Hello.
I am curious: What effects DES_YAW?
I flew today, and my drone started to spin arround YAW axis, despite the fact, that i havent touched RC IN CH4.
In the logs, i have noticed that DES_YAW is changing. Can someone please explain me what can be the cause of this behaviour?
Thank you.
https://drive.google.com/file/d/15g4TN9c20Q6MzKtQw8ccAbEQnzRzzzuD/view?usp=sharing
Desired Yaw is what the Flight Controller “thinks” is the right Yaw position based on feedback input from sensors (compass primarily here) and command input.
Thank you
And do you see in my logs the reason why my drone started to spin a lot? i havent changed any settings and flew with this configuration for weeks
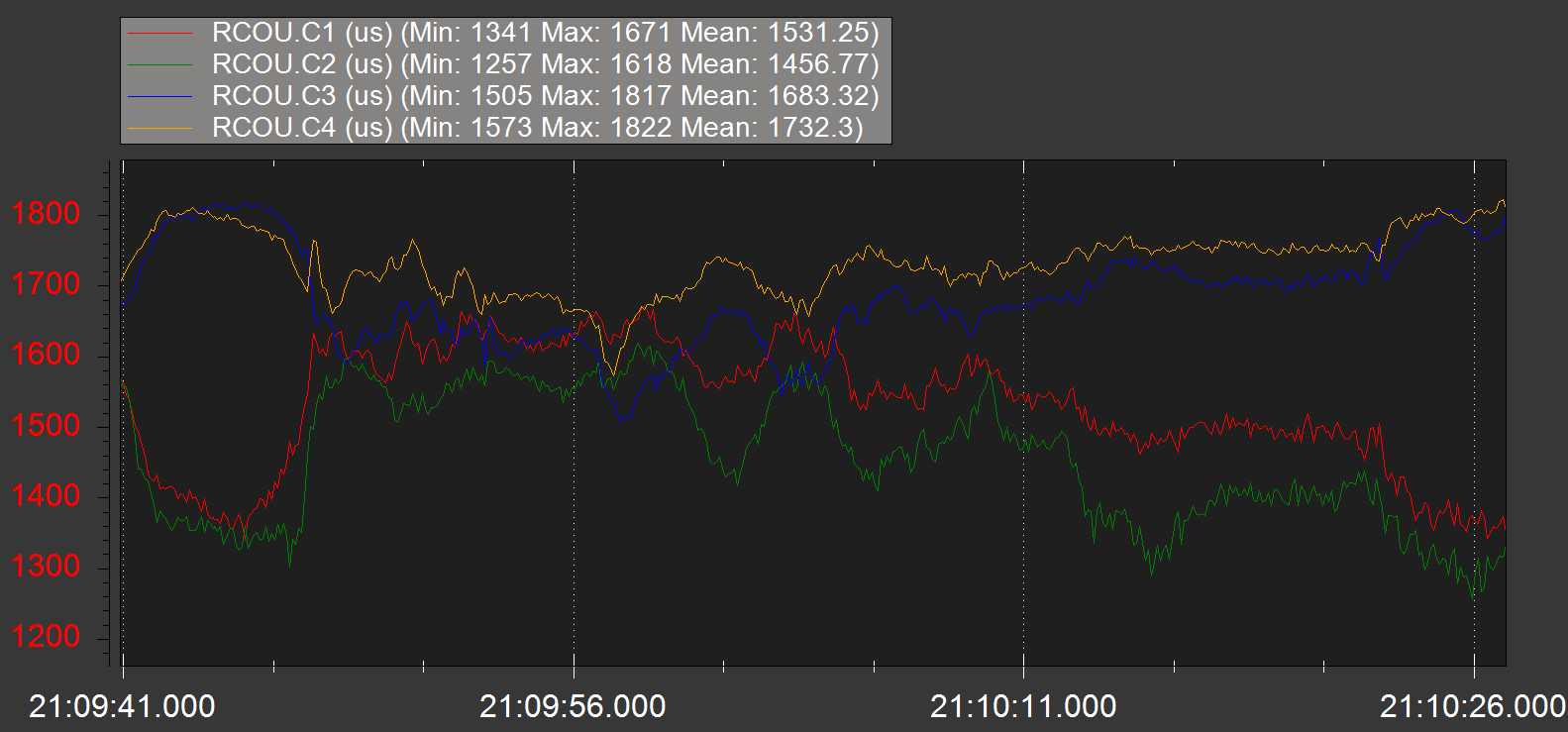
It’s looking a bit like a motor mount slipped/twisted (one of the CW motors, 1 or 2) and there’s a physical yaw bias that the flight controller cant fight without losing pitch/roll attitude.
Have you got a log where it was working fine?
You are actually right! it could be, that motor slipped. Because it is on round tube, and since there are large slowly spinning propellers, there is not much yaw torque from them.
But:
- Wouldnt the 2 motors have PWM maxed out to 1900? or when i have low pid for yawing, then it wont be that maxed out?
- I was thinking if it wasnt problem that i never did run a compass motor calibration on this one, but as i said, it did not happened before.
I am going to check it mechanically for motor slipped/twisted
Here is the log when it worked fine.
https://drive.google.com/file/d/1M2Ro95P4WgeEnls-QGzQmlg6JoQYJ196/view?usp=sharing
There’s a PWM overhead allowed for yaw control too keep some spare for other attitude control.
You should be able to turn the motors so the prop tips “point” at the neighboring prop and see which ones are misaligned
Thank you.
They are indeed a little twisted. Ill repair it.
I was thinking that maybe to increase yaw control on drone with such a big slow spinning props, i could probably deliberately twist all motors around “arm axis” exactly maybe 2-3° to “corresponding” direction.