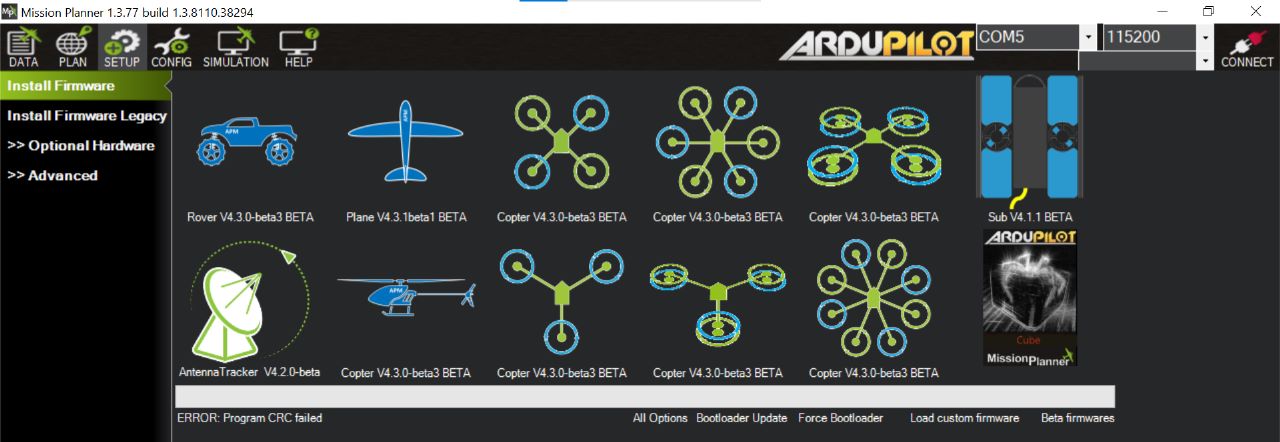
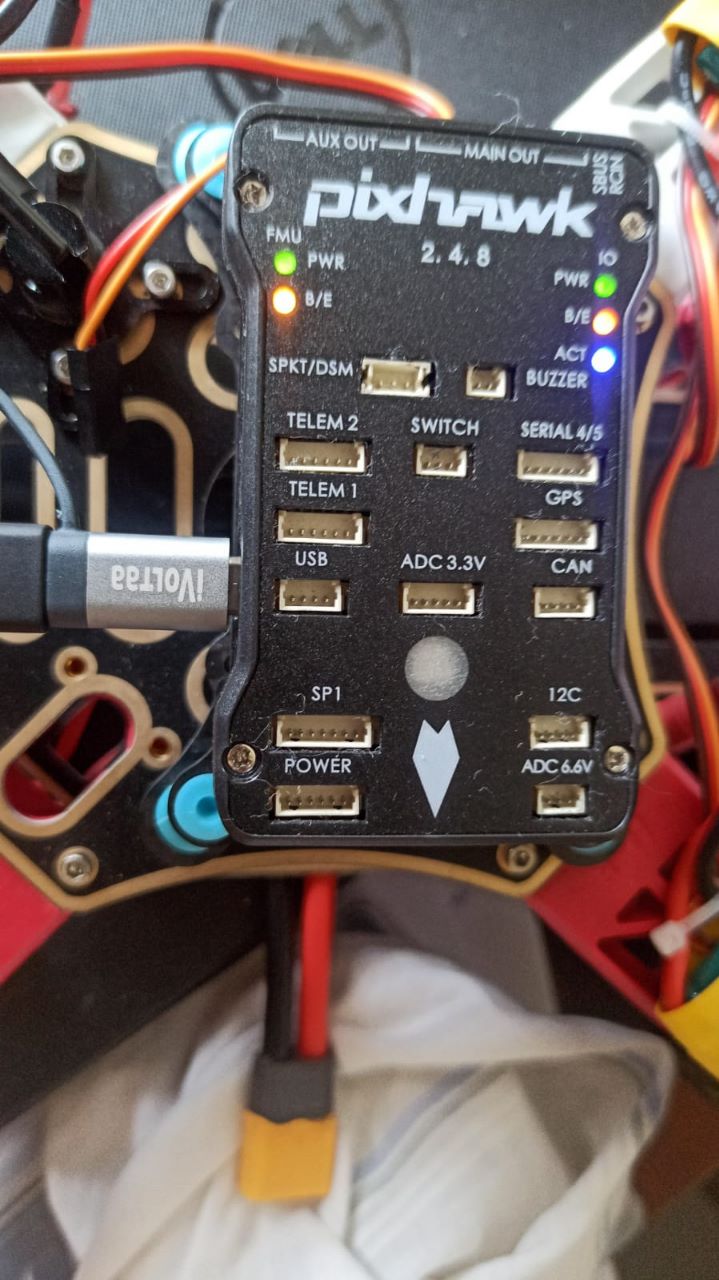
I recently bought a Pixhawk 2.4.8 kit for building an autonomous Quadcopter. In that, I received a Pixhawk 2.4.8 Board which has an STM32 F4 ARM Cortex microcontroller. I am using mission planner software to upload firmware to the board.
