I do understand ALL of the variables, and I also know what the manufacturer’s specifications mean. Those motors are not rated for 4S. End of story.
As for going with lower Kv motors and longer props, we have no idea how big the current frame is, and until we do, any thing we say is speculation and totally worthless.
I just love it when people ignore the specs and then complain when their stuff doesn’t work. I have seen this with automobiles, motorcycles, race cars (I used to race SCCA), computers (former Microsoft employee with a degree in Computer Electronics Technology), and particularly in this hobby which I have enjoyed for going on 30 years.
When someone like me comes along and gives them a simple solution their pride gets in the way, their feelings get hurt, the lower lip comes out, and they totally ignore you. Then they inevitably come back crying because either all of the magic smoke came out, or the aircraft re-kitted itself. If it wasn’t so sad it would be hilarious.
Like I said earlier, Y’All have fun chasing your tails…
And 8 inch props are in the reccomended ones too. So i guess using 8 inch props and 4S batteries would be in spec and probably performing well and at higher efficiency than on 3S.
No pride getting in the way here, just giving options INSIDE manufacturer recommendations.
I too got my start flying RC planes in the 1980’s, and also raced motorcycles, and also went through a phase of modifying my car. Ignoring specs has suited me VERY well. You can’t push the limits if you live w/in the specs.
Sorry for the OT, but you’re just trying to start arguments at this point.
As others have said, your point is valid, but so are many other options.
I guess I’ll add…
basically, the problem has been discovered. The solution is either weight, smaller props, or lower voltage as you suggested. The voltage spec on the motors is really meaningless. All that matters is the total power they’re using so they don’t burn up. Higher voltage and smaller props is the same thing as lower voltage and larger props, as far as the motor health is concerned. (This is over simplified but applies to what we’re doing)
Otoh, all the copters I’m playing w/ lately hover at about .10 and I don’t have any problems w/ them. But they’re small and I guess the small props don’t act as much like wings to keep the copter in the air.
While we’re on this topic… You’re correct about this when you have the opportunity to plan and buy exactly what you want. But in practice, if you already have the motors, I’ve found that using larger props and lower voltage is the most efficient option. The electrical losses are nothing compared to the physical inefficiencies of smaller props. So, oldgazers suggestion may indeed be the most efficient solution for the existing motors… Although when you factor in costs, batteries are expensive and then it might not be the best option.
As i can see that topic demonstrates a lot of reactions, thanks for the quality of your answers.
I believe that the goal of such community (at least mine) is double, first is learning second is to initiate new possibilities. otherwise better buy a DJI (probably even cheaper).
On that project my aim is to build an "automated flying tractor", so my need is to get the maximum load capacity whilst keeping reasonable fly ability with extremely light weight (and this on the same flight), this is my challenge actually.
The choice to use the motor on the very max of the spec is not an accident,
Obviously, this is approaching the limits, this comforts my choices as my challenge here is to make a drone that fly’s in both configurations (light and strong).
I’ve honestly learned a lot with your answers guy’s I realized I was not looking in the right direction I understand better what was happening when the drone was climbing and why it is more stable after a minute of stabilization so I’m very grateful.
I’ve been started with Ardupilot recently, this is very interesting, next experiments will be a lot of fun I’m sure.
I think we can get a bit argumentative at times, but it’s all to help and in good fun. I have no doubt we’d all be friendlier and less of the “My answer is the correct answer” in person :).
Anyway, I doubt it will take much of a change to get it performing. Just strap on a 2nd battery (or even two more) in parallel to add some weight, or buy some inexpensive slightly smaller props and see if that fixes the issue.
Like you said, you’re pushing the limits w/ your choices and so you’re likely to have a few issues to overcome.
You’re talking to a guy who ran a motor re-wind shop on a US Navy Tender. I’ve worked on every thing from sub HP high RPM/low torque clock motors to 1.5 mega watt motor generator sets. You can only go so far past the specs and the blue smoke happens.
As a racer, I’ve seen more than one turbo motor grenaded because the idiot who built it didn’t heed the maximum boost spec. Same thing for a grenading a 5 speed Porsche gear box when a moron hits 4 grand and dumps the cluch trying to get out of the paddock. I can’t tell you how many HD Sportster riders I’ve heard crying in their beer because they dropped a ton of cash on a S&S Shortly G carb, some Vance & Hines straight pipes, and now the bike runs like hammered dog do… 'Course I would expect that from a bike that is sorta kinda a drag bike and not a street bike any more… Funny how messing with the torque and RPM curves can bite ya…
The real bottom line is the power system (motors, props, AND battery) on this particular aircraft is just plain wrong, and the easiest and most cost effective way to get this aricraft to fly half way decent is to use a 3S battery. Or, you can go the hard way and try to tune it (Have fun with that), or you can the expensive way and replace the motors with something sub-800Kv, and then pray you have enough room to run 13" props.
So, which is better, swapping in a $12.00 battery, wasting more time tuning, or swapping in 4 $20.00 motors and 4 13" props?
Corrado,
I’ve got your point which i fully agree, again in fact, for instance, I’m looking for force, the configuration 10 x 4.7 / 980kv 4S provides the highest Throttle on the spec this has nearly been reach actually for sure my Lipo 4S 2600mAH could not reach 80Amp at full power but only 52Amp (+/-3 kg of Throttle) so I’m satisfy with this.
