Hello,
I am just completed a diy drone using Pixhawk 4 as the flight controller. I have been successful in configuring the Pixhawk 4, with the exception of setting up the fail safe. I am using a Flysky FSi6x. I followed instructions for setting up the transmitter to have channel 3 fail safe on at -102%. However, when I attempt to arm the flight controller, with radio fail safe set to RTL this is a sample of the messages I get:
PreArm: Yaw radio min too high
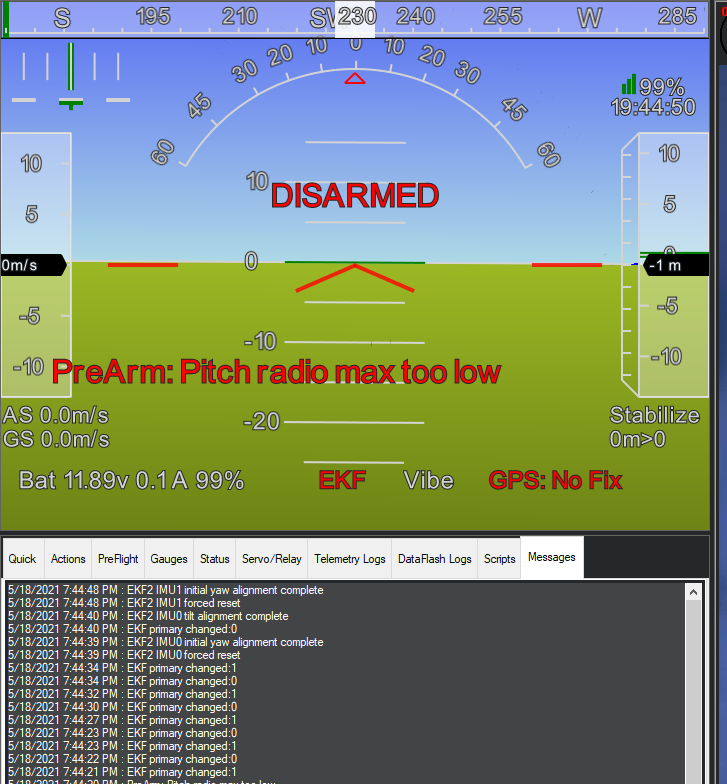
PreArm: Pitch radio max too low
PreArm: Pitch radio min too high
PreArm: Yaw radio min too high
PreArm: Pitch radio max too low
PreArm: Pitch radio min too high
PreArm: Check FS_THR_VALUE
In the radio fail safe section there are instructions for setting up the fail safe either by using the low-throttle method or the signal-loss method. I have tried following both instructions. When I try the low-throttle method, I am unable to arm the drone and have the accompanying messages listed above. When I disable the radio fail safe, I am able to arm the drone.
I would appreciate any advice or help that you can provide.
-David