I am able to see the com port, the device name is also detected in the setup section but when I go to upload firmware at the very end of the upload I get an error.
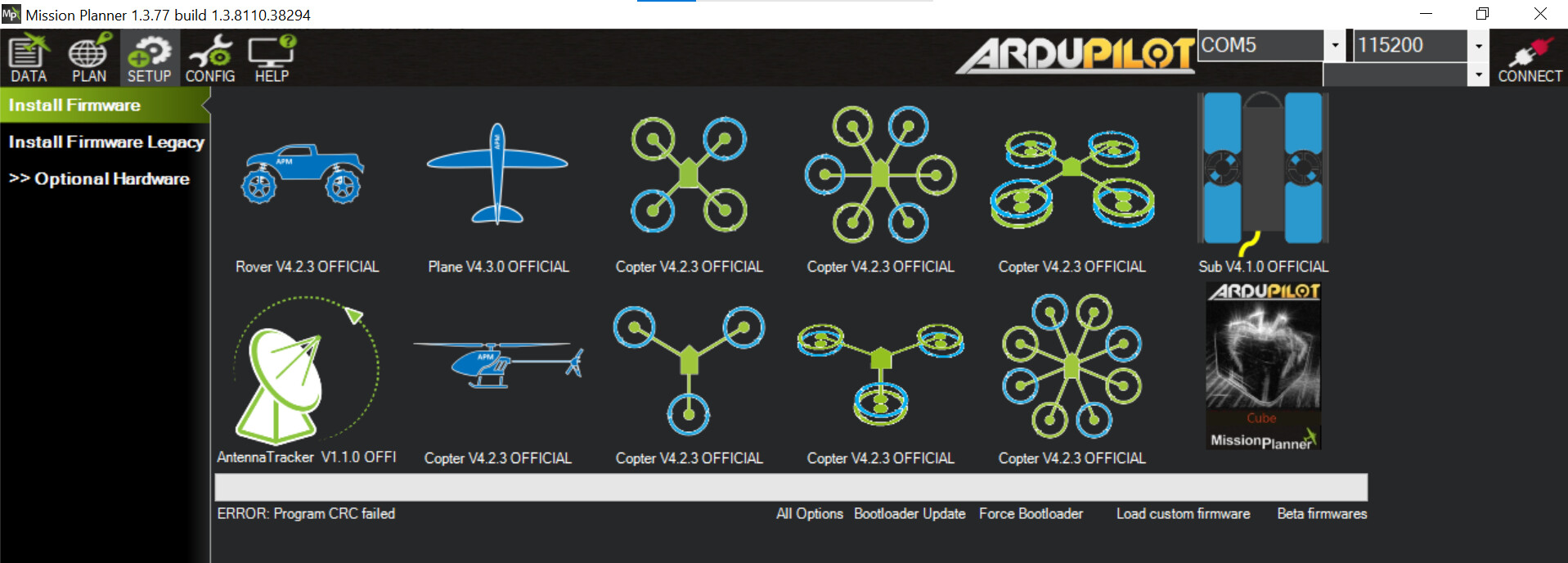
Program CRC failed (CRC stands for cyclic redundancy check). I have been stuck at this stage for several weeks trying pinpoint the problem.
Now even my main led only flashes white once when I plug it into my laptop using a USB to micro USB cable. Mavlink is also not able to connect with the pixhawk and says heartbeat packet not received.
I tried various different versions of Mission Planner - 1.3.72, 1.3.69 and latest one to upload firmware and the former one gave me the same CRC failed error but the later couldn’t event detect my board.
