We use 1047 propellers. I tried autotune but i had an error “AutoTune: failing to level, manual tune may be req”.
We didnt see any oscillations so we have done mission flights and then follow me mode.
I also set PSC_ACCZ_I and PSC_ACCZ_P values but after that we changed the battery with another different weighted battery so those malues may needed to set again.
Your copter is untuned. You demanded more of the default control gains than it could handle, and it crashed. Not much of a surprise, and video almost never helps narrow the root cause.
Start here and go through every configuration step:
Thanks for tuning reccommendations but can anyone help with the reason for sudden crash?
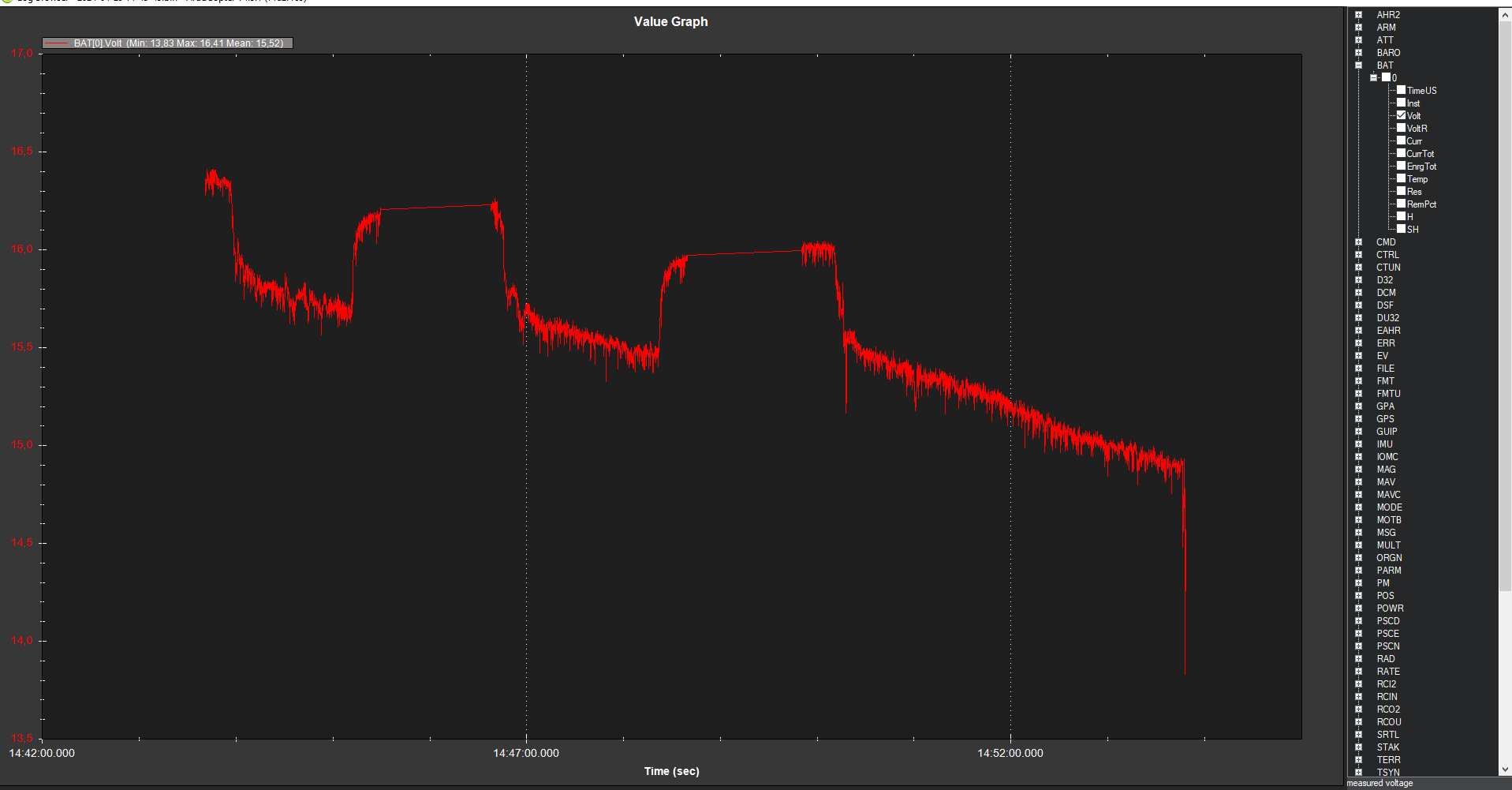
I think fine tuning is necessary but first i have to fly drone first. In first 3.5 minutes quad didn’t make any oscillations or disturbing vibrations. Here is a screenshot of bat volt graph from log file. Battery voltage dropped 13.8V suddenly. What could be the reason for this?
