I was flying in stabilize mode and after 6 min flight at around 0.5m altitude. suddenly the drone moving toward backward direction very rapidly and smashed into my bag. By god grace all was fine only the props were damaged. But i am unable to understand what has happened as i have given the forward pitch to counter the backward but it did not respond . I am attaching my log.
hi @AmitSingh
i checked many times and i cant find why your copter crashed at the end
in fact everything was looks good !
set LOG_BITMASK = 196607 and do a test flight in stabilize and althold then send log file for a better analysis to find out possible problem in your build
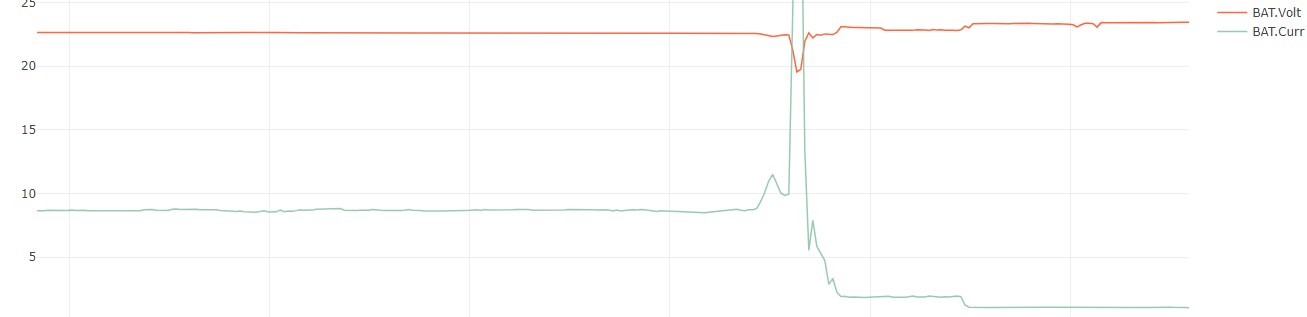
There’s a voltage sag and current spike as if there’s an electrical failure, ESC or motor. It’s possible even a prop was slipping, or the whole thing is just not stable enough yet.
It’s very hard to tell though since you’re hovering so low there’s not enough altitude and movement to tell what’s really going on.
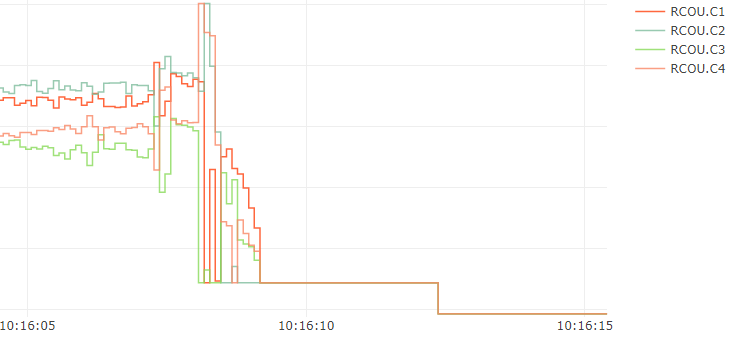
It looks like Motor 4 ends being commanded to maximum (indicating it has no effect) and motor 3 goes to minimum to try and compensate for the loss of thrust on 4.
Try to get about 2 meters altitude next time. That gets you up out of any ground effect, and may even give the craft time to recover from wobbles, or at least let us see what happened in logs.
After you fix the failures, with the quad connected to MissionPlanner, press Alt A on the keyboard. Answer the questions and accept all values it offers and write them to the flight controller, including the INS_GYRO_FILTER value (don’t leave it at 20 as suggested).