I found an article on this forrum of someone who had crashed their
Hi dkemxr,
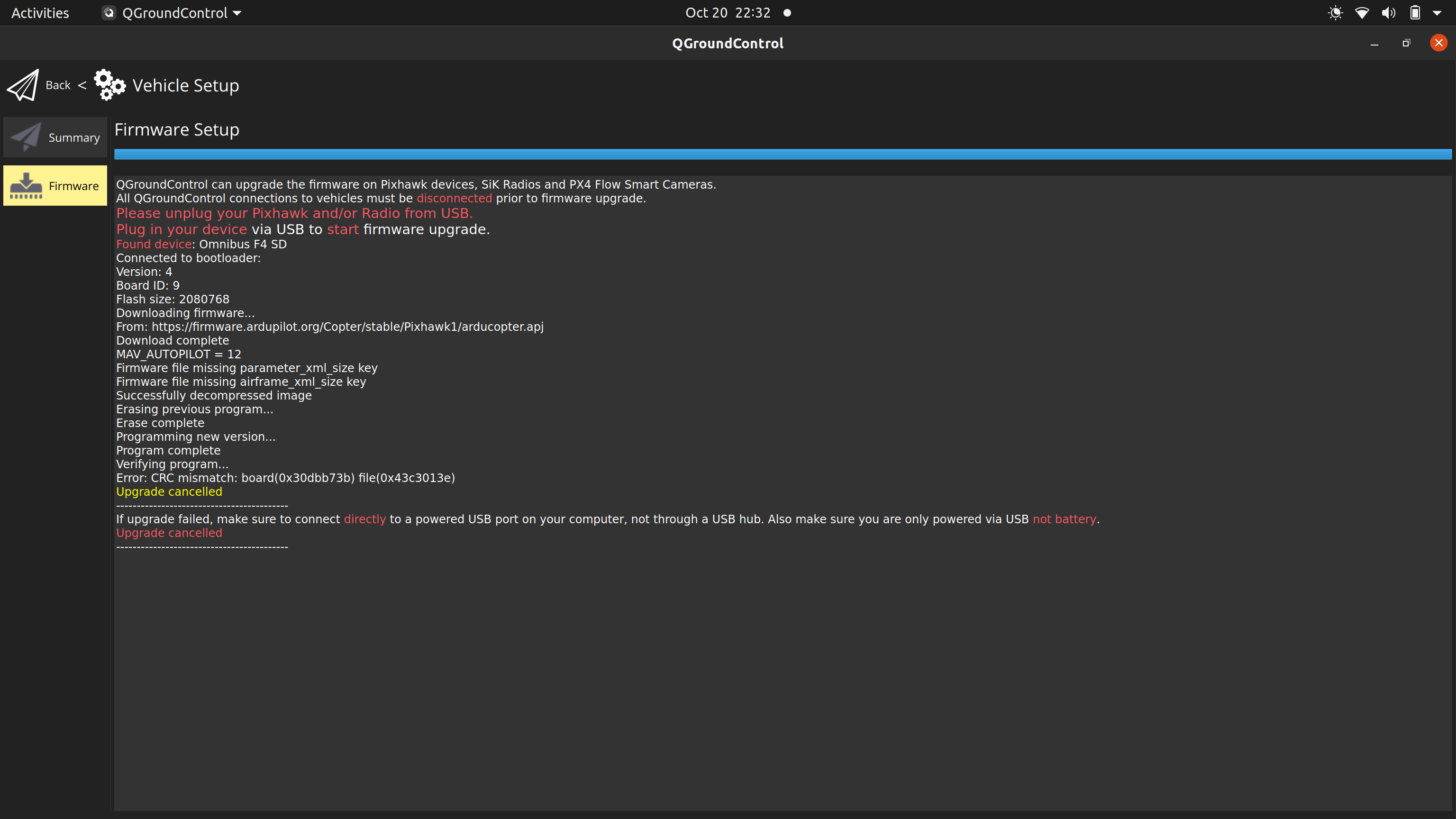
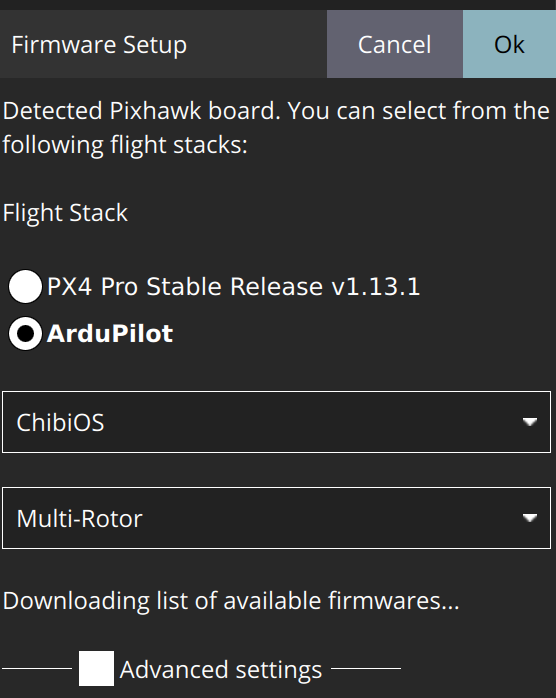
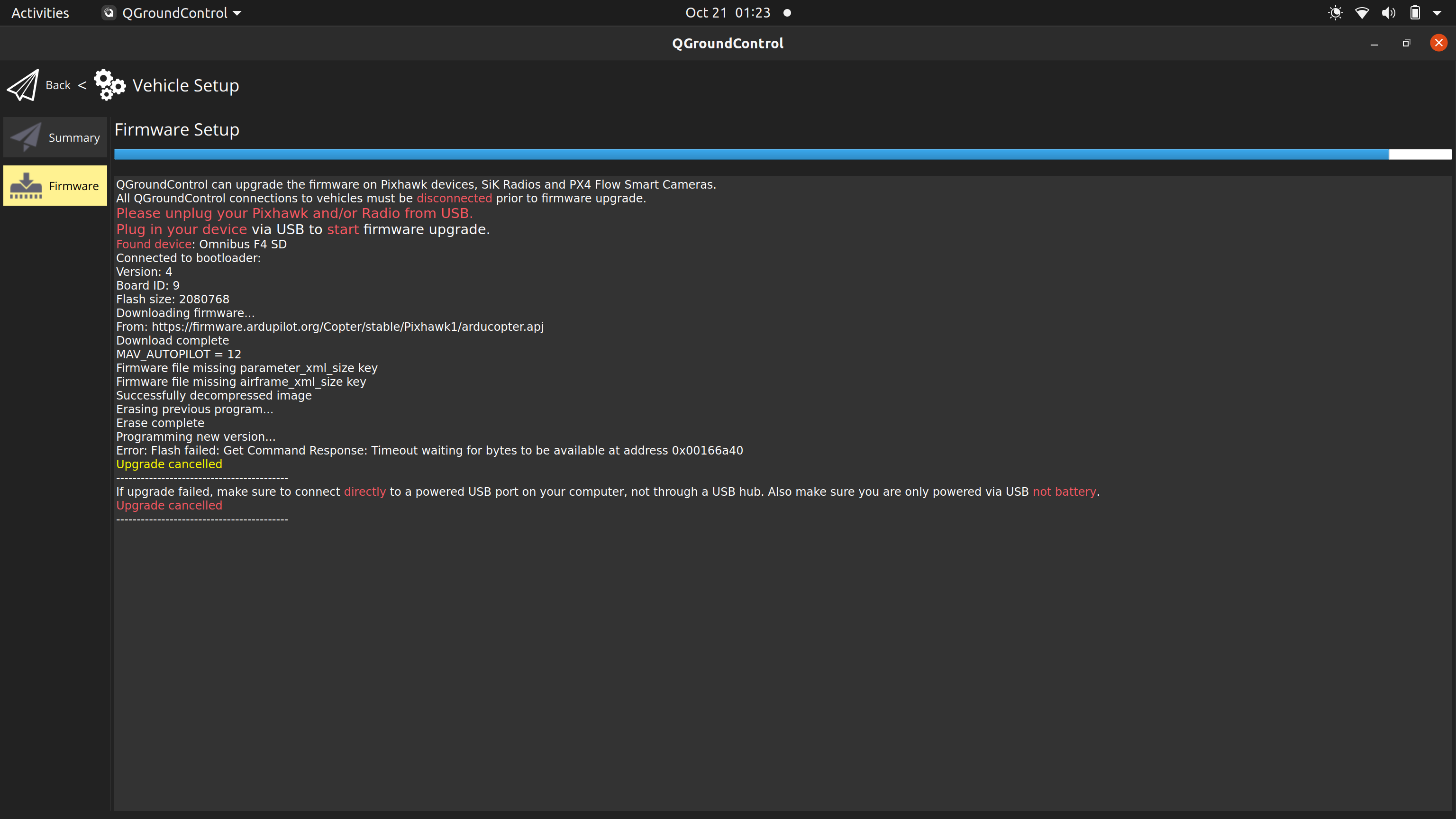
I tried using Qground control to upload fmuv2 multirotor firmware to pixhawk 2.4.8 as on the PCB board of pixhawk it says FMU v2.5 so i chose to upload this firmware. I got the same CRC failed error. but now the main LED is glowing yellow and i am getting this response from the board.
Here are two videos about the upload process. Now the main led is glowing yellow.
Pixhawk1 is the correct firmware for that Flight Controller. Download the .apj file from here: Pixhawk1
Then use Mission Planners “load custom firmware” and select that file.
I am getting program CRC failed error when uploading pixhawk1 using mission planner.
In Qground Control I am not getting the options to choose the firmware it says it is downloading list of firmwares.
Now when I connect my pixhawk to my battery I get a constant red LED. https://drive.google.com/file/d/14AJW6NbsK4fUfpYoQI6BuEYCSAuz-AAi/view?usp=sharing
^Here is the video.
I think my SD card might have issues because when red led is constant and CRC error came for some person they had to change SD cards (if someone can confirm this it would be good).
Can you share the procedure for after reformatting the SD card.
I have seen some video about reformatting SD cards in FAT32 file system so just doing this is enough for pixhawk or some additional steps are also present?