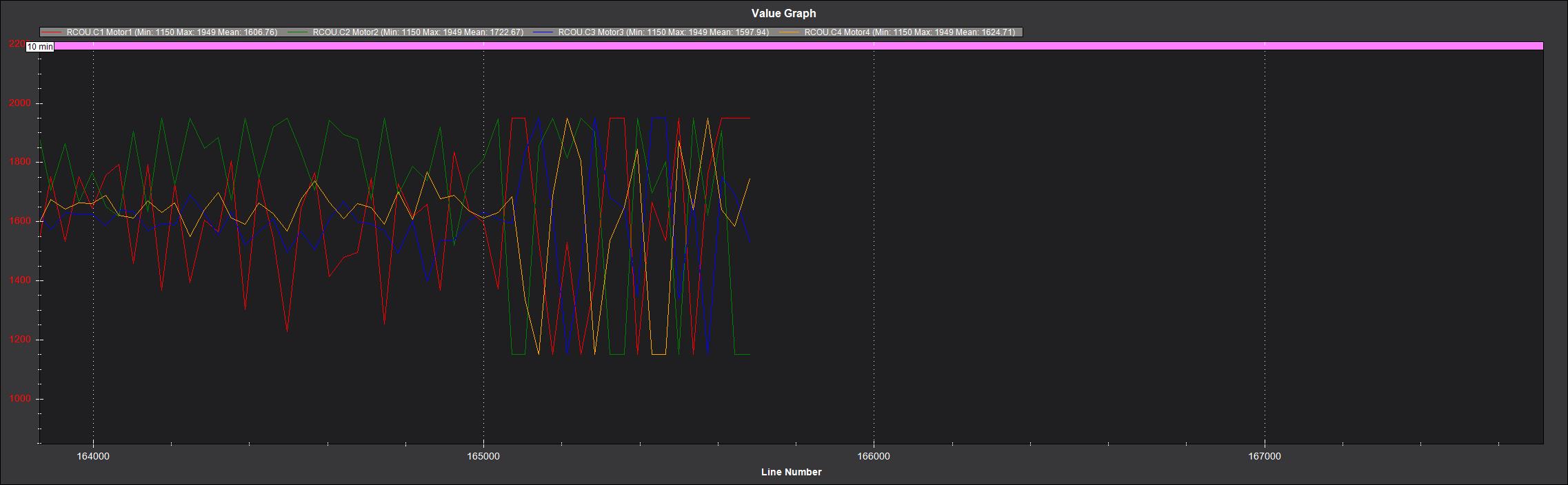
your quad is really badly tuned its barely flying but I think the cause of the crash was motor or ESC failure. The quad tips forward and to the right, that would be consistent with motor 1 failing. the log also shows motor 1 going to maximum as it starts to fall.
You motor outputs are not uniform, have you calibrated your ESCs? or are the arms twisted?
@Yuri_Rage
Battery was a brandnew 13000mah 25C 1Kg battery.
I calibrated 3DR power module analog readings by measuring battery voltage and i activated battery failsafe.
You can see from the screenshot battery was at 15.00 Volts and suddenly dipped to 13.8 volts.
That could also indicate a short in the ESC or motor, supporting @geofrancis analysis of motor failure. But the slope of that line is pretty steep even before failure.
