Hello friends,
today I made a flight with my quad 450 and dual GPS.
Setup: Arducopter 3.6.11, Pixhawk 4, 9055 gemfan propellers, 2,8 kg weight.
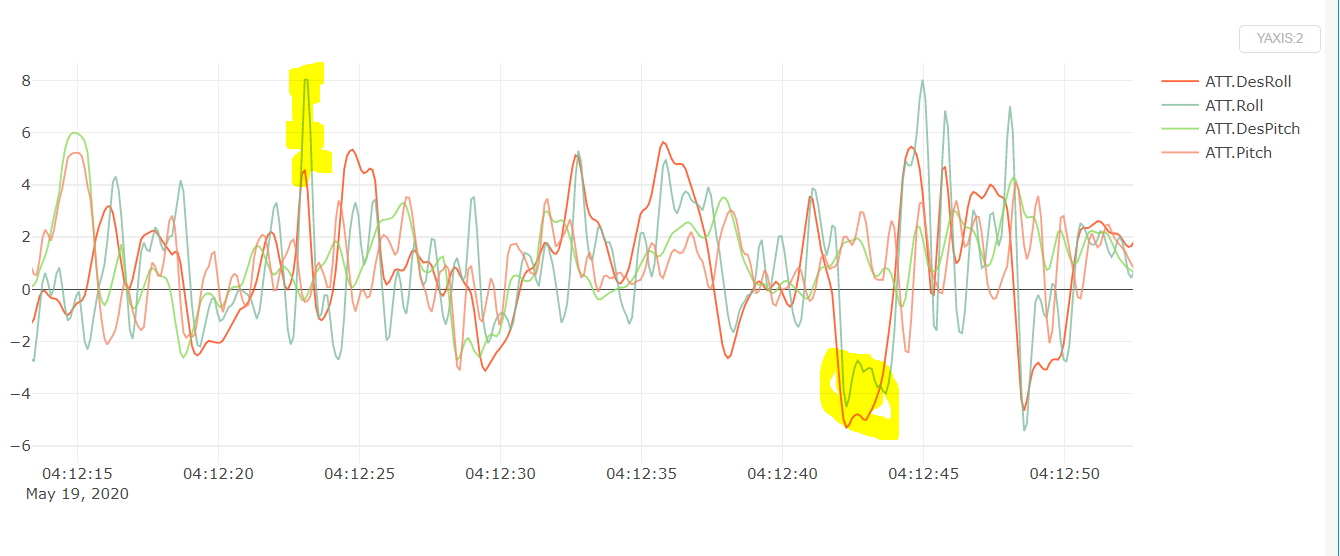
Overall, I can be satisfied. I only see some uncertainty in maintaining the Loiter position.
I have not proceeded with Autotune yet.
I attach my log to get your opinion.
In your opinion, with these performances is it necessary to proceed with autotune? LOG
Size (kb) 11551.138671875
No of lines 133943
Duration 0:06:30
Vehicletype ArduCopter
Firmware Version V3.6.11
Firmware Hash f0d59294
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = GOOD - mag_field interference within limits (5.05%)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = GOOD -
Test: GPS = GOOD -
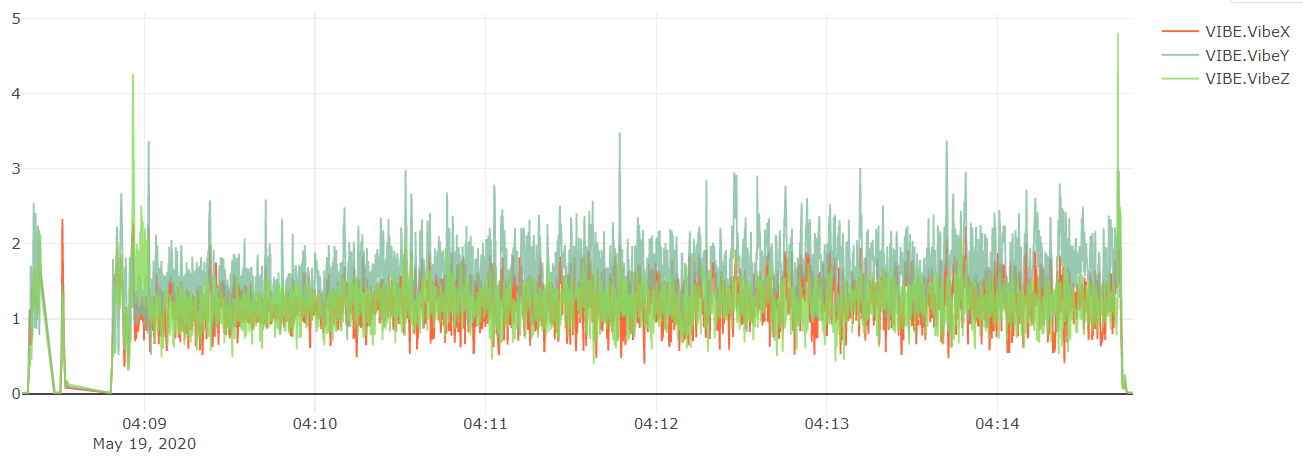
Test: IMU Mismatch = GOOD - (Mismatch: 0.24, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = GOOD - Motor channel averages = [1519, 1529, 1487, 1516]
Average motor output = 1512
Difference between min and max motor averages = 42
Test: NaNs = FAIL - Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘THR_MIN’ not found
Test: PM = GOOD -
Test: Pitch/Roll = GOOD -
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data
Thank you for your answer @smartdave .
