Hi, I just have a problem about flow of UAV. in Guided or Loiter mode, the MP always warning:NO POSITION ESTIMATE!
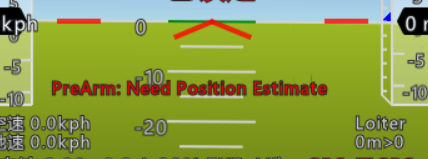
there is some basic parameters i set: EK3_FLOW_USE = 0;EK3_GPS_TYPE = 3(NO GPS);FLOW_TYPE = 6(UAVCAN);EK3_ALT_SOURCE = 1(USE RANGE FINDER)
Which firmware version. Can you post a .param file and a .bin log file?
1 Like
Thank you for replying!
I use this one:https://firmware.ardupilot.org/Copter/stable/Durandal
Now,I have basically solved it by changing EK3 to EK2. it works now.
You still did not answer my question. I asked what FW version, I did not ask which hardware version.
1 Like
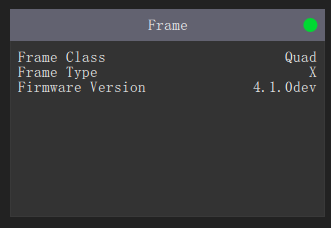
ok,do you mean this one?
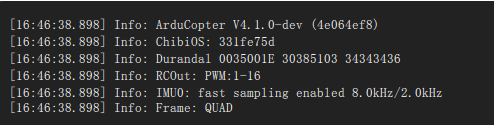
The firmware version also contains a “git hash” code that gets printed in the messages window every time you boot. Like this:
APM: ArduCopter V4.0.7 (32a80370)
APM: ChibiOS: d4fce84e
That 4.1.0dev might be very outdated. where did you get it? when did you get it?
Can you update to 4.1.0beta6 ?
1 Like
I got this version LAST DECEMBER from https://firmware.ardupilot.org/Copter/stable/Durandal
my supervisor thinks that the beta version is unstable.So we don’t update it.
Funny. The Dev version you are using has everything from Beta plus a lot of other features not thoroughly tested.
1 Like
I’m sorry, I’m confused with these pictures. This is the version we used before.

4.1.0-dev is the unstable version from Last December.
Anyway, I’ve solved the problem, thank you! 
So how many version type exactly there are?dev,beta and stable?
what is the exact relationship between them?
Stable-Full tested, current official version.
Beta-Added features and fixes that are tracked in the Changelog. Testing phase but generally Stable.
Dev-Development of new features/functions. Not necessarily Stable, some risk.
1 Like