ChrisOlson shared this advice
I’m still unable to achieve more than Arm and Takeoff while in QGC. After takeoff, I can switch to Auto Mode but the vehicle Loiters only. I have not been able to Load the mission from QGC.
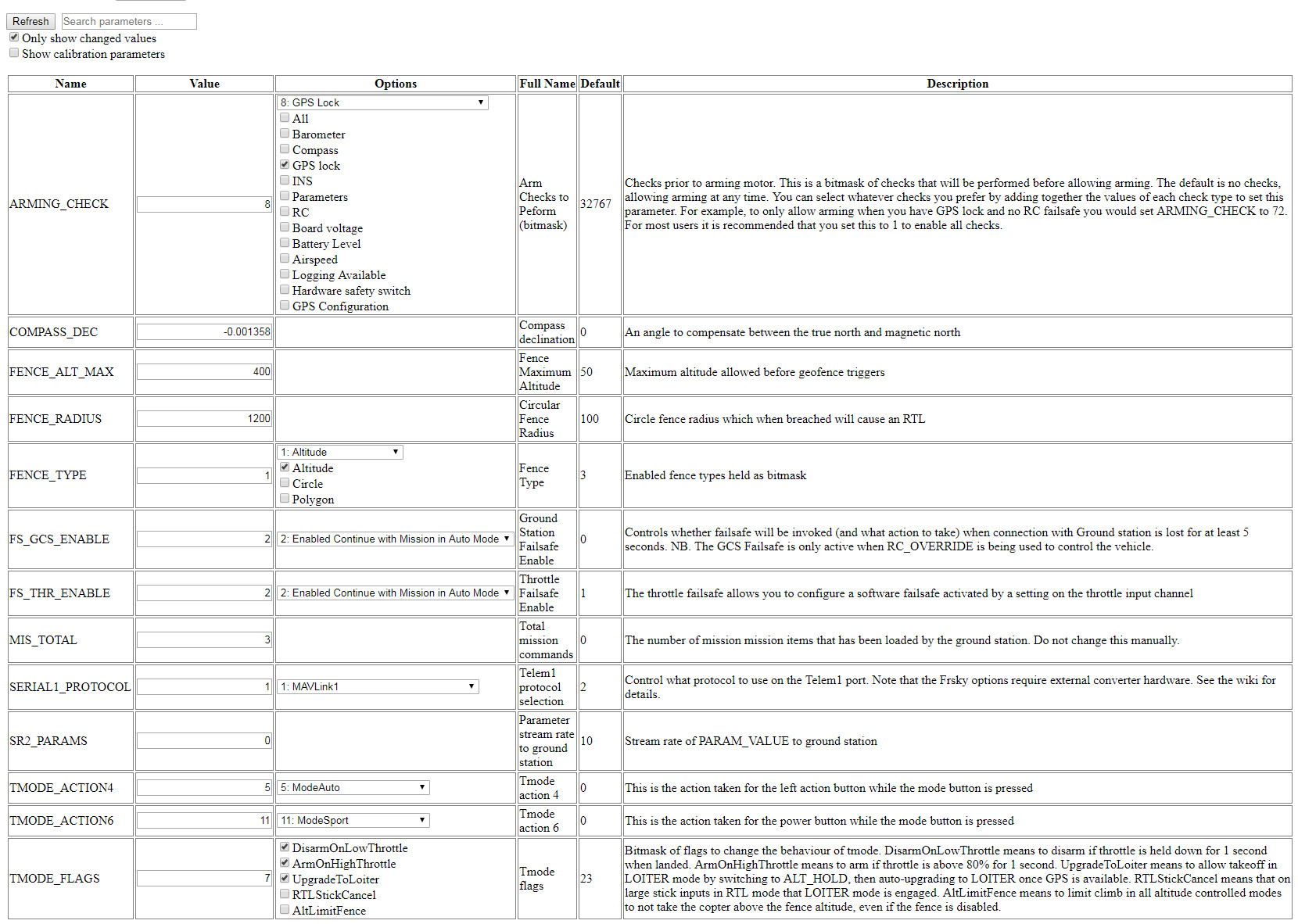
The parameters changed in my 2450 are attached.
Any insights will be appreciated!