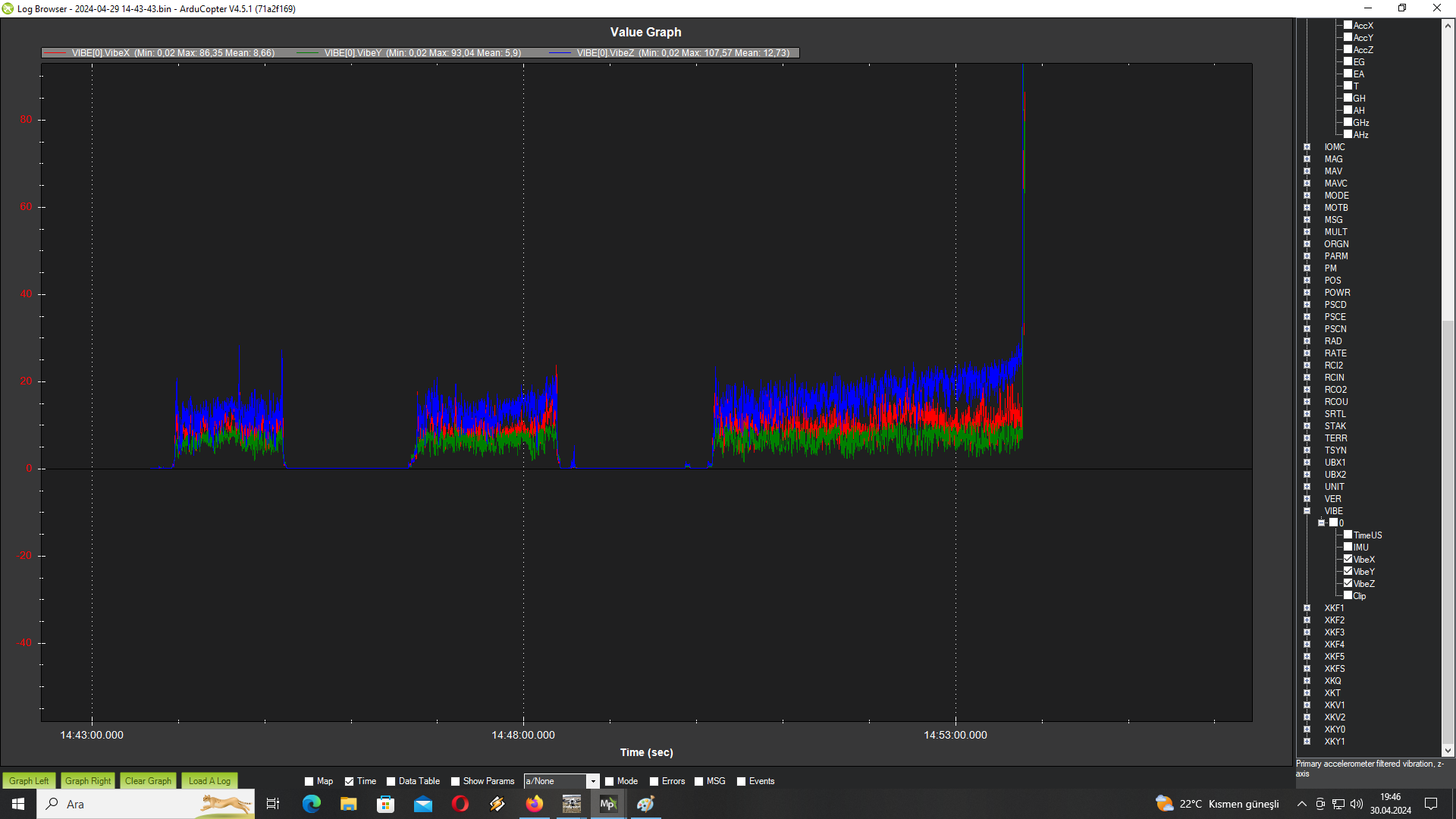
Vibes are ok but could be improved. Check prop balance and secure all loose wiring.
@geofrancis
Thank you very much for reply.
Yes I calibrated ESCs. I will change ESC’s and motors and will try again.
I cant finish autotune because “AutoTune: failing to level, manual tune may be req” message.
does the frame have round arms? check they are not twisted,
check the propeller is mounted securely,
check there are no screws going into the motor wires,
check the screws going into the motor arent too long and damaging the windings.
Also, after the accident, I reassembled the drone and the motors and escs were working. But the escs and motors are old, so I think I will have to install new ones and try them.
The frame is f450.
I checked the screws touching the motor windings. I checked the cable connections. I also checked whether the propellers were connected correctly. But one thing that caught my attention was that engines number 3 and 4 were getting hotter than the others.