My drone has problems to maintain a solid position in the automatic flight modes, I have configured my gps through “u-center” with the following data:
Baudrate = 115200
Dinamic Model = Airborne4g
Measurement Frequency = 10 hz
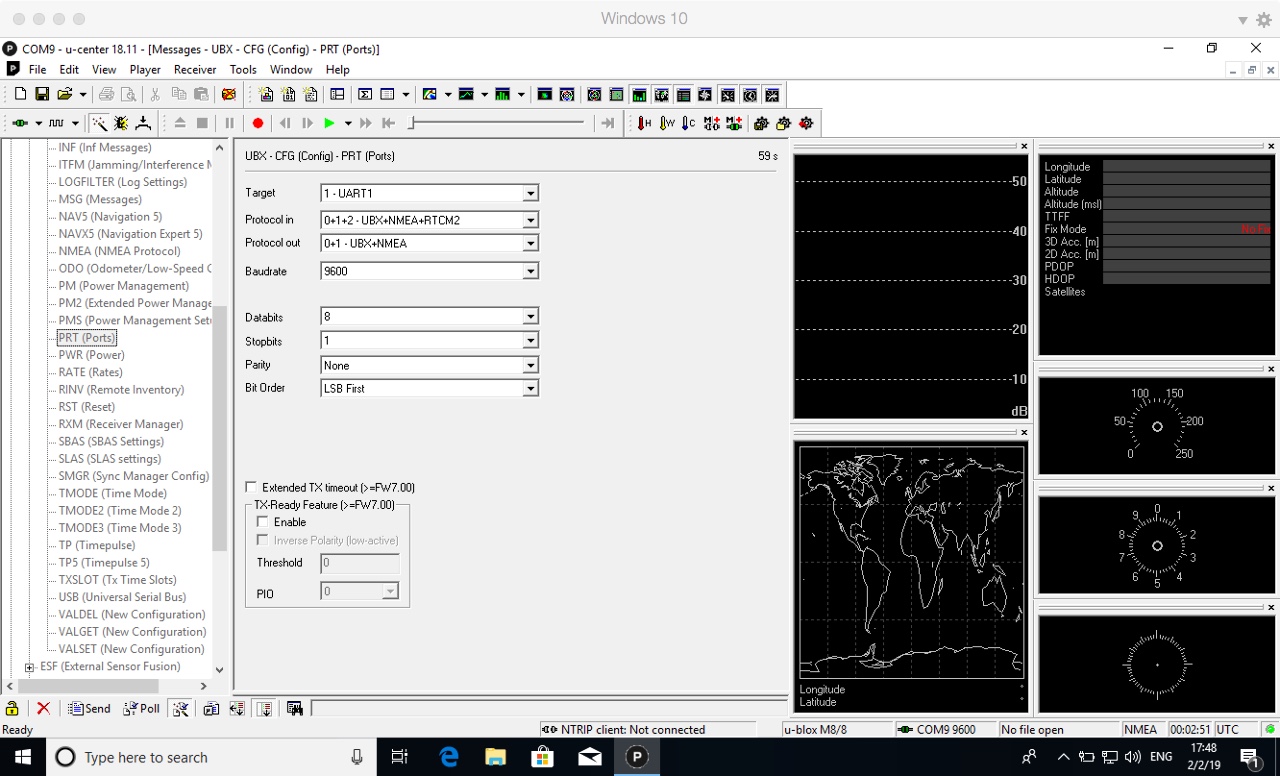
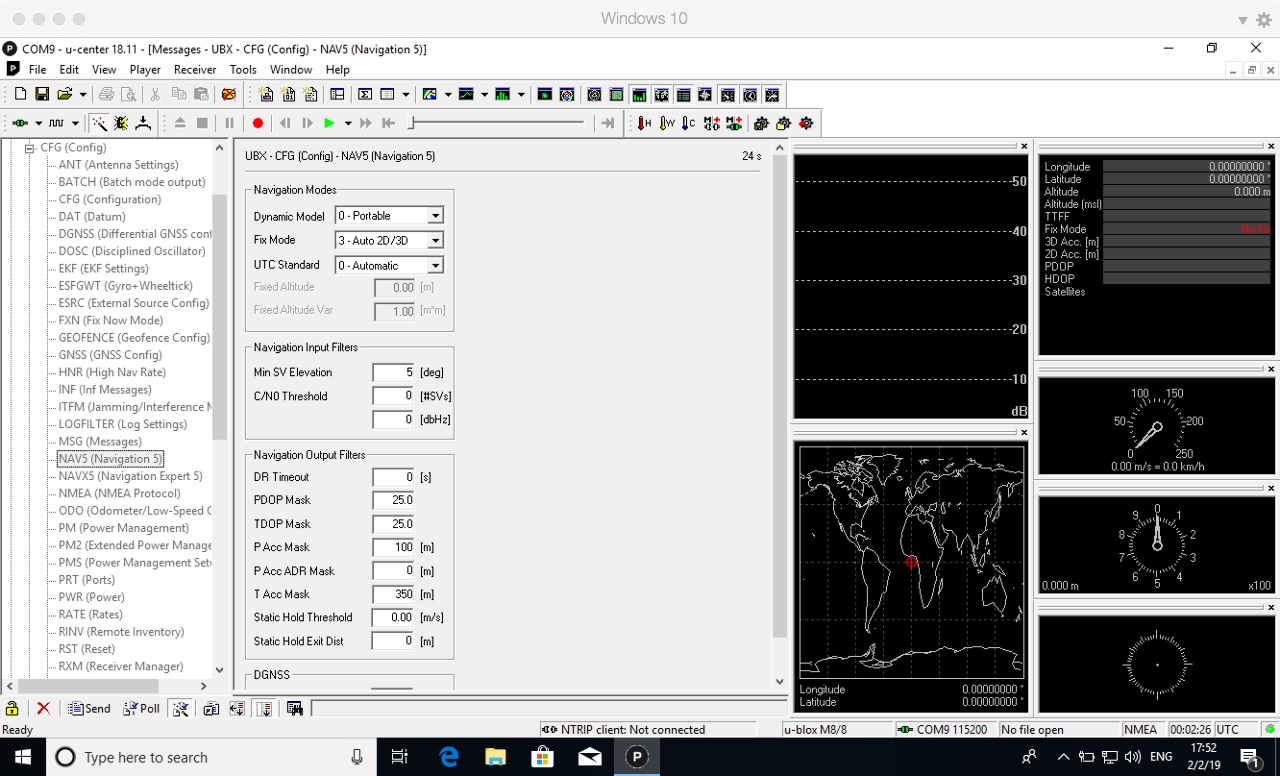
but after connecting the gps module to the flight controller and performing several test flights I begin to notice an unwanted horizontal movement, then when connecting the gps module to the u-center, again the parameters have changed to:
Baudrate = 9600
Dinamic Model = portable
Measurement Frequency = 1.000 hz
