I’ll look into the twisted motor mounts. As for the IMUs, I’m not sure what’s going on. Sometimes it says I have 3 compasses and other times it says I only have 2. Is that at all related? It also makes me recalibrate the compass pretty often, but that’s probably because I’m mostly working indoors right now.
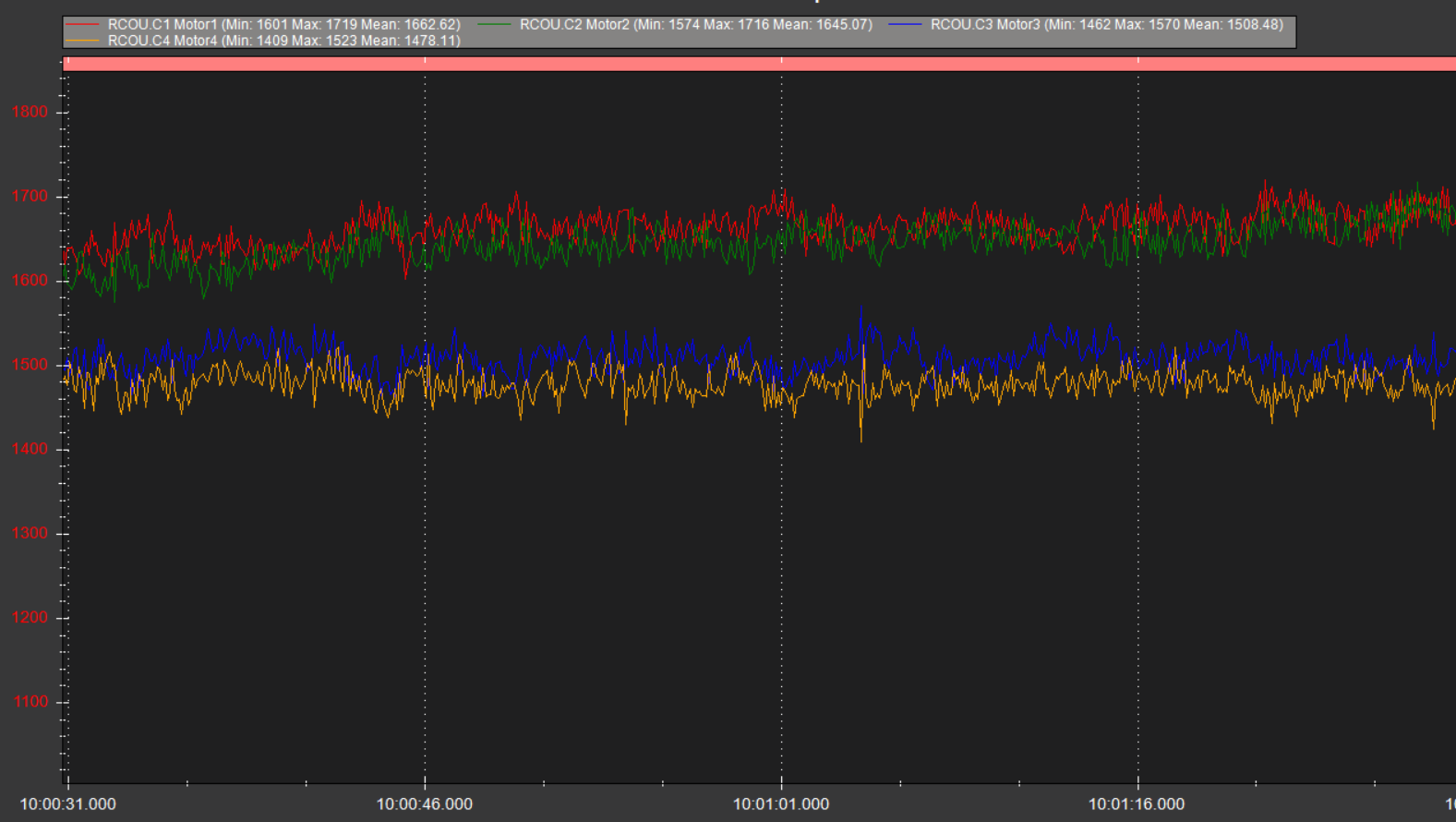
Also, could you explain that graph? In a healthy quad, would all 4 lines be overlapping?
Yes the motor outputs should be approximately equal when the quad is not moving laterally or fighting wind.
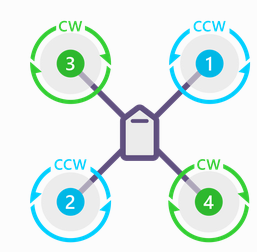
I can tell it’s twisted motor mounts, and not just a weight imbalance, because of your frame config and motor order.
I’ve been messing with the motor mounts and I can’t get the graph to look right. I’ve put a level on the motor mounts and they’re all less than 2 degrees off. The quad flies fine, with a few minor wobbles. I might just go ahead with the autotune and see how stable I can get it with that.
Also, what is the y axis on that graph? Is it motor rpm? Or something else?
The Y axis on that graph is equivalent to PWM, and the typical range is 1000 to 2000. So hovering would ideally be around 1500 PWM.
If you use DSHOT or some other ESC protocol, it’s range and format is mapped to a standard PWM range for logging purposes. For example a DSHOT throttle command of 50% would show as about 1500 PWM.