@OXINARF @fingadar
Regarding ‘precision Loiter’: it is not too challenging to add this feature to the Loiter mode; however, I completely understand if the developers do not think it should be there. We added this feature to Loiter mode in previous customized firmwares, but there has been much more demand for the precision landing feature.
Perhaps the guided mode might be a good alternative “home” for a hover-based precision landing mode. I’m just putting ideas out there, I don’t really use either so have no vested or educated opinion.
One thing that might be useful would be to add something about the state of the lock to the drone telemetry stream. It is very useful to know how much “error” there is in the landing sequence remotely. Both for programmatic feed-forward error correction on the part of the ground segment as well as for testing/development.
I don’t think adding it to Loiter mode would be rejected. It will subjected to review like all PRs but I think that if done right it can go in without any issue.
1 Like
I was wondering if anyone could retest -rc7’s precision landing with a lidar attached? I personally use the SF10B (50m) but you know… anything is fine. It’s all working fine for me but I’m just one person!
Retested, worked great. Although I had a crash and subsequently I would occasionally get “Bad vision position” message. Unclear why. Harness checks out, could be bad solder bridge post crash. But certainly the software seems to work well.
Tested IR lock with RC7 today. I experienced heavy drifting after the drone came down to 30-50cm in every attempt.
I did not have this problem with RC5.
See video: https://youtu.be/A_Z-rZNrz4c
Did anybody test precision landing using an ultrasonic rangefinder instead of a lidar ?
Thanks for the feedback @mtbsteve! I will see if I observe similar behavior on Tuesday’s testing. Do you have an rc5 firmware saved, or do you know where it is located in the archives?
I have added both of your videos (rc7, then rc5) below for reference.
… also, it would be good to see log files. But everybody says they are too large. 
Don’t have access to my copter right now.
But what I noticed is that the drifting happens only at very low altitude (sometimes even down at 20 cm), and each time when the Pixy looses the beacon from its FOV.
Also my landing speed is getting very low once the drone came down to about 1-1.5 meters.
I have set RNG_FND_MIN_CM to 20 for my Lidarlite and LANDING_SPEED to 30.
Thomas could you please check if this could be an issue?
A dataflash log would be good to have as well, I’ve asked Jonathan if he can have a look… but I’m sure he’ll want to see a dataflash log.
Low landing speed is intended behavior. It slows down when it is right above the target.
