Yesterday, we trailed out our agriculture spraying drone. the morning we took some 2 trials it was good. in the evening, the drone flipped and crashed on the first flight while take-off itself. As I know, I removed the throttle stick immediately after being armed. I attached the log for your reference; kindly review it and comment. It is a V-quad type drone and its takeoff weight is nearly 42kgs(with payload).
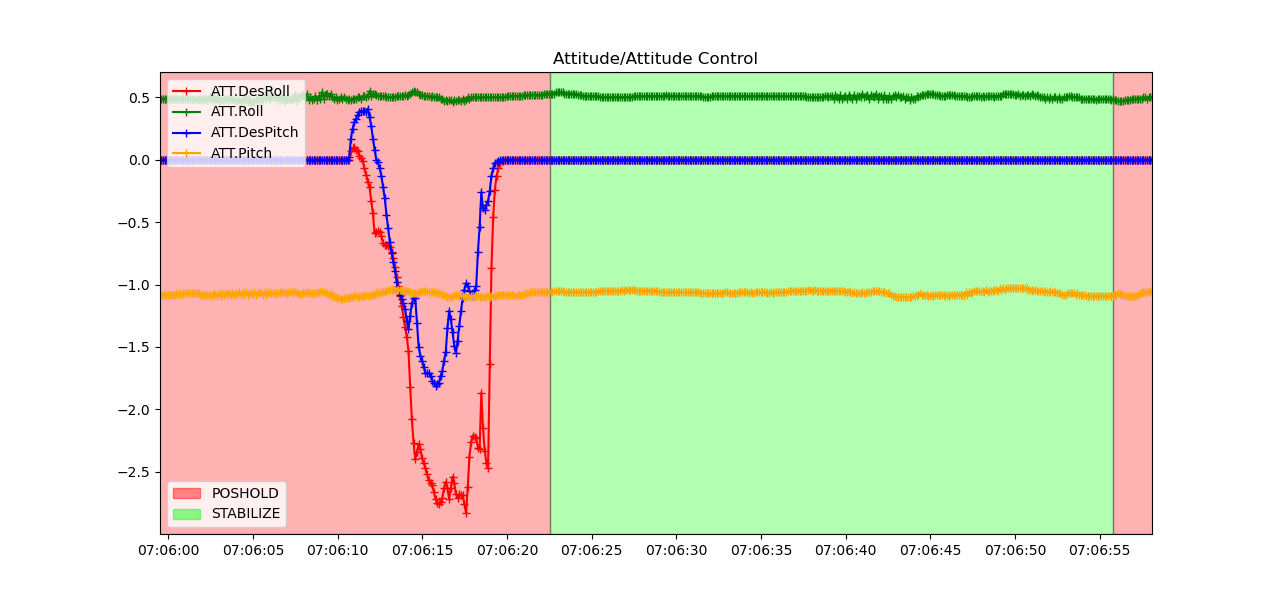
Were the previous flights without payload? This log shows the motor outputs to max and no change in Altitude. It doesn’t show evidence of it flipping either, Pitch and Roll are <5°. And, where is your battery logging?"
Also, you should update the firmware to latest Stable.
Is this really V frame? Usually what’s thought to be V will fly better on X.
Hello Dave,
Thanks for the quick response.
I added a link for the morning flight log also for your reference, the log has with and without payload flight data.
Waiting for your reply.
Hello Dave,
Have a good day.
Today I took one test trial after that crash, the behavior was somewhat the same. The drone flipped on the left side(last time backside). This time I noticed the GPS color changed while takeoff(green to yellow) I attached today’s log also for your reference. Please let me know your comments. I am monitoring the battery voltage using Arduino because the 12S power module is not available. please suggest a 12S power module suitable for cube orange. Waiting for your reply.
Thanks
Log link: 00000053.BIN - Google Drive
Video link: Drone_crash_2023-05-23.mp4 - Google Drive
That log file doesn’t seem to line up with the video. In Log 53 I don’t see any there where the drone is pitching over or even really moving.