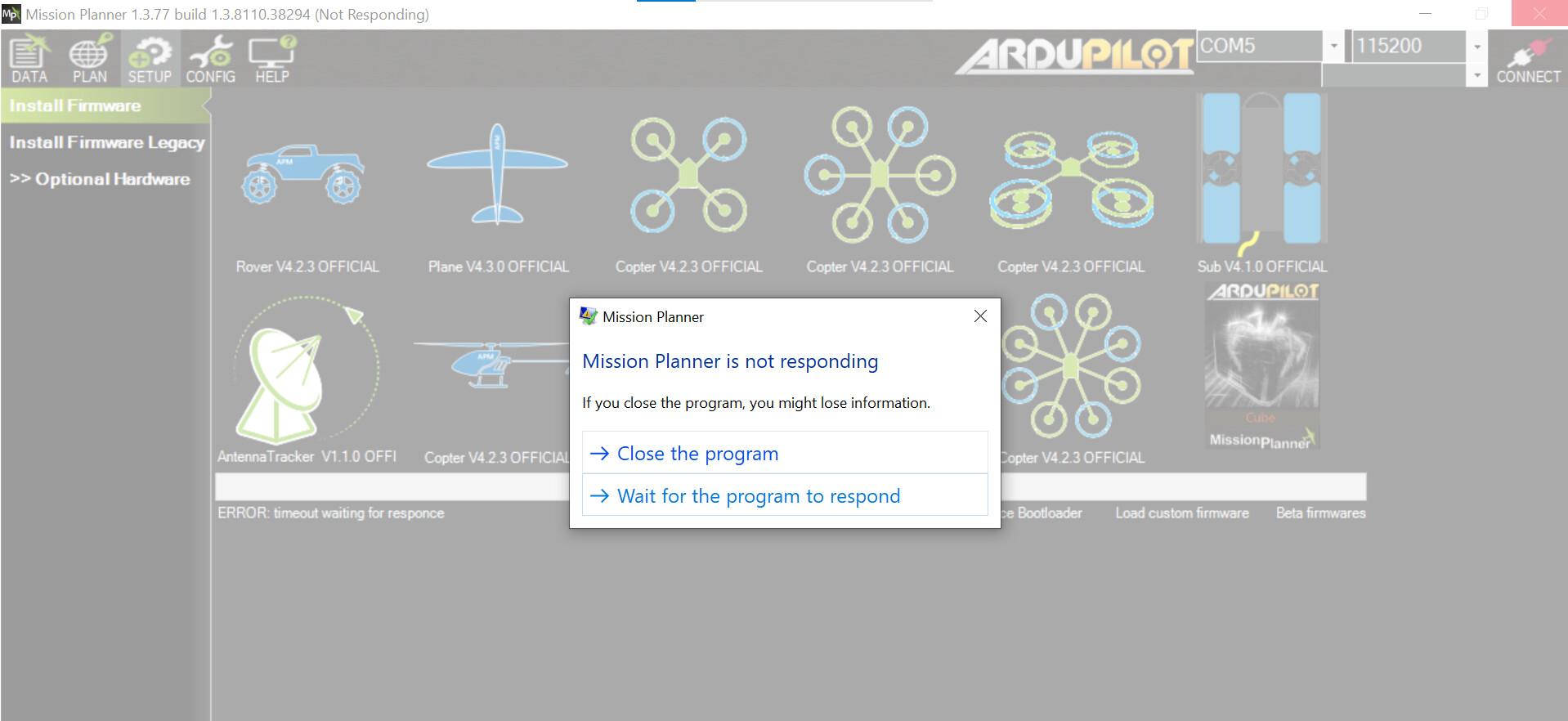
I used mission planner to upload the .apj file you shared me and also tried doing the given pixhawk-1 firmware upload but it is giving connection timeout error after which mission planner stops responding and has to be restarted.
