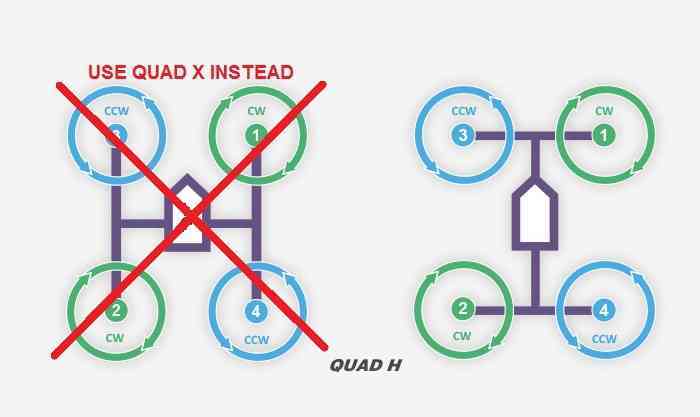
Quad Copter, H-Frame configuration.
The software setup now says configure the CW, CCW propellers (prop) to throw all the thrust into one point, the center of the frame, on top of the controller, in the location of the center-of-gravity (CG).
Have a number of H frame quads that rotate, the other direction, such as to dump the thrust away from the CG, as far out as possible.
Seems like this diagram is wrong, mostly because it won’t fly this way.
Needs the props rotating the other way to be stable, spread the thrust out, not on top of each other.
Anyone have a different experience?