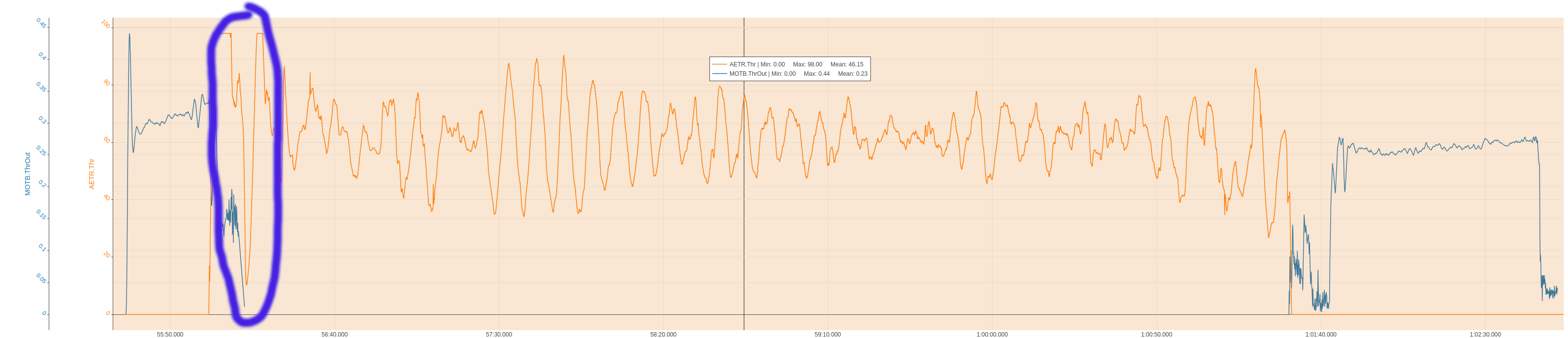
Was flying a quad-plane the other day and experienced a strange drop in the fixed-wing throttle during the takeoff transition. Here’s a screenshot from the log where I’ve plotted both the fixed-wing throttle output (orange) and the VTOL motor output (blue). And then I’ve circled the “strange” moment in blue.
Additionally, here is a link to the flight log so you can take a look at things yourself:
(Ignore the small hop flight at the beginning of the log in QLoiter mode)
Additional things to note:
- This occurred almost simultaneously with the quad motors shutting off
- This is after a recent update to 4.4.1
- This was a fully autonomous flight
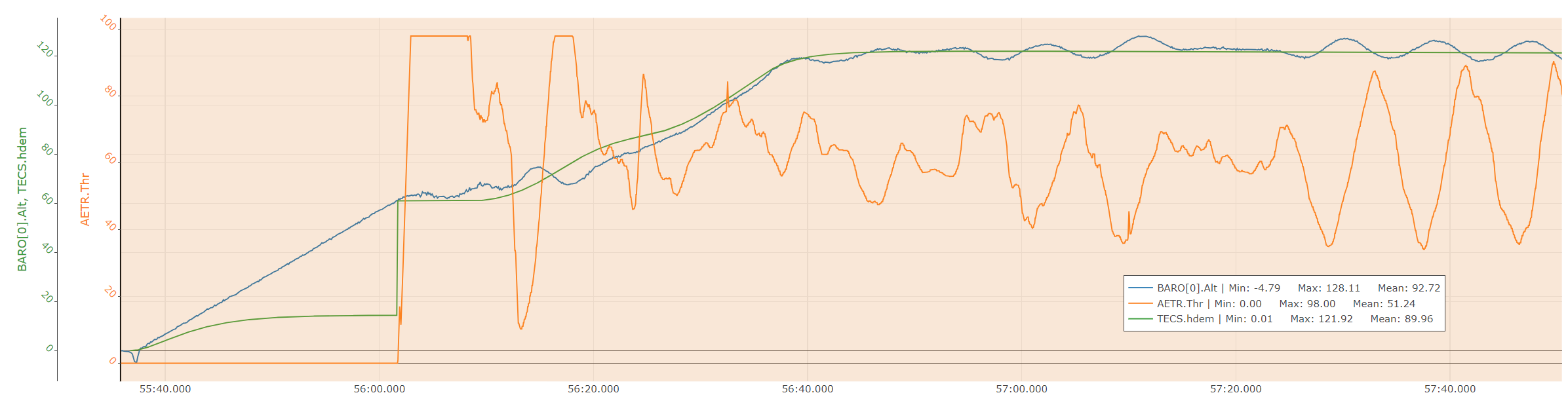
- The waypoint following the transition was set with an altitude of 400 ft. and the aircraft hadn’t reached that altitude yet, so my assumption is that the motor should have remained on so that the aircraft could continue climbing to the desired altitude, but if you look at the altitude it definitely dropped significantly when the motor shut off.
Not sure if this is a possible bug? Or what could have caused this. Any help or thoughts would be appreciated!
Could this be related to this post? QuadPlane VTOL loses altitude during transition from VTOL to Fixed Wing - I know it isn’t the same issue, but could it be caused by the TECS updates that were put in 4.4.1?