Hi,
My work group and me experience some very curious effects using the Arduplane with Q-Plane. (V4.1.1 up to 4.2 dev)
We probably missed a configuration parameter, but after several days of testing we don’t know how to proceed.
If it helps i can try to process some log data, but i guess we just made a very basic mistake?
Directly after arming, everything works great. Takeoff in Qstabilize and Q-hover works well. Control via RC is working as it’s expected.
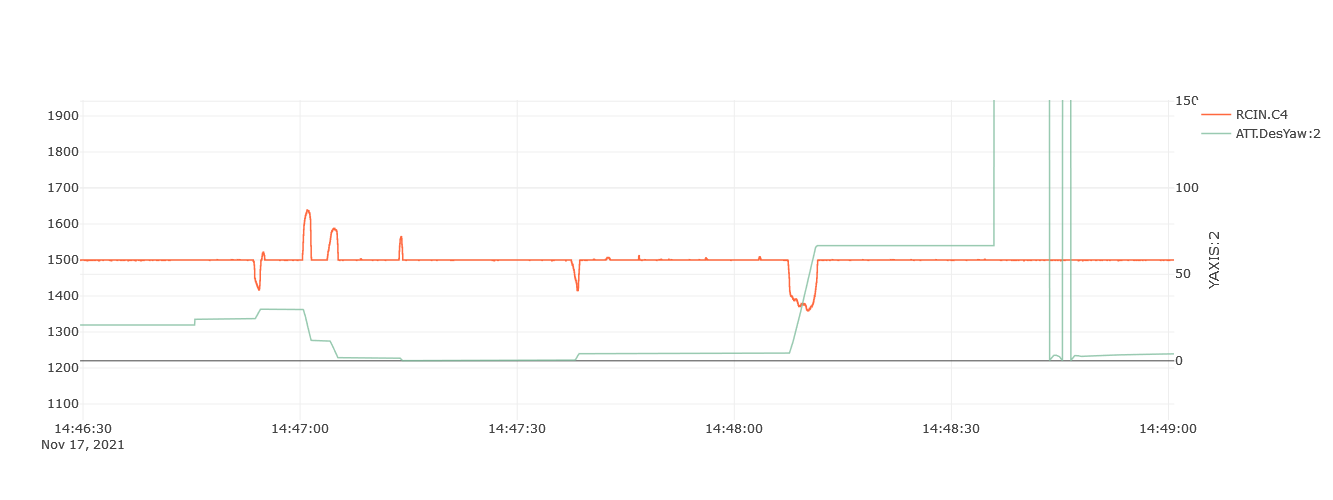
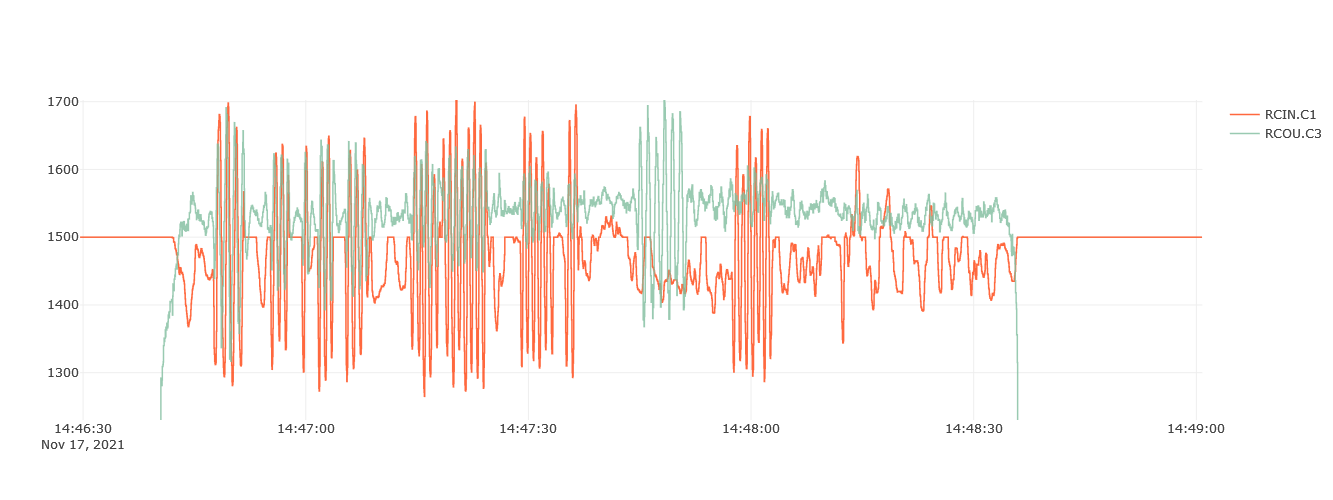
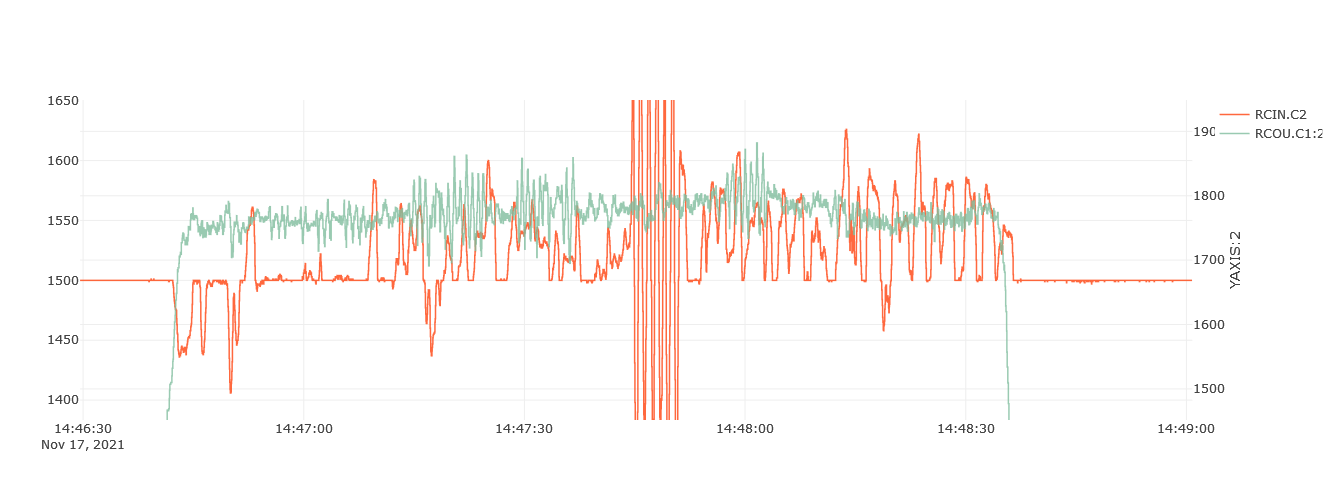
After some yaw inputs in flight, the problem begins:
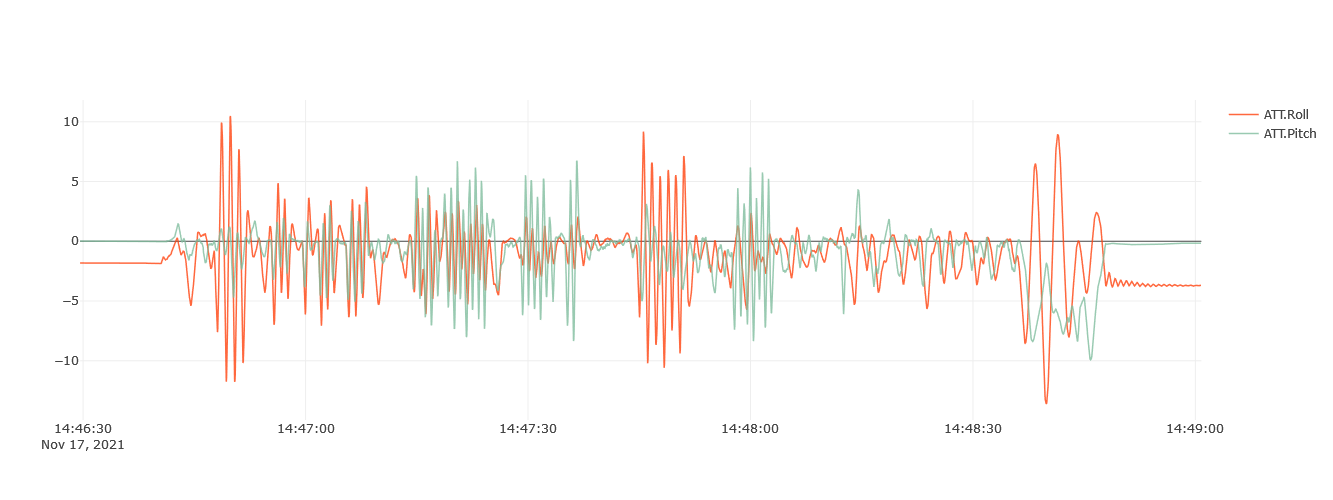
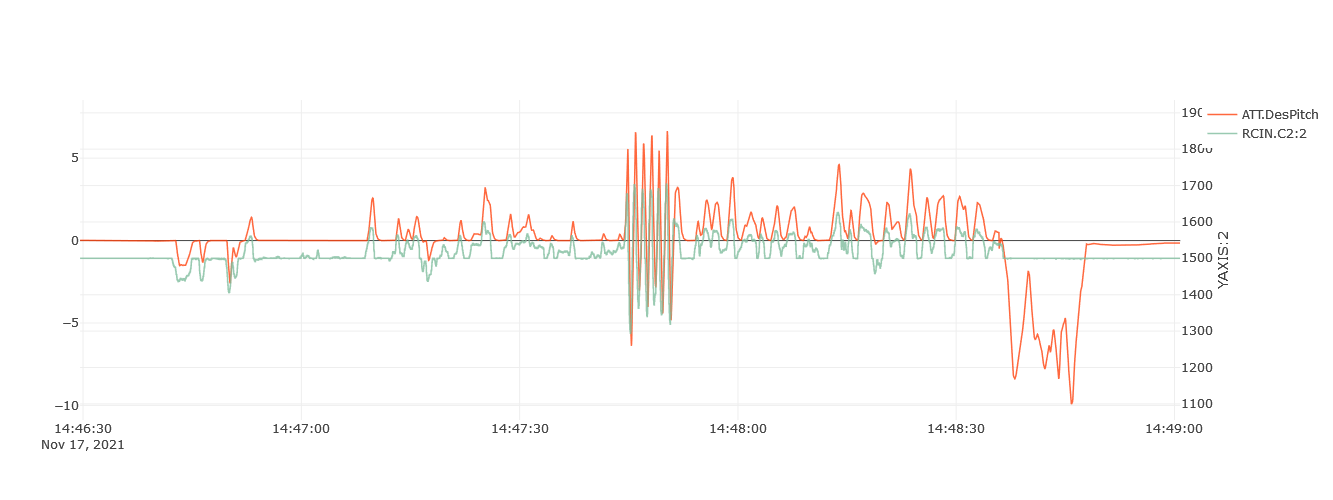
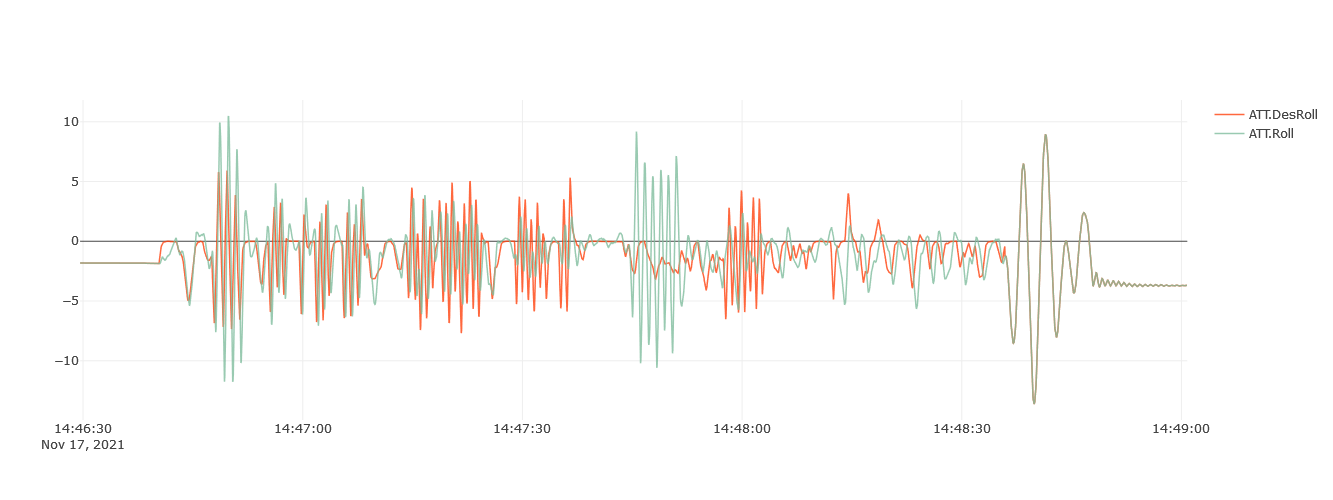
