I got mine to hover briefly yesterday, proving that motor direction Henry described is correct. Will attempt transition after I get some paints on it to distinguish top from bottom. Thanks for the feedback gentlemen!
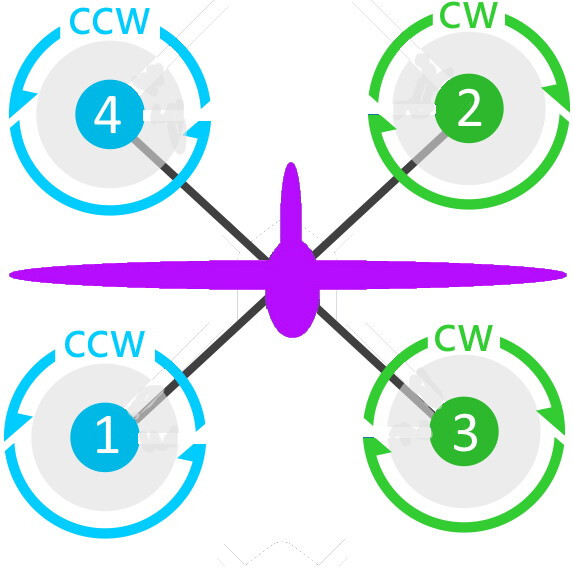
just follow this diagram. The recent picture I posted does not have the props properly installed. they were just for show, i usually take them off and put them back one every flight lol. If you have the opposite of this exact picture I posted it will provide the same torque roll you need. props in or props out does not matter. But it is known that the props out provide better yaw response and a little bit better efficiency(due to capturing capturing turbulant air from the frame). But this frame has both.
Thats my understanding as well. I got the new parm file from Ricks page, Thanks.
Getting my Red Bull on.

1 Like
Thanks Janno. That’s what I thought. Then how does Farkhod_Khikmatov’s image showing a mix of props-in and props-out not end in disaster? Doesn’t it have to be one or the other for the controller to know what to do in order to get the desired yaw? I’m so confused. ![]()

Very cool. If those were Campbell soup cans they could pass as a Warhol piece!
Actually he had plenty of coca cola art!
1 Like
Hey Kevin. I was able to get a successful flight with both the quadx configuration and NYT quadx. I am not sure how but both of them worked lol. I can send you video proof too if you want lol.
No need for a video lol. Hey if it’s working for you, great.
1 Like
Hey guys
I have had a number of requests for access to the STLs for my H wing VTOL.
I am wondering if anyone other then @Farkhod_Khikmatov is building it. Curious how it’s going.
@Farkhod_Khikmatov has been pretty successful so far. good for him. wa hoooo.
But just curious if others have tried.
cheers
I’m thinking about because I already have some parts, but want to check the exact performance of my old’s 2212 920kv before to know if it can carry it with my 4s 5000mah (if yes, I’ll have to try to modify the STL’s to fit this battery).
I can tell you that it was designed for those motors.
A friend has the original machine and sent me a photo of the motors. So I used them in the design.
Cheers
I know, however it’s a very cheap brand and I plan to use a bigger battery, so it must be able to handle it’s weight, this is why I want to check before.
1 Like
As @rickyg32 told me the H-wing use 2212 motors, I tested my old and cheap 2212 920kv.
It may be interesting for those who are building the Cygnet to have thrust data, or even a rough idea of it if they use motors from another brand.

Note that the advice at the end of the video is to obtain performance for a classic drone at hovering, for a VTOL like the Cygnet, hovering performance is less important than in forward flight.
Despite it, it still must be good enough to takeoff and transition…
PS : Endurance isn’t only related to motor/prop efficiency, 8g/w with a battery which allow to spend 2000mah (note the “allow to spend” meaning it’s not the battery capacity directly), will offer less flight time than 5g/w with 4000mah. So you need to find where is the limit when the additional battery size, due to it’s weight, induce a loss of efficiency that stop to be compensated by additional carried energy.
1 Like
Hello ricky, I went to read firmware limitation about Mamba F405 and follow_me, saw the pixracer also have some (List of Firmware Limitations by Board — Copter documentation) and remember your post about it when I saw this:
“VTOL Frame -QUAD -No -QUADS(BI,TRI also)”
Meaning the pixracer is impossible to use for a VTOL (so with the cygnet as you intended) or I’m wrong?
Hey there.
I am not sure about the limitations, but I had no issue installing VTOL firmware on the Pixracer.
I see there is a limitation on the mRoPixracerPro-bdshot what ever that is.
But the regular pixracer pro has no limitation that I can see.