Please send a dataflash log for the drifting. Can’t tell what is happening from the video.
@jschall @mtbsteve The slowdown only happens when the rangefinder has an altitude and if it’s above 35cm and below 200cm. So the behaviour is normal. The horizontal position control still continues below 35cm so that doesn’t explain the drifting.
https://github.com/ArduPilot/ardupilot/blob/master/ArduCopter/control_land.cpp#L199
I had a successful precision landing test with “V3.4.1” from Mission Planner (Nov1):
Copter: IRIS+
Flight Controller: Pixhawk
Rangefinder: SF10/A
Here are my log and parameter files:
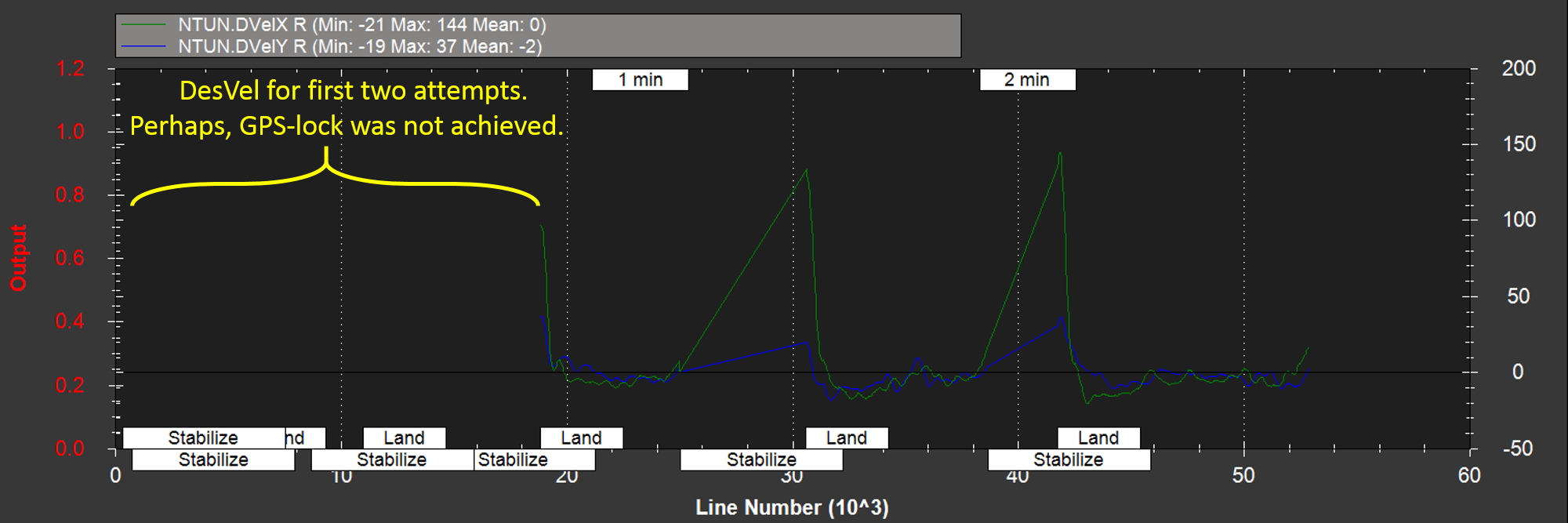
Log Analysis Image:
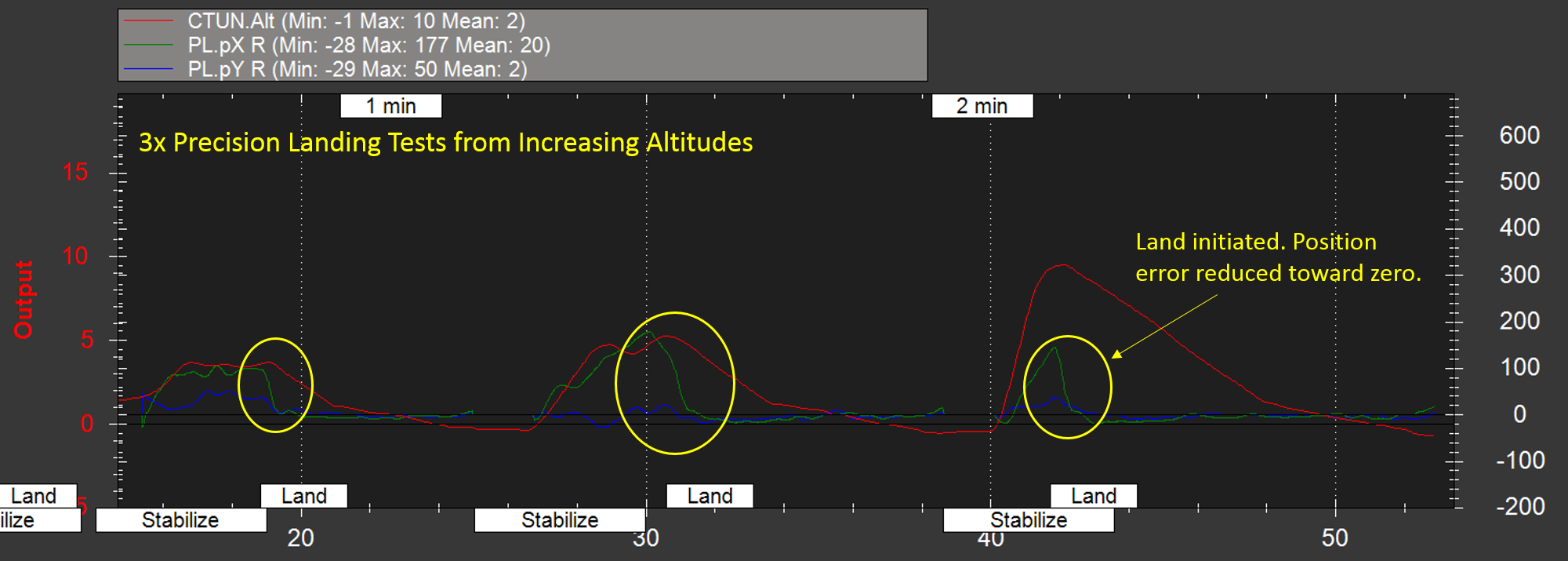
However, on my first two attempts, the copter did not respond as expected when Land was initiated. Perhaps, a sufficient GPS-lock was not yet achieved (although, I think I saw a green light).
Sorry for the delay in response @ThomasSFL @rmackay9 . Here is a logfile with several Landing attempts.
https://1drv.ms/u/s!AnKeW8KMoCcyij7su0lQ6yV44h7_
All values look good to me - Heal is always 1, TAcq is always 1 during the land operations. But: when its windy, the copter all of a sudden drifts away when altitude is lower than about 30-40 centimeters. When its windstill, landing is spot on.
I use a LidarLite V1 rangefinder connected through PWM and run AC 3.4.1.
Thanks for the log. I’ve had a quick look but I think it’s best if @jschall can have a look so I’ve ping’d him.
There is some difference in how the last part of the landing is handled so I suspect the issue is there.
Hey I have an identical issue. Just looked at the position error. I did about 4 landings in windstill and the last landing was done in a light breeze. You can see the peak to peak error in position go from -10:10 to 0:40. So that’s both a bias of 20, as well as a doubling in the overall peak to peak magnitude of the controller.
Only difference between the flights was minor breeze. And ostensibly the battery was a bit lower but it was still around 50-60% state of charge at that point, can’t see that having a dramatic effect.
Data here (upload failed): https://www.dropbox.com/s/vw7ugq7xws56ptj/6.BIN?dl=0
Here is a video from my flights of yesterday.
Copter focuses nicely during the descent, but then there is an issue with IR Lock once the copter comes down to about 0.5-1 meter in altitude. Descent stops for a couple of seconds, and then the copter drifts away with the wind during the remaining decline.
Precision landing works when it’s windstill, but not even with slight winds.
Other than that, AC 3.4.1 works absolutely great!
@jschall would be great if you could have a look at the issue.
Thanks!