Hi.
I want to receive data(such as altitude) with Jetson ORIN NX from CUAV-X7+. I connect them with TTL to USB converter(CP2102 USB to UART Bridge Controller) and when I use pymavlink, sometimes code stuck on " the_connection.wait_heartbeat() " loop and can’t detect HeartBeat. But when I kill with Ctrl+C, and run the code again, it works fine!
I don’t want this happen when my drone in air and I want stable and safe connection.
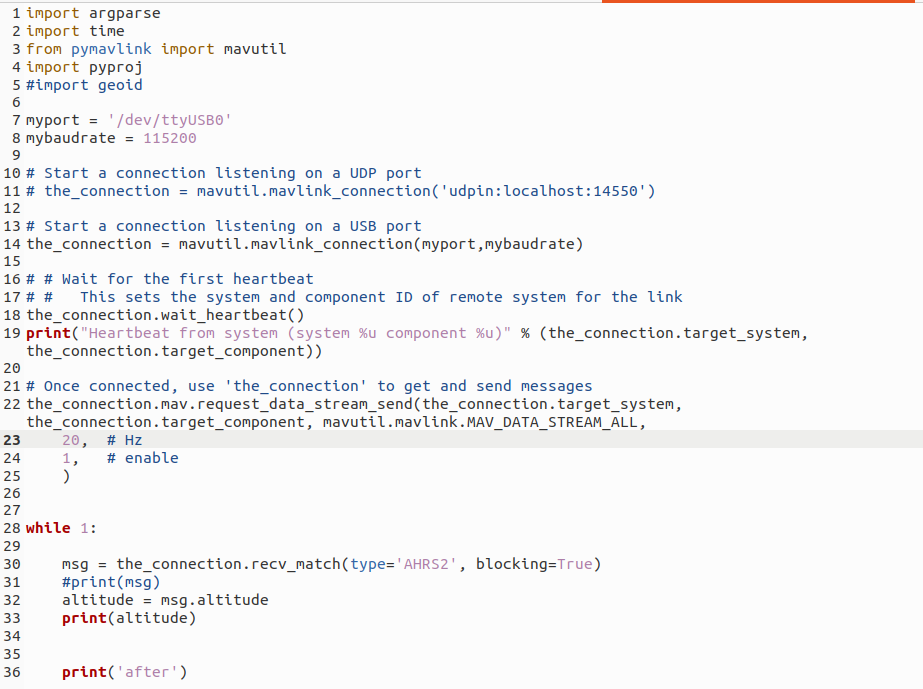
This is my Code :
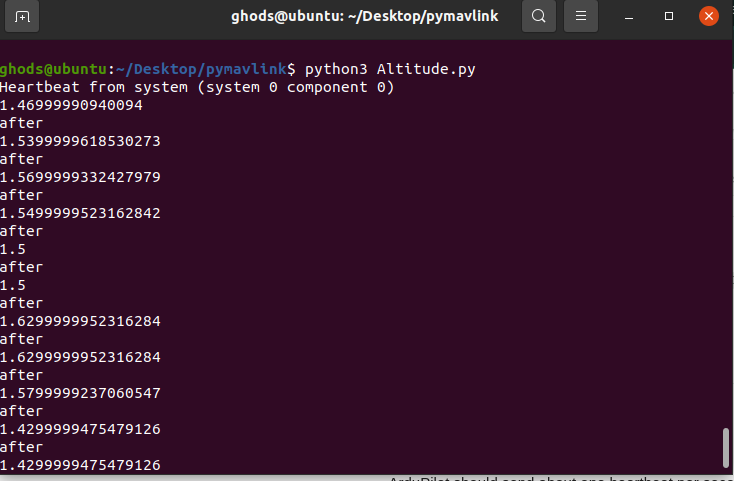
Sometimes it works fine! :
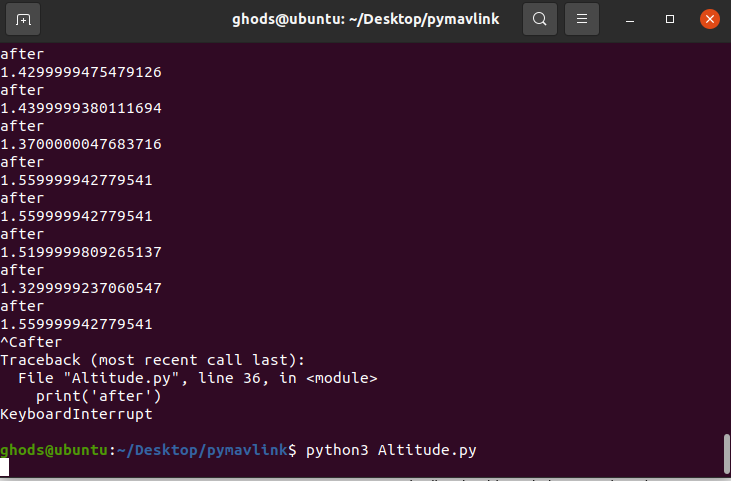
And sometimes it stuck on " the_connection.wait_heartbeat() " :
Can anyone help please?
Regards, Joe
@stephendade