Hey,
i set up my quad today. first flight was ok, maybe a bit sloppy. than i did a auto tune with 10hz filters (big props).
next flight was fine, but when i tryed to decende for landig it got out of control and crashed.
Apart a wrong calibration of your current sensor , you should use at least 6A to hover while your log shows about 2A .
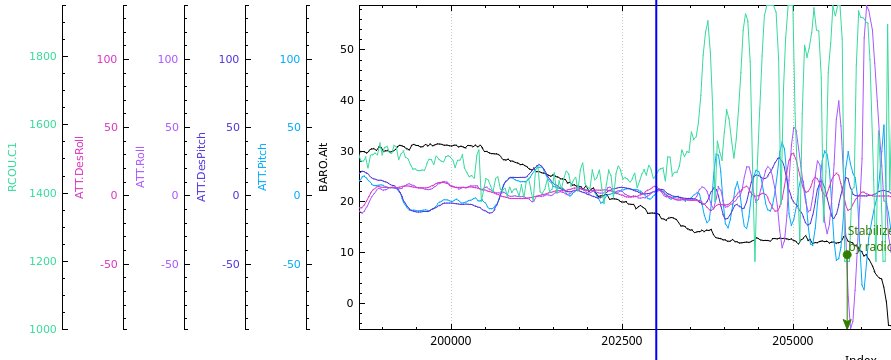
It was not just descending, a more rapid descent was ok while you were in Stabilize mode while in Loiter you crashed.
Problem start at 203000 when while descending you gave some Pitch, Roll and Yaw command at the same time, motors start to had very rapid changes in speed while the copter loose more and more his attitude .
Esc settings , props inertia , I do not know, it is just a suggestion, you have quite low Kv motors for 4S battery.
yes current sensor was not calibrated, take it by 3x.
i was trying to descend in loiter mode, i cant remember but i think i was just dropping the trottle, than the quad started shaking wildly and descendet very fast. so i put the trottle up and tryed to switch to stabilize (maybe something was wrong with gps/compas) but that was to late, only 1/2 second before impact.
hmm yea could be a bad batt/motor/prop combo.
escs should be fine, this were 30A blheli escs, and the motor / esc combo was tested to make sure they do not have any problem with the low kv motors.
My guess would be you decended rapidly through your own prop-wash and the tuning isn’t responsive enough (or maybe over responsive?) to maintain stabilization through it. Just in practice, I generally do not descend straight down, especially close to the ground. I normally try to fly into a landing because of the excessive prop wash that can destabalize, especially when in ground effect.
That’s an unfortunate choice of a drivetrain, tbh. Even with extensive tuning it won’t yeld good results.
Those motors are too small for the 15-inchers. They don’t have the torque needed to accelerate that big a prop.
4S - 390kV - 15 inch is a nice combo but you’ll need a bigger diameter pancake. There’s unfortunately two naming conventions for brushless outrunners and trey’re a bit misleading. 4225 means 42 mm dia x 25 mm tall. But some manufacturers describe the outer shell dimensions while other describe the internal stator. Unfortunately, in your case, it’s the former, so your stator size is in the realm of 3510. Which is a tiny, puny machine for that big a prop. Of course, it “can” run it, and the weight/lift ratio screams efficiency, but it’s at the cost of everything else… handling, maneuvrability, smoothness.
guys you are all 100% right i guess hover time with this one was around 40 minutes.
only the frame was broken in the crash, so everything else is fine.
do you have any tips for a suitable motor/prop combination for 4s 6600 mah and maybe also a frame (i could also just build one from scratch)?
I used to use the RCTimer 5010 with 15 inch on 4S. But the quality of the bearings was horrible. Any bigger motor will do. T-Motor MN4012 for instance or Multistar 4108 (this is one Multistar where the naming convention uses stator size - outer shell is 4726)
A real simple fix would be to go to a 6s pack. But you’ll have to go down in prop size. I think 6s would be 12 or 13" props. You efficiency will drop, but your stability will be much better. It seem obvious to prop up and drop the voltage to gain flight time, but you need a motor that can supply enough torque then. Theses are not the motors : )
 hover time with this one was around 40 minutes.
hover time with this one was around 40 minutes.