This said I’m in a situation where my drone is totally over powered at no load, so the stability in that situation is a challenge, (that’s what’s been revealed by the topic) as a result if the parameters are not perfectly tune, I’m having strange behavior, this is precisely the subject of the topic. Thanks to rmackay for his clever analysis, this has finally driven to the question of the prop’s, which is interesting to understand what impac can a propeller size can have, and simply being on spec limits, very fruitfull communication for me, i hope readers will find some answers in that topic as well.
May be next topic should be “How to manage good stability with overpowered drone ?”
Please consider that the configuration you are running now is really not suitable for a stable flight and even if you tune it to have it nearly acceptable if you fly with wind you’ll be in big troubles.
My advice is to fly it on 8" props and see where the Thov ends up and make your considerations from there.
To have a good flying aircraft that does well in all weather conditions i’d look at a Thov of 0.4-0.5 or around there.
Glad the discussion made you think and made you understand things at a deeper level.
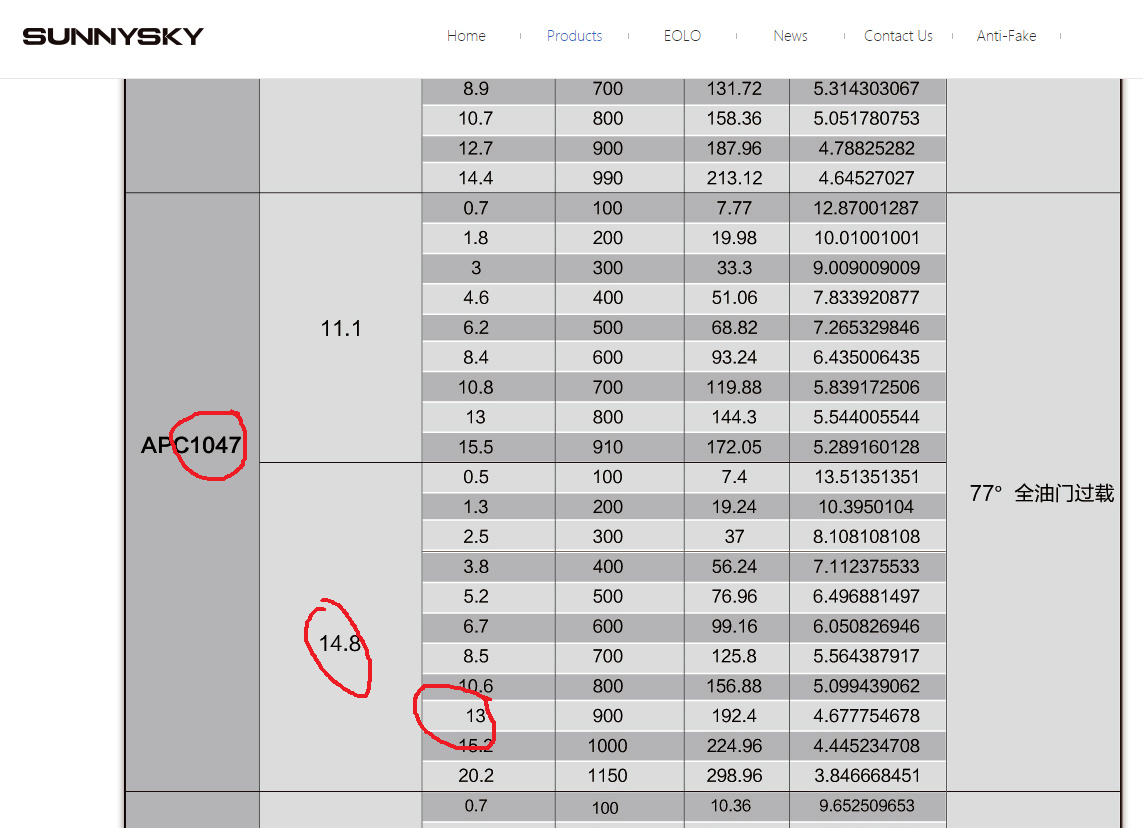
rmackay9 is true. I have experience with SUNNYSKY X2212 980KV and 1045 props. Your props 1047, which produces more thrust. Your aircraft configuration + 4S battery + 1047 props + high rate gains is one part of your problem. Your aircraft seems “over excited”, “aggressive”. To lower its “temper” you may lower the gains, prop sizes and battery voltage. So most of the answers are true. As for my experience, 3S with default gains are good for X2212. But, if you want to keep your hardware configuration (1047 + 4S) unchanged, than you should do what rmackay9 said and even lower the gains under the default values. The other part of your problem, I think, you should make ESC CALIBRATION again.
Nice Flights…
Dear All,
Well, i fine tunned the ESC and autotune, wich have significantly improved the stability, i’ve not experienced the climbing issue again but not too many testing to make a final conclusion on that particular topic, i know that in windy situation this might be an issue.
My copter is still over powered (which is the goal on my application) it weights 1.2 kg and still can pull 2.6 kg in flight, so i’m here at the really top of the spec of the motor/props (4 kg in theory) my drone is design to be an aerial tractor, so i will fly both under weighted (with 15% throttle) and at nearly full power on the same flight that’s my challenge, probably be a dedicated flight mode would improve.