I have disabled the parameter “GPS_AUTO_CONFIG”, changing its value to = 0, causing the flight controller not to establish a successful connection with the GPS module, even though it is receiving enough satellites with the green LED flashing.
It seems your gps does not retain configuration. (9600/1Hz is the default). Normally this should not be a problem, since autoconfig works perfectly with ublox gps.
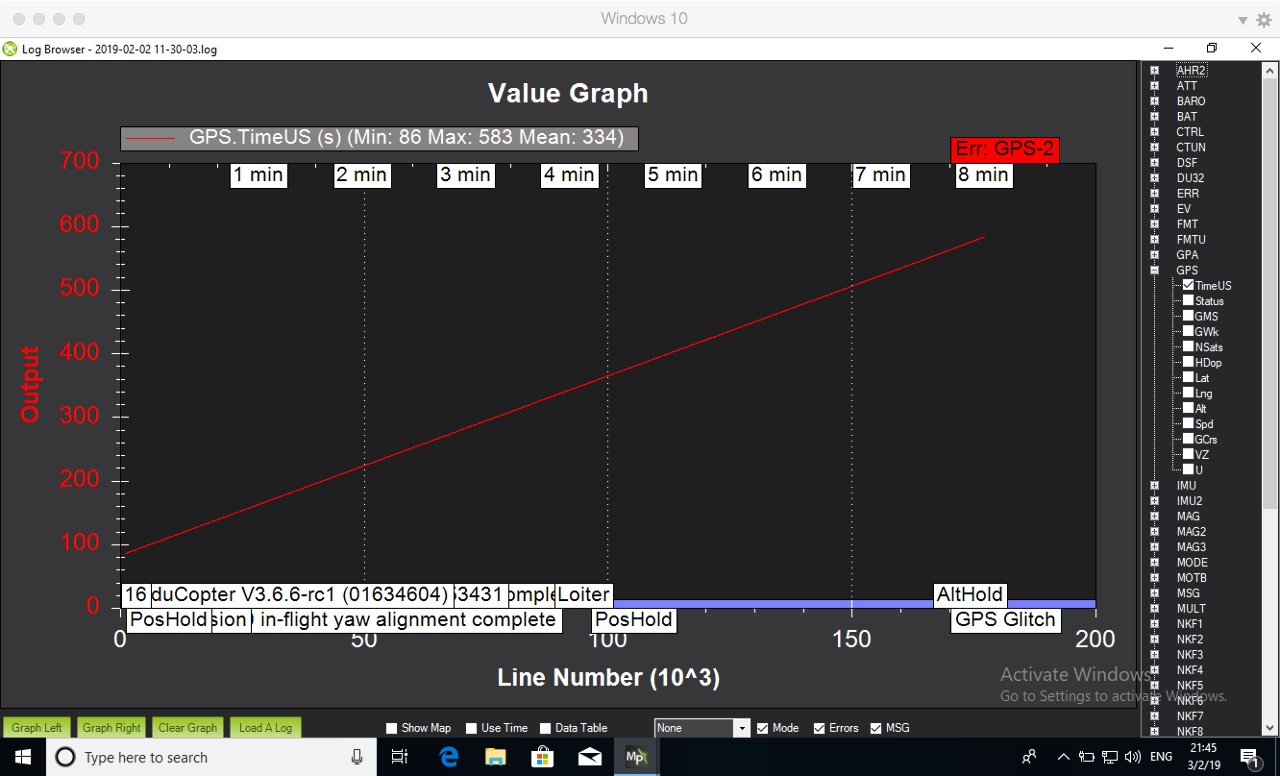
To get your refresh rate check the GPS.timeUS field in the log.
Switch on the data table view, find a GPS entry, note the TimeUs then go to the next GPS entry in the table, subtract the next TimeUS from the pervious you will get the time difference between two GPS upadates in uS. It should be around 200000 (5Hz)