So I misunderstand the firmware limitations, of it’s simply incorrect, glad to know.
definitely an issue with the wiki limitations page generation…Pixracer std firmware has all frames…we are investigating…also Mamba405 cant be anything other than a control surfaceless copter quadplane…not enough outputs (5)
1 Like
Has anyone else tried building this bird other then @Farkhod_Khikmatov
Wondering how your making out.
Your bird is simply awesome, it’s a very simple vtol that is on my opinion equally well designed than Explora of Marco Robustini.
However it’s not that much easy to build a vtol for most of people and it had a very specific use due to very limited use in hovering mode, I personally prefer to try to design a very light tri/quad.
It’s probably why few tried it but your design isn’t the reason, more probably visibility is the limit.
I’m totally sure that if you post it on thingiverse or even sale your design on cults3d a lot people will like and few will build.
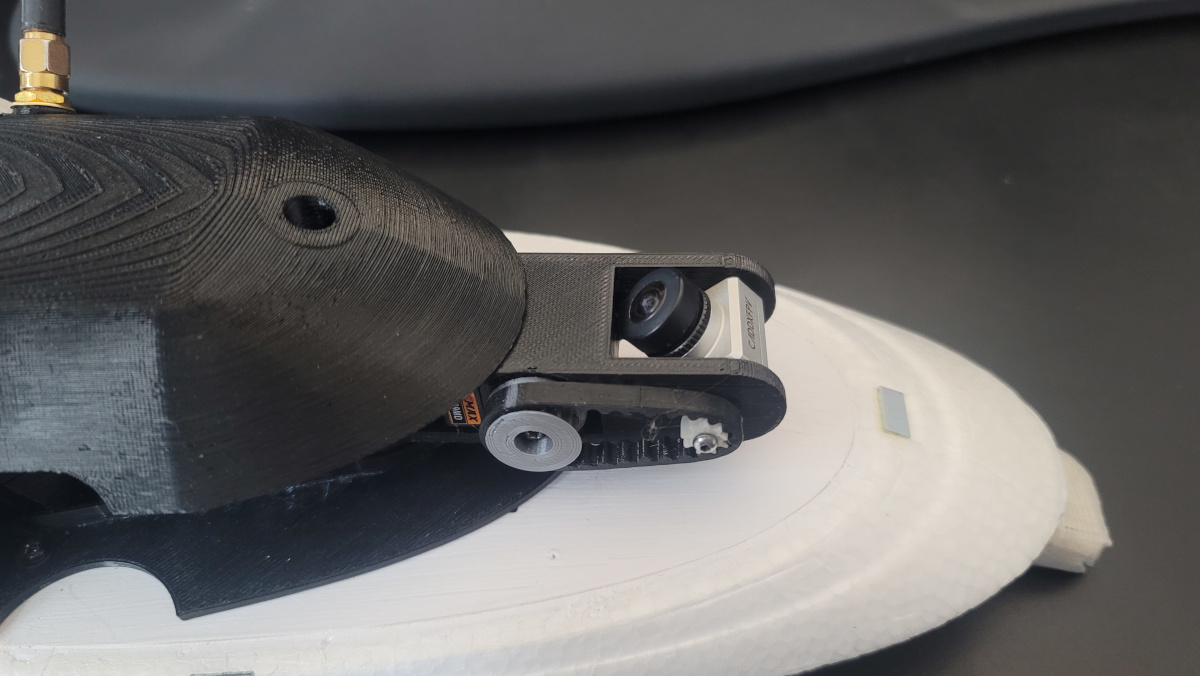
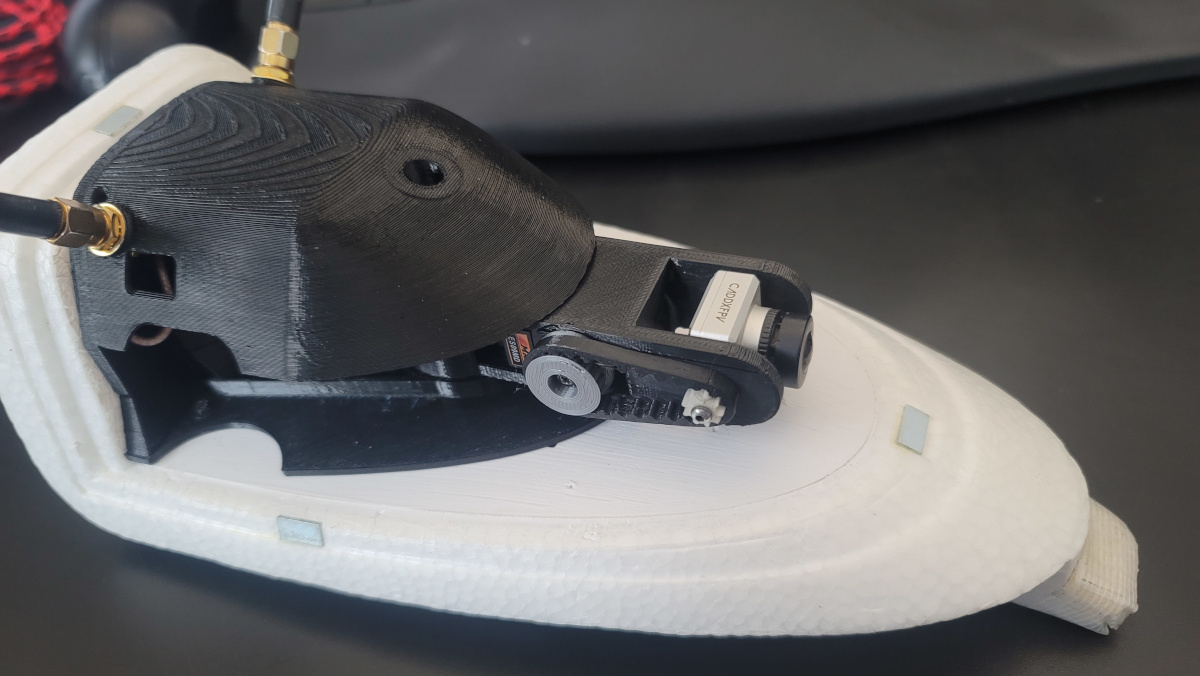
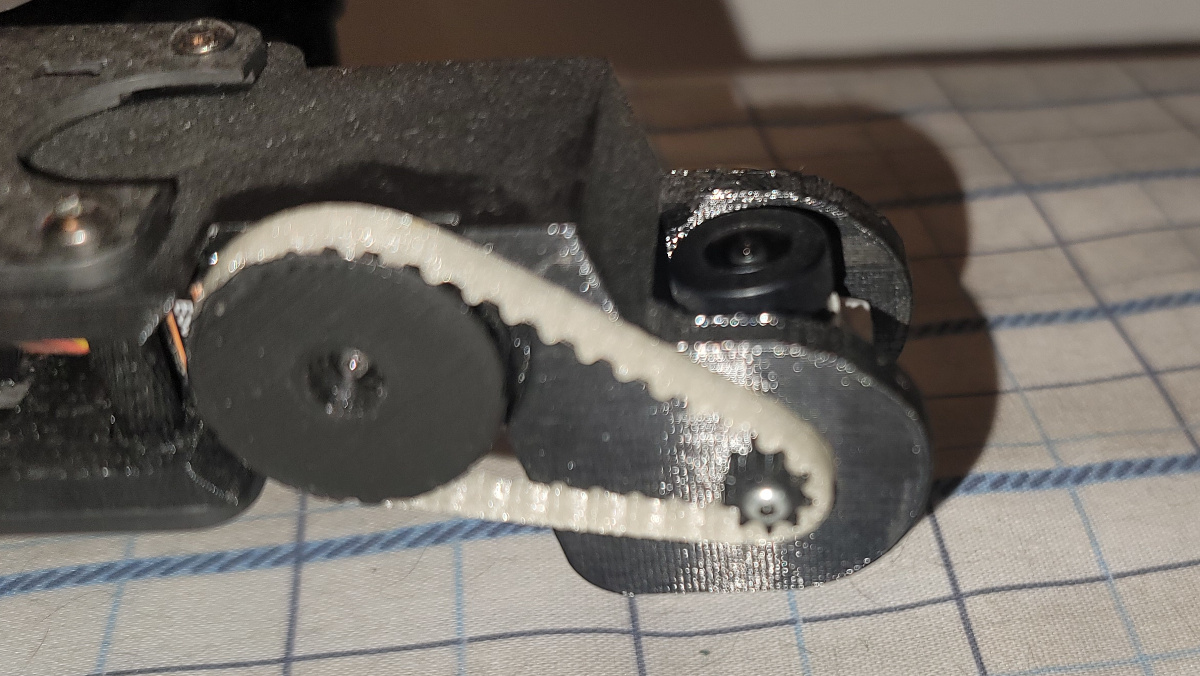
If you are talking about improving visibility for FPV while in hover mode, the nose could likely be modified to include a setup like I’ve created for my 7" quads or SonicModell Binary. It provides up to 270 degrees of travel on the camera’s pitch axis. This would easily allow for a 45+ degree downward view toward the bottom of the of the nose/belly of this Tailsitter while in a hover. I use PETG or PLA for the sprockets and TPU for the belts. For this application, you could also use a radio mix to change the center point of the camera position for hover/flight mode so you don’t need to do gymnastics if using a head tracker to control the camera. ![]()
See pics: