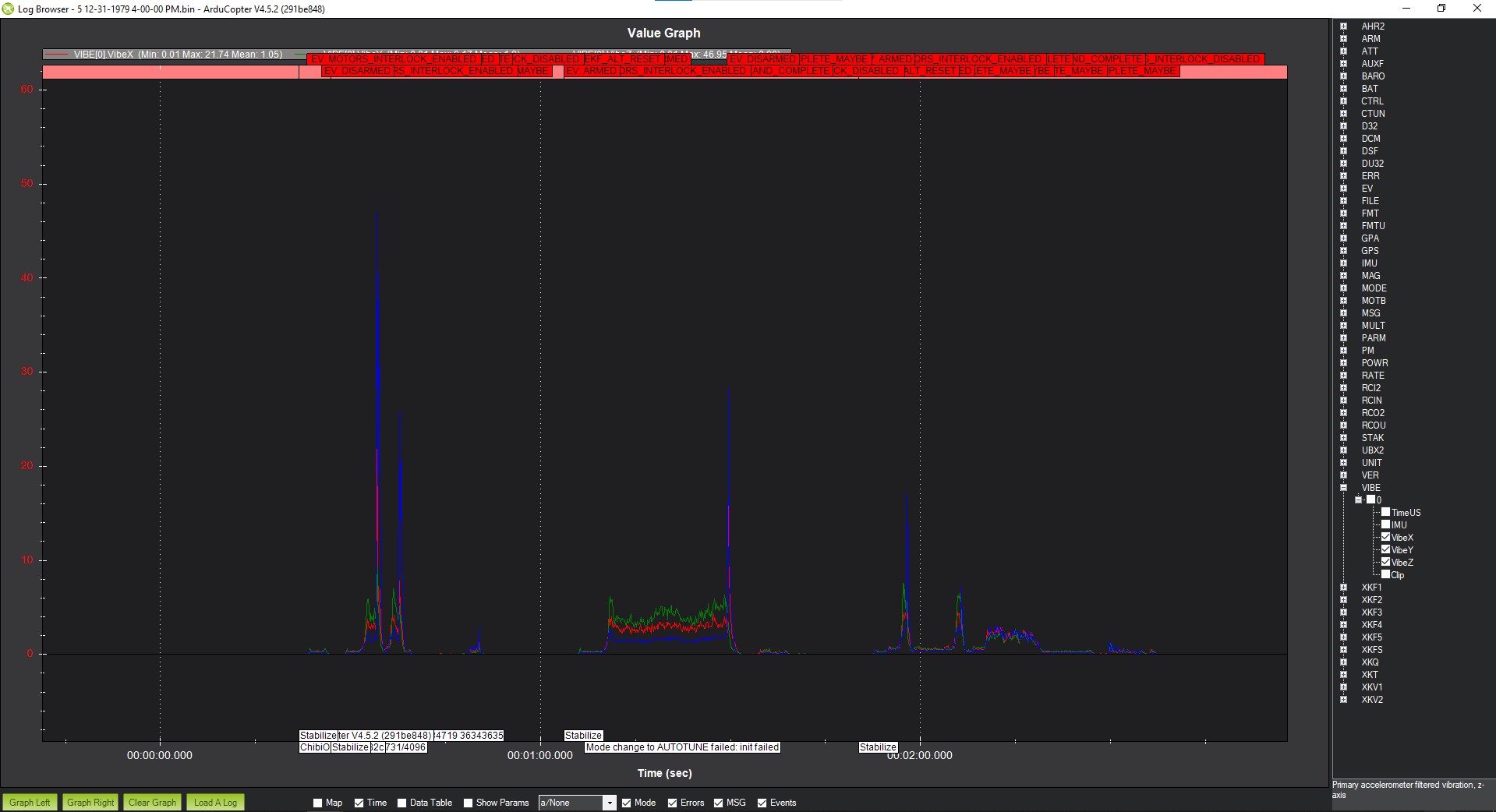
Just finished a 7-inch quad with ArduCopter 4.5.2, and I’m facing an annoying issue: The Quad shakes a lot after takeoff and the motors get so hot.
I loaded BetaFlight, and the Quad flew smoothly; but after re-loading ArduPilot, the shakes came back.
Even after relocating the Compass/GPS module and keeping it at the farthest distance, no improvement was reached.
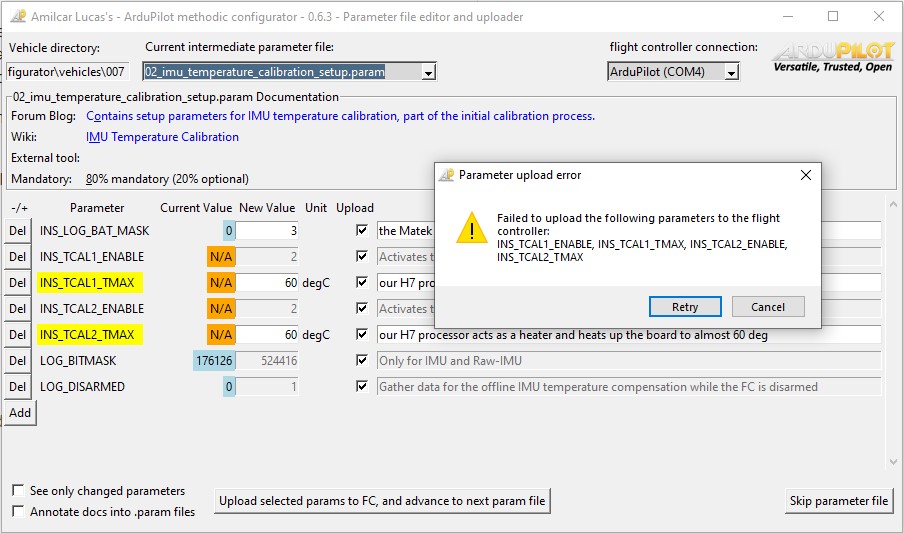
Use ArduPilot Methodic Configurator software to configure it properly and the motors will no longer get hot and it will fly like it should.
WARNING: the software will NOT auto-magicaly fix the problems for you, it will help you by guiding you thru a sequence of steps and by pointing you to the relevant documentation for each step.
You still need to be the one that fixes the issues.
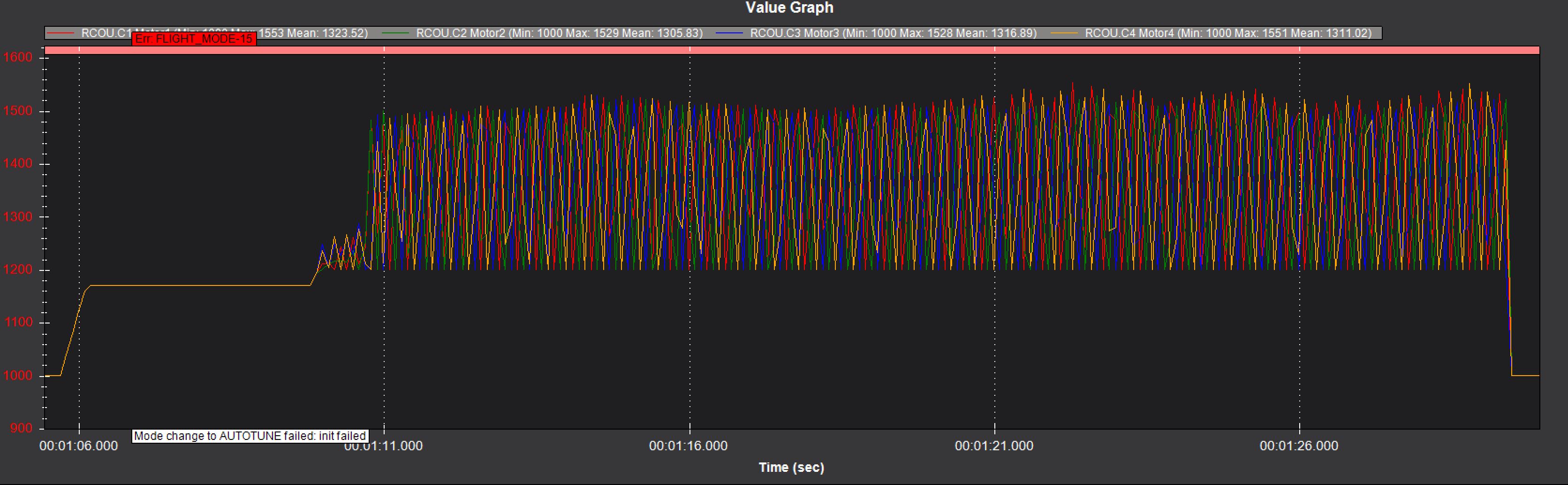
I see you attempted to run Auto Tune in this state of tune. Way premature and it won’t complete if it did work… The 1st thing you should do is reduce the ATC_Rat Pitch and Roll PID values by half.