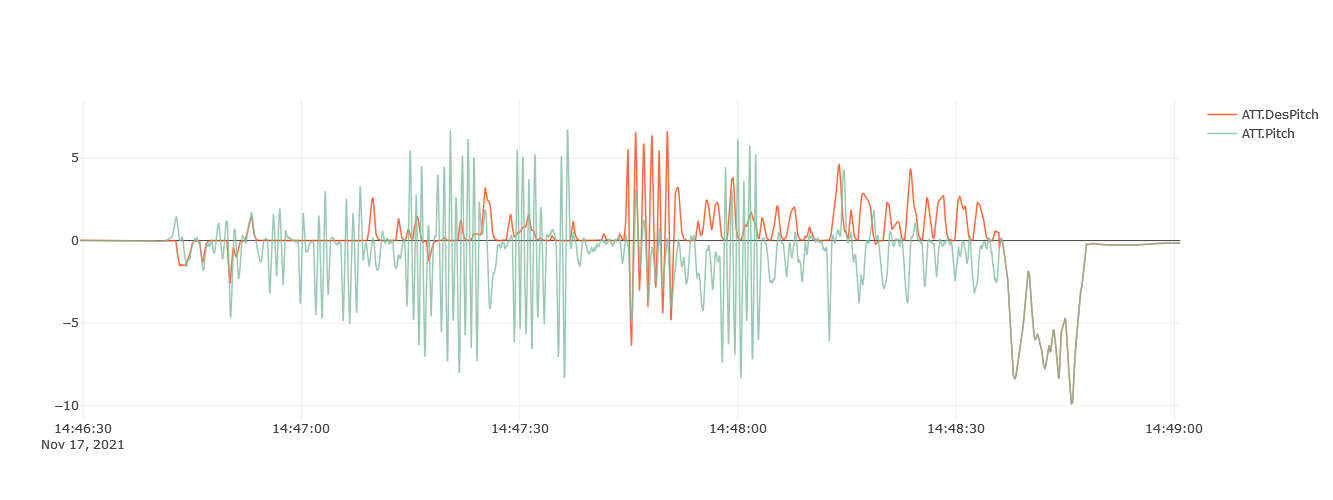
Giving e.g. roll inputs from the RC results in a roll response, but also some pitch response.
The more RC yaw input was given, the more this effect increases: a rotation by 90degrees is pretty common.
Basically i was able to control the aircraft (connected to a safety line) by imagining the wingtip as “forward”.
One time we even made it to over 180° rotation: Basically the nose of the aircraft was looking towards me, but i was steering it as it was looking away from me.
In the beginning we thought it is due to a C+±code modification we need for our aircraft, but ground tests using the stock stable Versions result in the same effect:
Aircraft mounted in the lab without propellers in a fixed position.(Maybe this causes problems as well?)