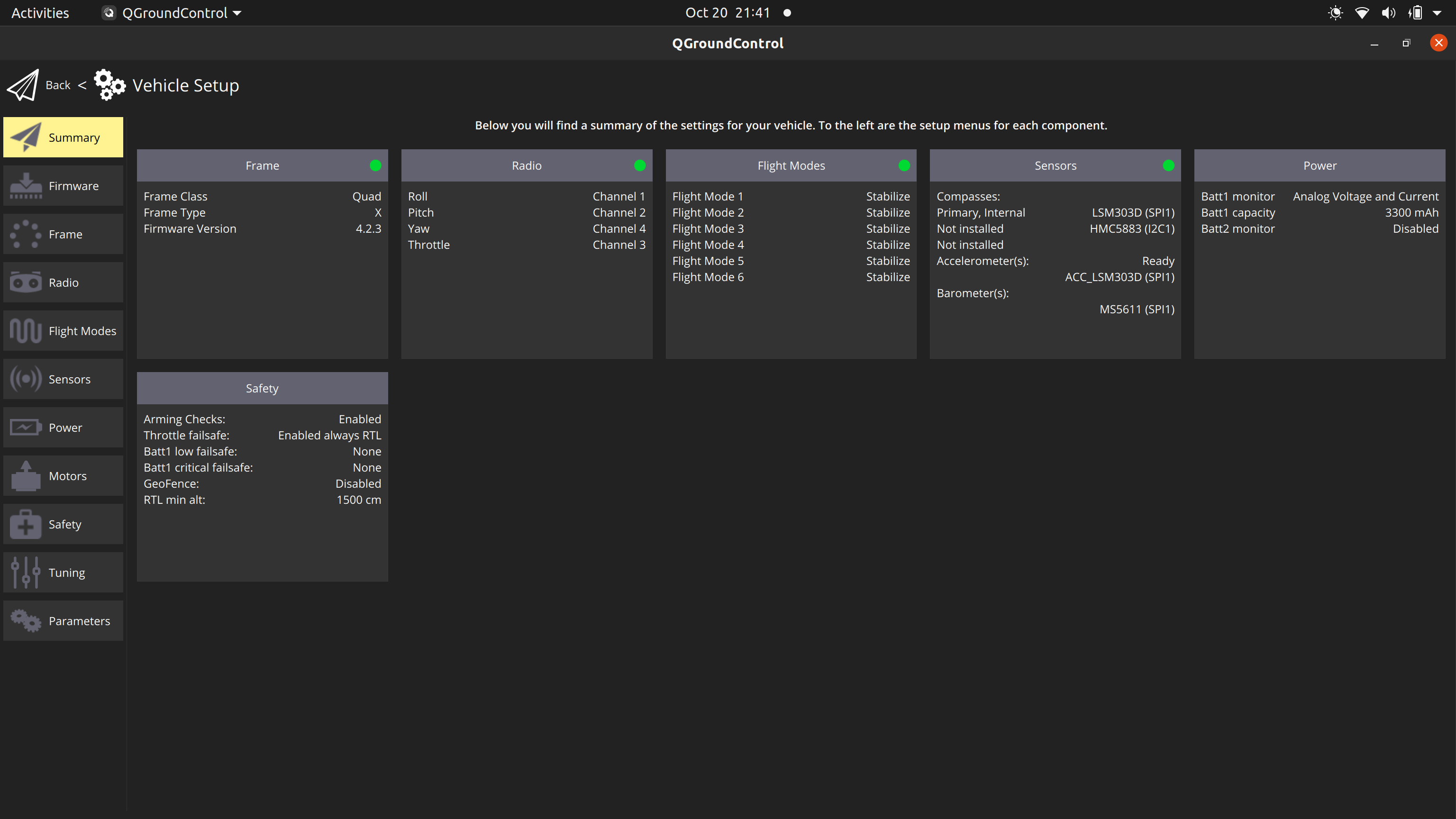
Hi dkemxr,
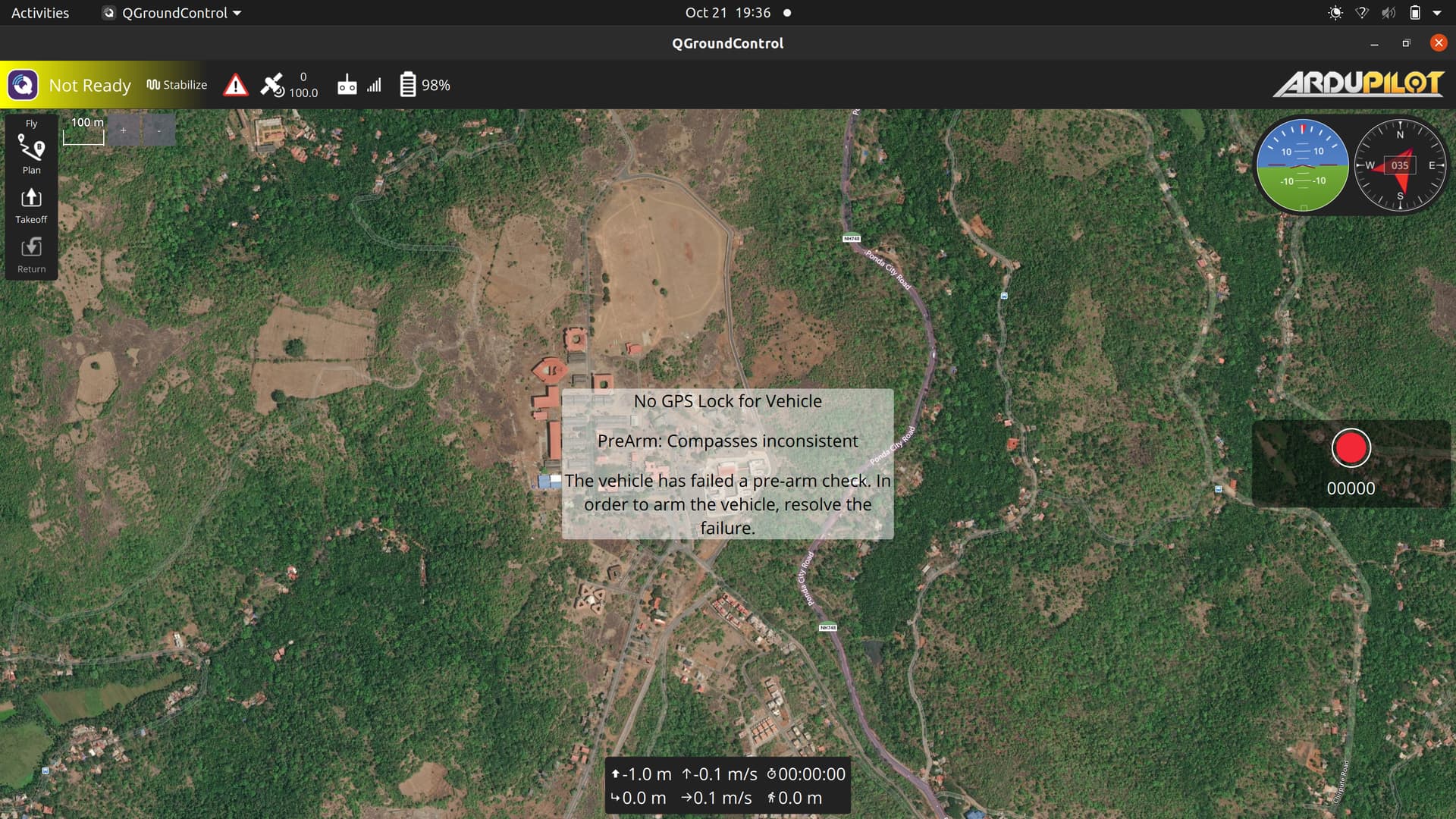
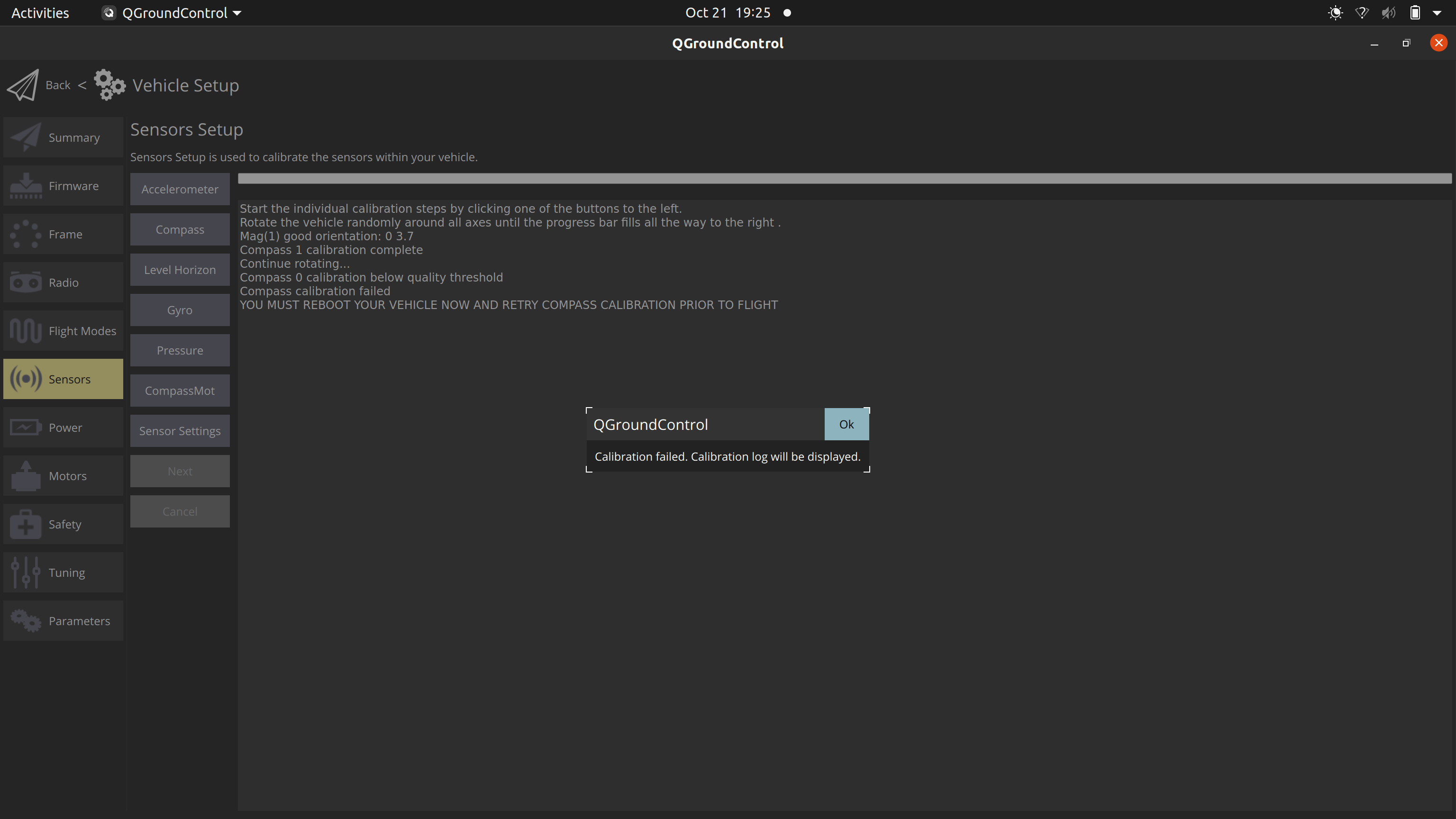
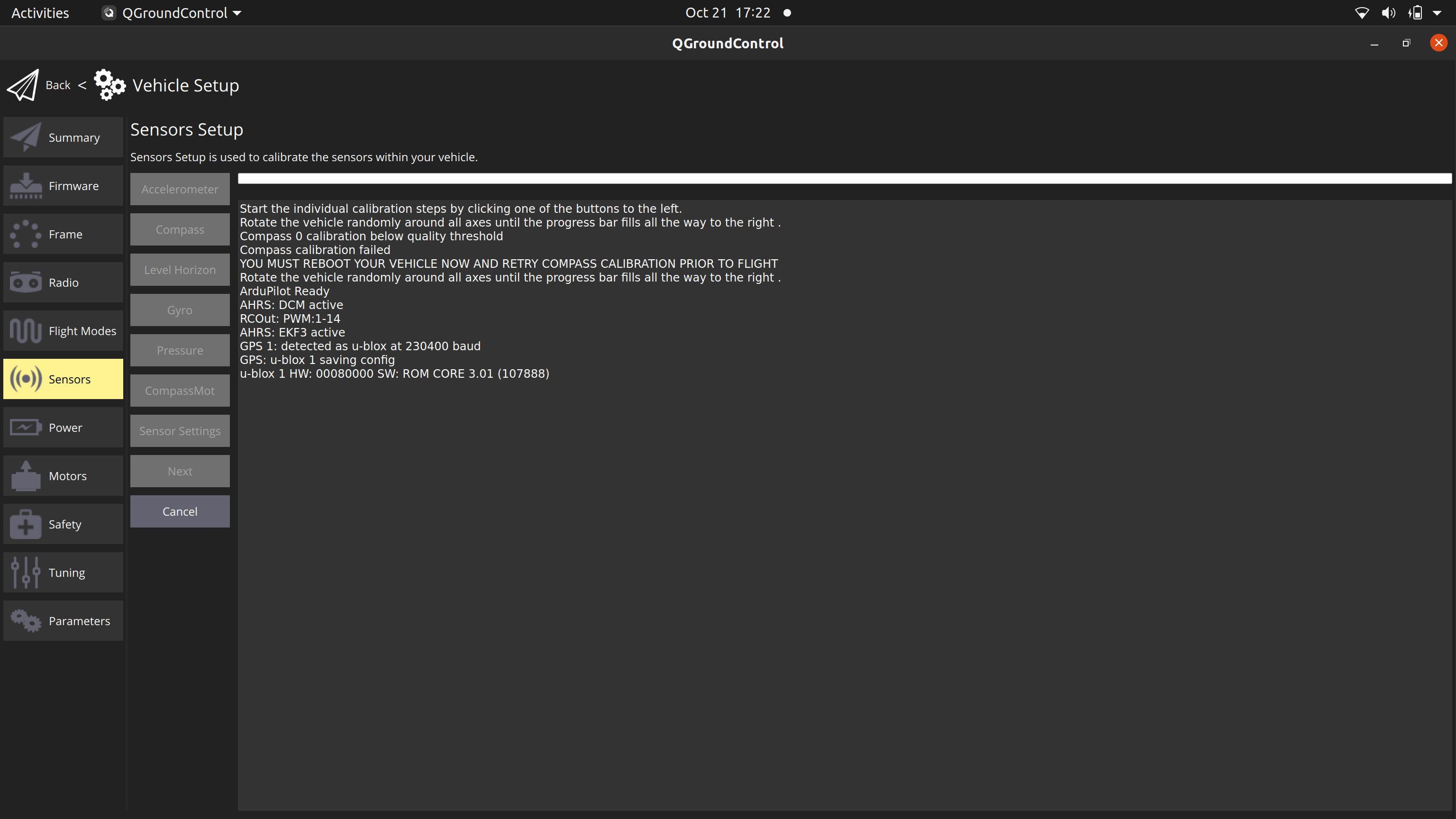
I was trying to calibrate my pixhawk using Qground control. The firmware upload stage had completed the programing part but failed the update stage. I am able to use mavlink and connect my pixhawk and can also see my location on the map. I was trying to calibrate the various things in my quadcopter but the GPS calibration always fails after the progress bar reaches full and I am unable to get a GPS lock. In motor calibration step as well I am unable to operate all motors together but I am able to test each motor individually.