But, you need to follow a tuning procedure. Do those ESC’s support BLHeli_S or _32? If so you should be using the Bdshot version of firmware and configure for Bdshot. The notch filter needs to be set. Among others things…
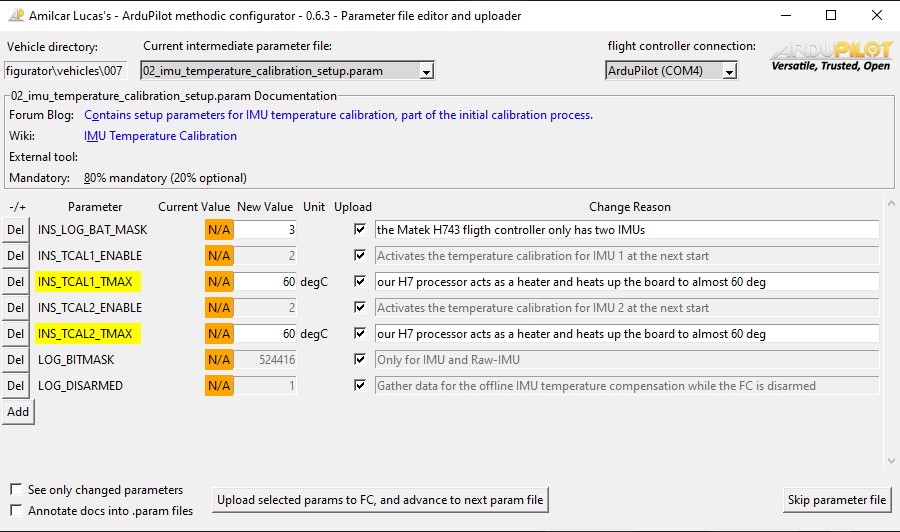
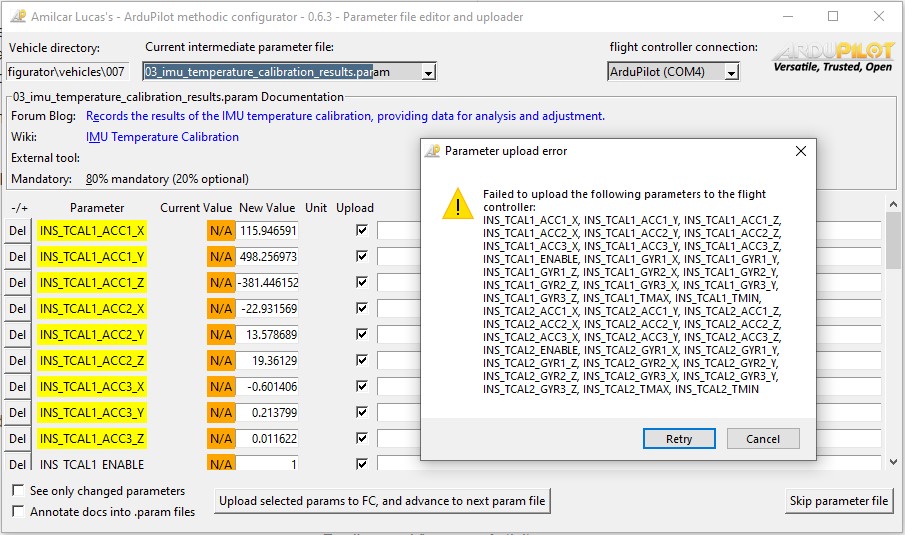
That pre-loaded data are recommendations on new parameter values, if you do not agree with them, copy the value from the FC (current value) into the new value and edit the change reason explaining why you feel that that particular value is the correct one for your vehicle and use case.
In the particular case of 02_imu_temperature_setup.param the recommendations are all better than your current values.
Any greyed out parameters are an absolute requirement for that particular step and you need them.