In Log 51 there I can see the quad needs better tuning. It could also use the notch filter setup.
If an otherwise flyable quad suddenly starts to flip over like that, it’s not going to be a firmware issue (unless you changed something between flights). Make sure all your motors are working, and the props are installed correctly and in the right direction. I couldn’t see in the video how those props were mounted but if it’s possible make sure that none are lose.
The log doesn’t match the video (what Allister said). The log shows all motor outputs going to max with thrust loss errors and it’s not taking off.
What motors and props?
And, don’t take-off in Position Hold. In fact don’t use Position Hold for anything. You should be using Stabilize until this craft will actually fly.
There are plenty of Power modules around for 12S. Holybro for one makes them. You need battery logging or these parameters do nothing:
MOT_BAT_VOLT_MAX,50.4
MOT_BAT_VOLT_MIN,39.6
Thanks dave and alister,
As you guys said, in first few minutes I armed in the vehicle in poshold without props. But, after sometime I attached the props properly and I did a flight. Please check last few seconds of the log 53.
The last few seconds of log 53 are much as you see them. The only thing I noticed was the motor outputs all climb at the end of the log, then the file ends.
You are wasting peoples time that are volunteering to help you. Read the replies you get and answer the questions and follow the guidance given. The forum is here to help you help yourself to solve a problem…
Hello Dave,
Sorry for the inconvenience, Today I changed GPS, and all calibrations were done again(Compass, ESC, and RC). The first time took off, it was proper but went right side automatically, and then I landed. After that again tried and it crashed. I attached the log and video file for your reference. Please check my log and give your feedback.
while crash, EKF3 lane switch: 2 and EKF primary changed: 2
I would say motor order is wrong.
First, what motors, props and ESCs do you have (exactly)?
These will need adjusting based on that answer
MOT_PWM_MAX
MOT_PWM_MIN
MOT_SPIN_ARM
MOT_SPIN_MIN
MOT_THST_EXPO
Once MOT_PWM_MAX and MOT_PWM_MIN are determined, you may need to run the ESC calibration.
Then you can go back to motor test and check the order and spin directions, and set MOT_SPIN_ARM and MOT_SPIN_MIN correctly too.
There is no battery voltage monitoring - you will NEED that before attempting any more flights - it’s quite important for safety and for motor thrust scaling (tuning).
Once you have battery voltage monitoring working, reconnect to MissionPlanner Initial Parameters and put in your battery cell count and prop size, select “Suggested Settings” , press Calculate then accept everything it offers.
Then set these:
INS_ACCEL_FILTER,10
INS_HNTCH_ENABLE,1 // set this then refresh params to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.2
INS_HNTCH_FREQ,30
INS_HNTCH_BW,15
INS_HNTCH_FM_RAT,0.7
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
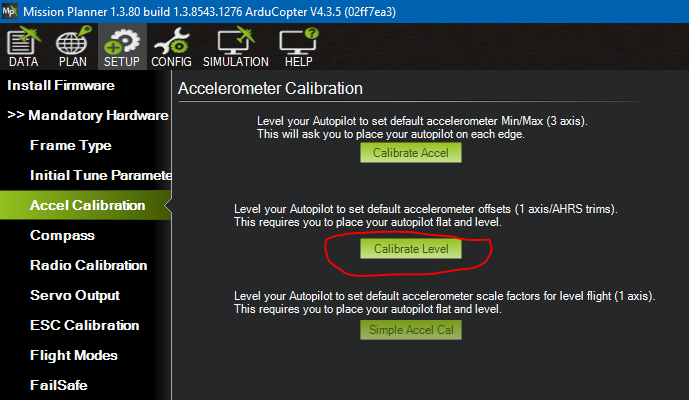
Also set the copter perfectly level (just putting it on a surface that you think is level is usually not good enough) then do Calibrat Level in MissionPlanner
After all that it might be ready for another test flight - but please come back with those answers so I can help with some of those parameters before you go further.