I thought I would proceed step by step and update to AC 4.3 after getting a good set of PID values.
I thought of proceeding manually and not with autotune as I have read about some cases in which a crash can occur.
All your advice is welcome and thank you.
Dual GPS is set as “Use the best”. Although the GPS are not the same both use an ublox M8N chip and I have observed that their accuracies are comparable (obviously the default Holybro GPS is better). Do you think that if for some reason the second GPS is better and the control unit considers it instead of the first GPS there could be problems in flight?
Thanks
P.S. ATC_ACCEL they were already set as tuning guide
Hi @smartdave,
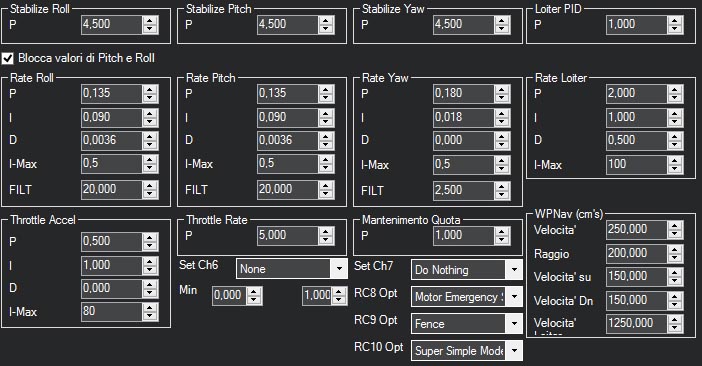
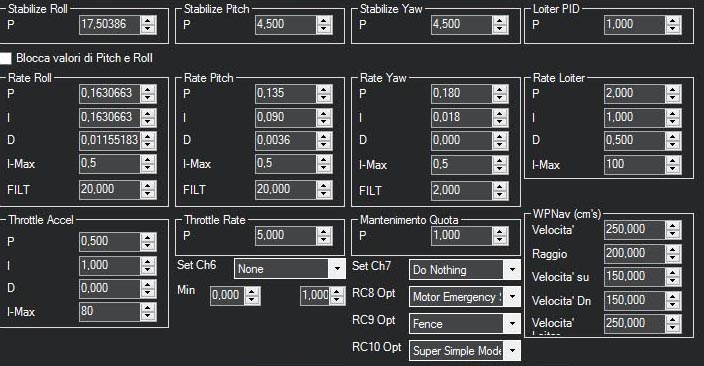
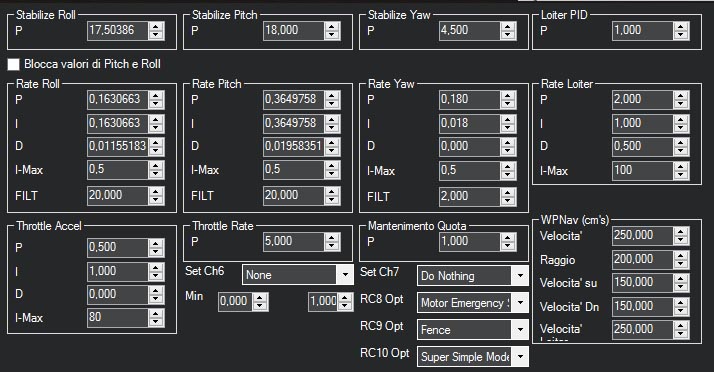
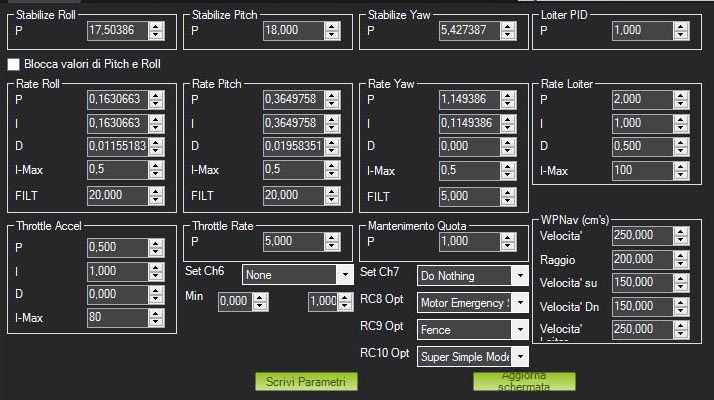
i attach autotune changement valor of PID roll axis.
Very different from default valor.
Reponse of roll axis is very better after autotune.
But difference is very big i think.
Dont forget to do the yaw autotune.
If the PIDs are already fairly good (from other Autotunes or manual tuning) then subsequent Autotunes seem to be much quicker - you’ll be able to run all axis at once.
Certainly as soon as possible I will also carry out the PID of the YAW.
I decided to go one axis at a time for more security.
Thanks for your advice @xfacta
Your help and support has been crucial in this process.
I would like to ask you one more question. My gear is retractable and I wonder if, having autotune with the gear lowered, the moment I retract it for the flight it will significantly change my attitude. Did you happen to face this question?
Thanks to all friends @xfacta@smartdave