After arming, everything works right.
After RC inputs on yaw, the roll motors react to pitch inputs and vice versa.
After a disarm and rearming this effect is reset as well.
Even going to throttle min resets this effect, although this was not tested in flight!
We did try the following:
- Different Software versions. V4.1.1, V4.1.2, v4.1.3, v4.1.4 (tested on Pixhawk 4 only), 4.2-dev modified and self-compiled.
- In flight we tested it on one Pixhawk 1, in the lab we used two Pixhawk 1 and one brand new Pixhawk 4 hardware.
- For the ground tests in the lab we tested:
○ with and without GPS. (CAN-GPS on Pixhawk 1, and standard Holybro Kit-GPS on Pixhawk 4)
○ With our parameters, set according to the manual
○ With no changes to the standard parameters other than the basic requirements (frame, Servo-settings, Q_enable)
○ Copter firmware with stock settings + necessary settings (Quad, + Frame, no safetyswitch, reduced arming warnings to arm) + Accelerometer and compass calibration → same result. As soon as some yaw input is made, the RC input is mixed to the roll and pitch motors instead of only going to the correct motors.
○ Checked that simple mode and super simple mode are deactivated
It feels a little bit like the simple mode in the Copter firmware must work, but it was never activated and i think is not even available on arduplane.
If you could show us the missed parameter or point us in a good direction what we can test, it would be greatly appreciated!
Thank you
Christian Rieger