I finally got my quad working nicely in the configuration I wanted, so I sent it out auto flight.
A minute after launch (after it had passed the first waypoint) it dropped out of the sky like a rock and smashed into several pieces.
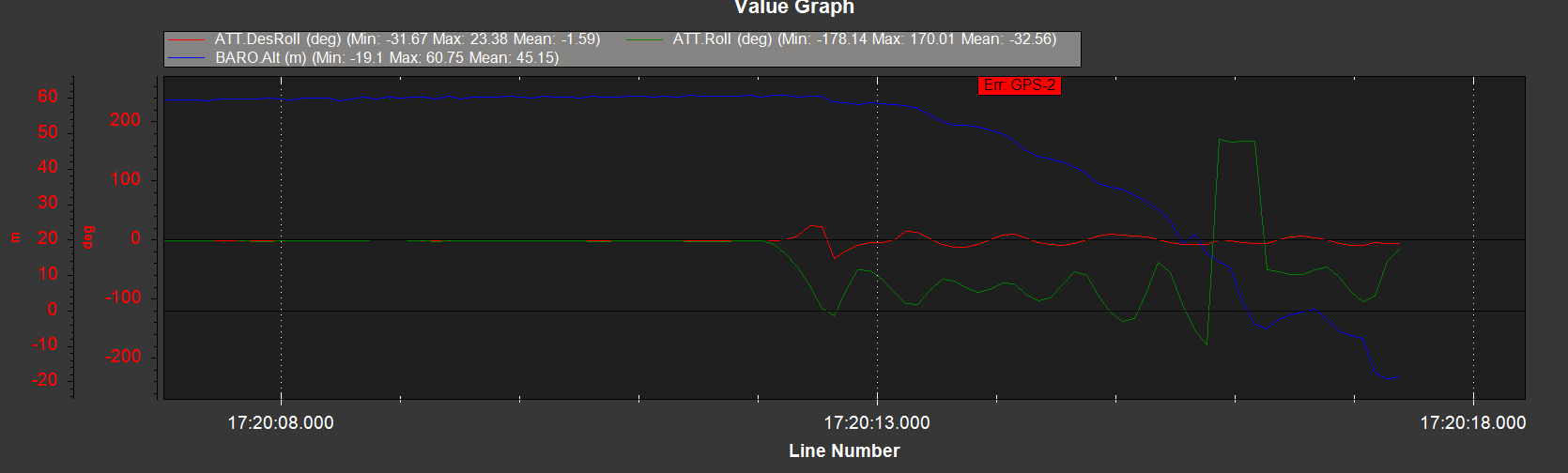
I followed the instructions here in an attempt to diagnose the problem. The fact that Roll did not match DesRoll, and Pitch did not match DesPitch indicated to me that there was a mechanical problem.
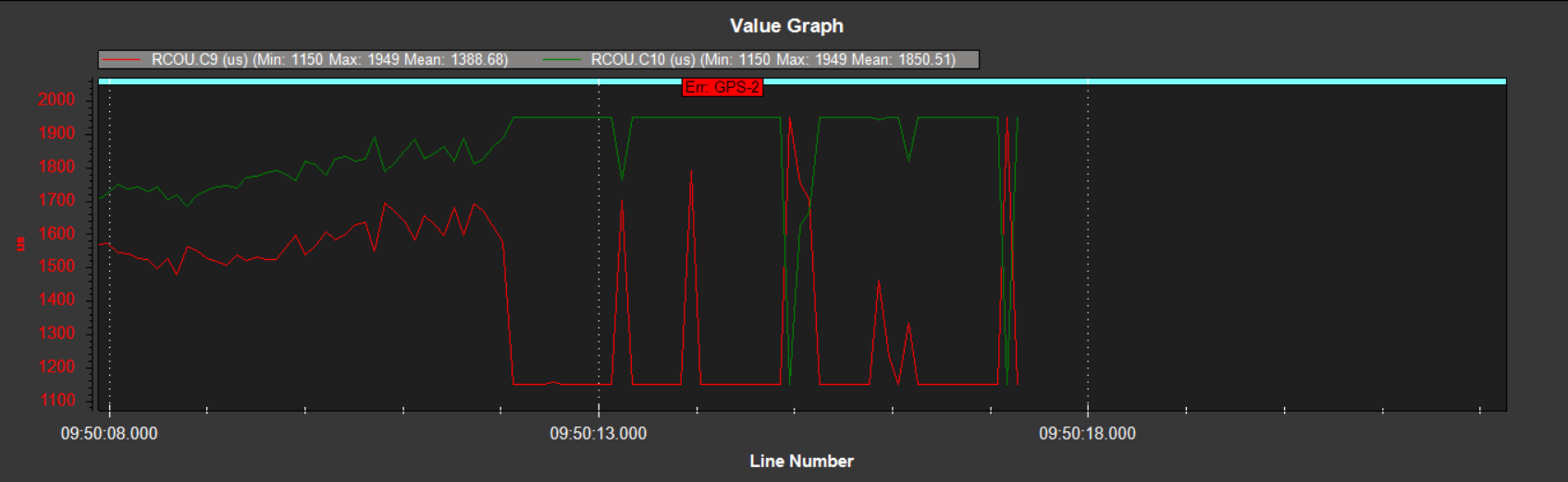
When an esc/motors fails you can see a line in rcout values thats faild motor is maxed and opposite motor goes to minimum because flight controller try to keep balance
Its hard to say that is was a motor problem pattern
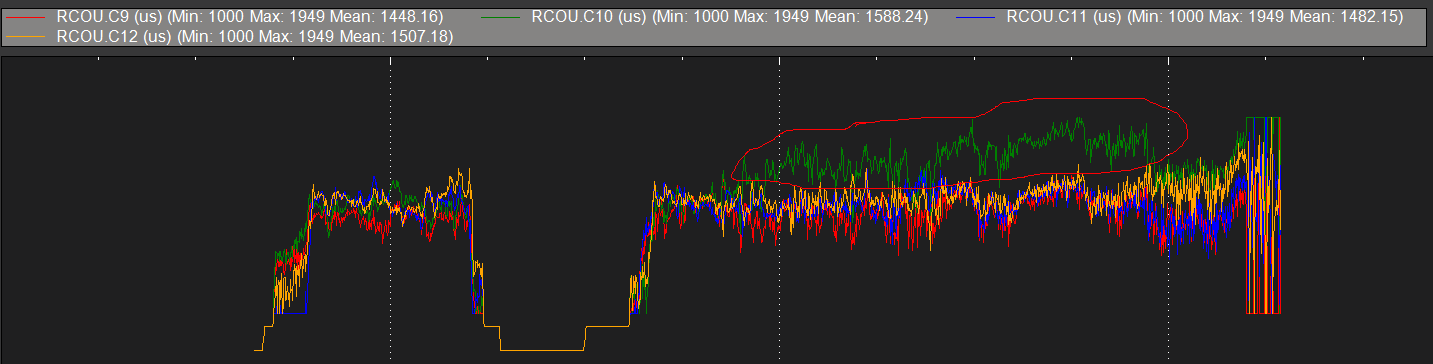
It was cloud becase of flying against wind, wrong motor kv or physically imbalance
I was flying in stabilize mode and after 6 min flight at around 0.5m altitude. suddenly the drone moving toward backward direction very rapidly and smashed into my bag. By god grace all was fine only the props were damaged. But i am unable to understand what has happened. I am attaching my log, Please have a look @hosein_gh
Hi @AmitSingh
Please create a topic and describe your problem there and i will look into that
This post is for @hoppy1977 and i dont want to hijack this topic
Thanks