We have made a quadcopter for Surveillance purpose the specs are below ,
prop siz -17 inch
motor - anti gravity 5008 -400kv T motors
air 40amp esc
pixhawk cube orange
here 3 gps
battery- 22000mah 6s lipo
take off weight -4kgs
We are facing few issues mentioning them below also attaching flight log.
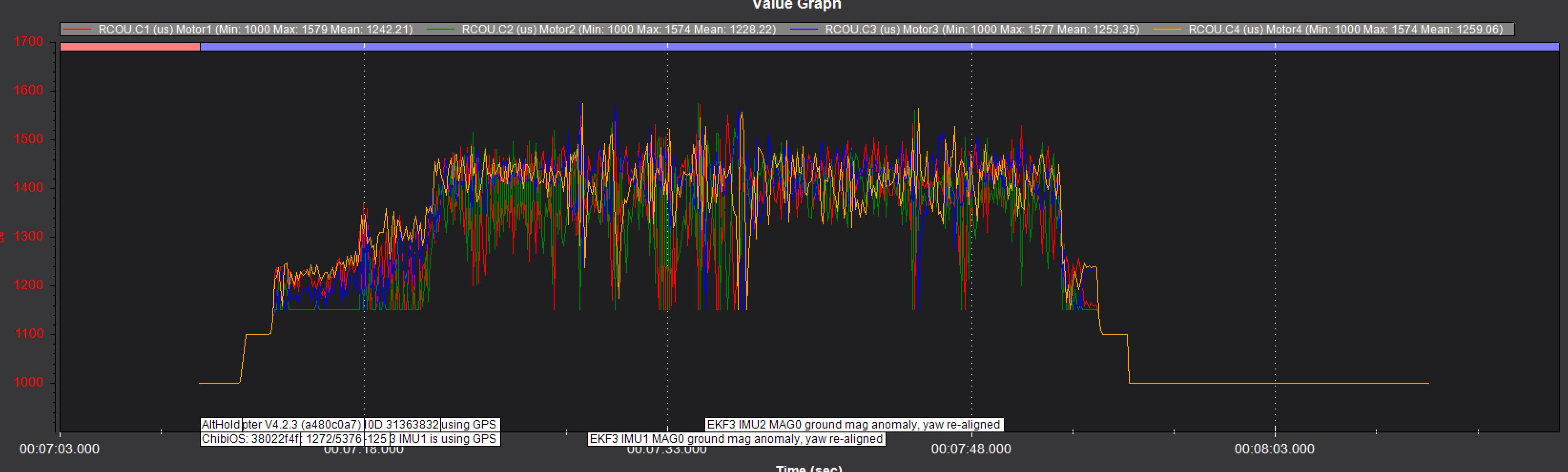
1- Oscillation in motor power/sound(jerky) In Alt hold and Stabilize mode. loss and gain of altitude minor
2- Loss of Altitude during left or right bank maneuver .
3- After doing manual Tuning we are still unable to auto tune. Error- Tune manually Level fail
4- Unable to maintain altitude when the stick is in neutral position.
Requesting some inputs and information for the same.
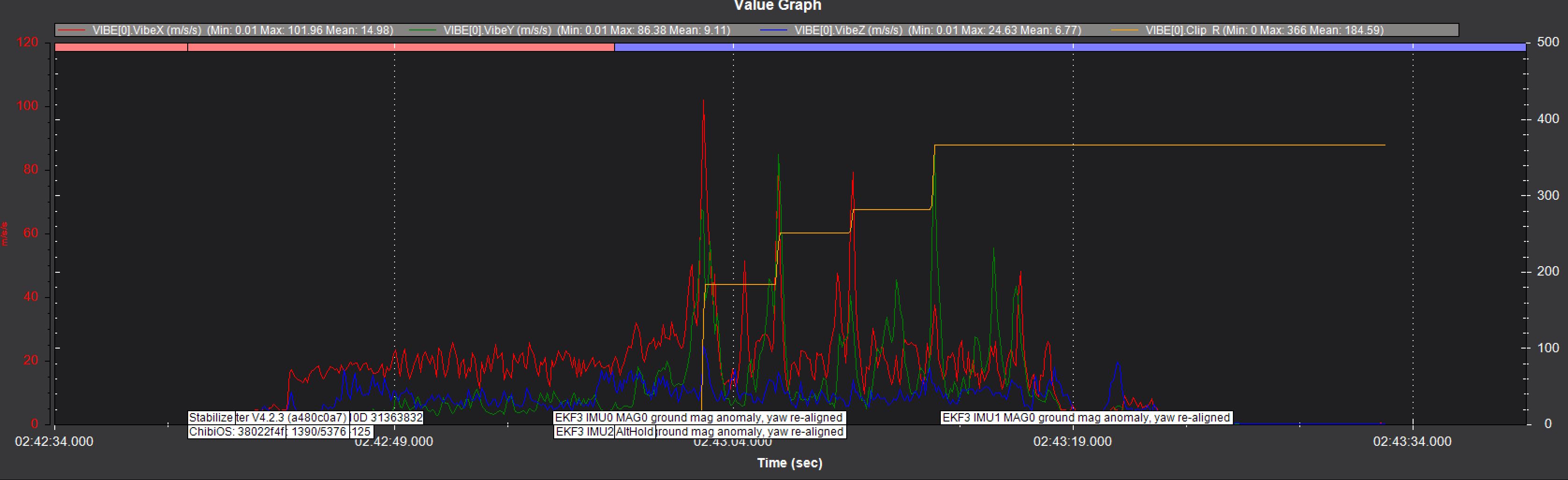
It depends on the frame, what the FC is mounted to and how. Is there landing gear or payload flopping around? Because it’s X and Y vibes that are high.
The Motor outputs are oscillating badly and bouncing off of minimum. You probably want to lower MOT_SPIN_MIN. Just make sure MOT_SPIN_ARM is lower than that.