seperately. But this would address the asymmetry only partially.
I could also change ArduCopter configuration of frame type to frame “Quad-V” but when I do this, I see no additional parameters in the “extended tuning” section that would address particular attributes of the “V-shape”.
So the question is, if anyone could give me hints for a successfull re-tuning. My idea is to start with the values of the X-shape. Would you expect P on the roll axis lower or higher to better adress the asymmetry?