The also set these:
BATT_FS_LOW_ACT,2
BATT_FS_CRT_ACT,1
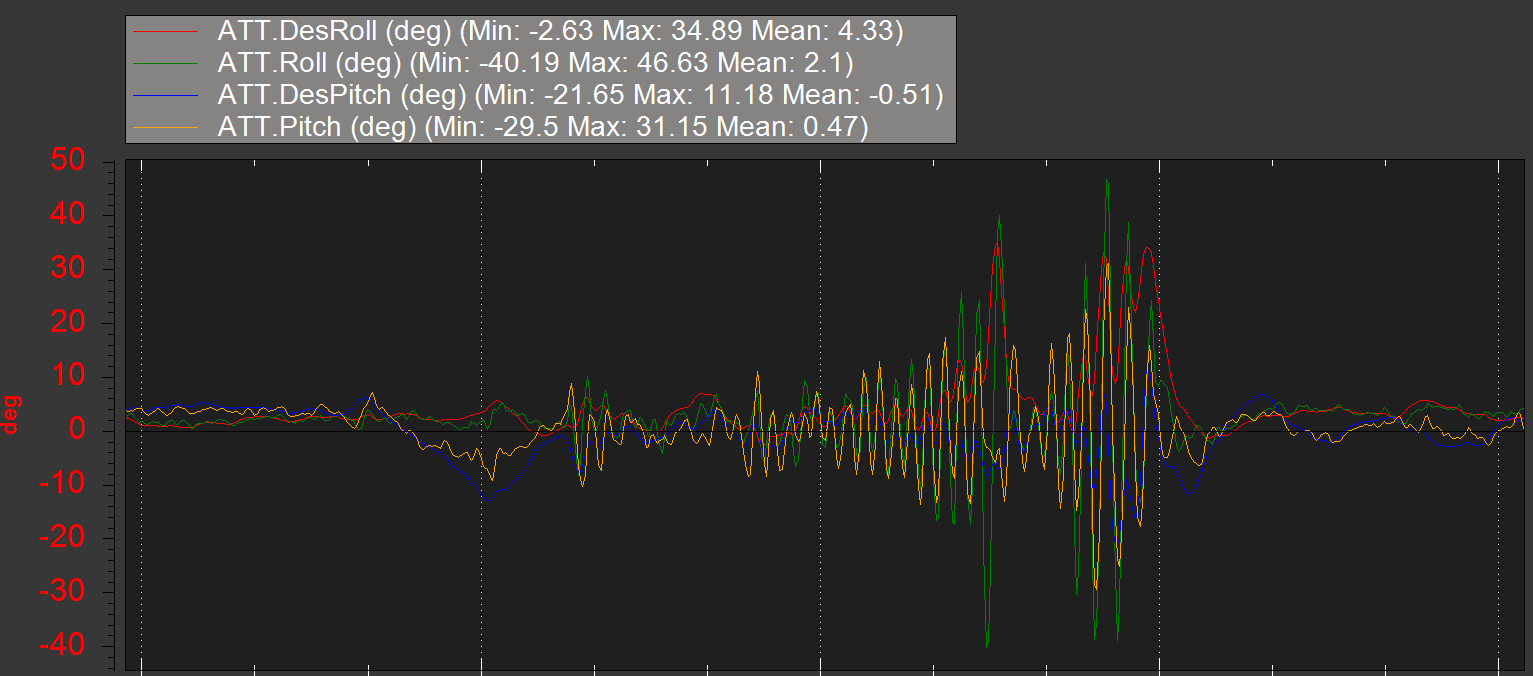
Vibrations are becoming an issue even during constant altitude, but especially during that wobbly descent. You will have to check out prop balance and all the usual suspects for vibration.
You still have a lot of default parameters that are quite important,
Connect to MissionPlanner then press ALT A on the keyboard and follow through that dialog entering your correct prop size and battery cell information. If the calculations offers a value for INS_GYRO_FILTER greater than 20 then use the new value and all others too.
Then do a short test flight, just hovering and gentle stick movements to check basic stability and see of you can move onto Autotune.
Better supply a link to the .bin log files instead of the .log files
@xfacta and @hosein_gh is that a possible , fc detect the pids not good or something need to make sense so in flight make tuning without the permission to make more reasonable flying experience
Also I was show somewhere to in-flight auto tune but only 1 axis using channel aux 6 (hmm potentiometer nob) i dont remember but it seems to know
Yeah , exactly
My thought is fc detect pid are not compatible for this copter then trigger one by one mode for autotune , just because more aggressive flight performance
Is it possible ? , Or script do this ? , Yeah it’s little bit scary point like in flight tuning but it’s my thought