The main way to test this is to do step pwm inputs from near minimum to maximum. Basically you need to abuse the low end of the RPM range with fast steps to high RPM.
This seems quiet high. Make sure you have calibrated the ESC’s.
They don’t impact the minimum and maximum throttle settings. At minimum throttle you should have an assertive rotation but not so much that it is producing a significant amount of thrust.
I was talking about the ESC phase timing. This is not a setting in Ardupilot, it is an ESC setting. There are a few settings in BLHeli that might help. RC Test Bench is a good reference for BL Heli settings.
This is probably not going to be any great improvement in your system. So at this point I would not add another variable.
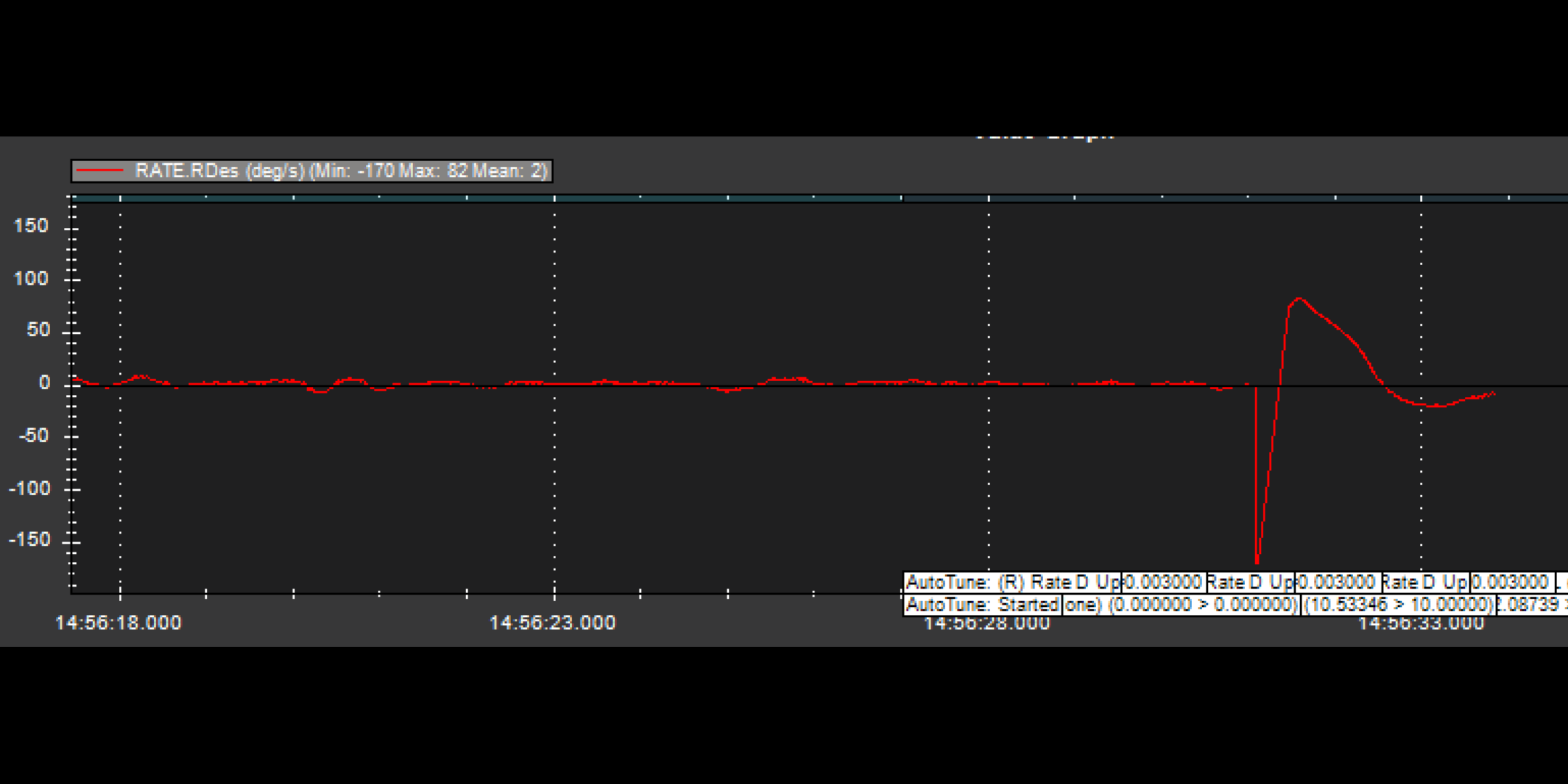
No, it sets the target overshoot for the tests. This overshoot needs to be between 5% and 10% for best performance. However, the tests can’t tell the difference between noise and the actual movement so we set it to the upper range by default. The noise in the system will mean it ends up lower.
Autotune works between 10 and 20 degrees on the angle steps and aborts if it goes over 20 degrees. So this would have no impact on autotune.
 Unfortunately our rig flips when we exceed 15 degrees so when autotuning the roll axis we flip immediately. Will update here and
Unfortunately our rig flips when we exceed 15 degrees so when autotuning the roll axis we flip immediately. Will update here and