I have built and flown ARDU planes for around 3 years. I now can’t arm the new model. It is fitted with a KaKute H743 wing V3 controller. When powered it passes all test in QGroundControl and will do the 6 flight modes but refuses to activate channel 7 (set to arm/disarm for ver 4.2…) For the arming procedure I use the Logical switches routine of Sticky to Edge which has worked in previous models. I am at a loss and I hope that the information given is adequate. My TX is a RadioMaster TX16S Mk2 running EdgeTX Ver 2.10.5.
So you try to arm via RC-channel 7 configured to arm/disarm and/or to arm via rudder stick to full right / left. Your description is not clear to me.
Also best is if you can provide your PARAM file or a .BIN Logfile with LOG_DISARMED enabled
Thank you for the prompt reply. I will send a message and the PARAM file later today. I was unaware of the Rudder arm/disarm method and will certainly follow that up as soon as I can.
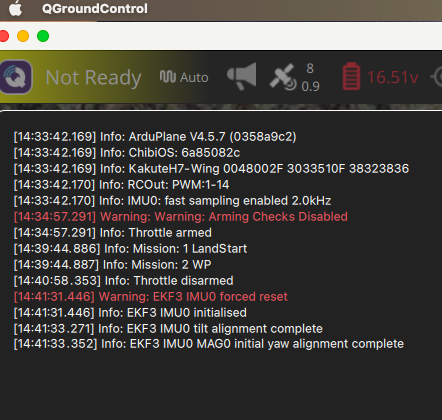
I am sorry to say I still can’t arm the Motor. Hopefully I have the parameters for Rudder Arm/Disarm correct. I am attaching 2 parameter files the first before I changed anything and the second after I made changes. I am also including a screenshot from QGroundControl that may give you a clue. I know that my flight modes are correct and working in QGroundControl so are the control surfaces move as planned. So my TX is talking to the flight controller. Further I also detached the throttle connection on the flight controller and hooked up a servo tester and the motor runs so the ESC is working. I would prefer to use the Rudder arming to switch arming. The H743 FC was used in two previous Models and worked flawlessly. KK 1.txt (32.4 KB) KK 2025-01-02 2.txt (32.4 KB)
Hi Hank,
Your above shown picture shows that for a short period (around 1 sec) the throttle was armed.
As I am not working with QGC (not installed right now) I only can look to your files with a simple texteditor.
Did you calibrated your RC System on the FC?
Which PWM range you used on your servo tester to run the motors?
What ESC you are using and is a calibration to this ESC necessary?
I think @Juergen-Fahlbusch is on to something, that the plane did arm for a second and then disarmed. Can you share the .bin file for that attempt? Since the plane didn’t actually fly and was only armed for a second the file might be small enough you can post it here. Or you can get it to me otherwise if not. The .bin log should have the reason for the change in the arm status.
QGC is the only practical ground station on a mac, I also have a version of Mission Planner but it is not totally (for me at least) easy to use.
Yes I have calibrated the RC on the FC
950 to 1950
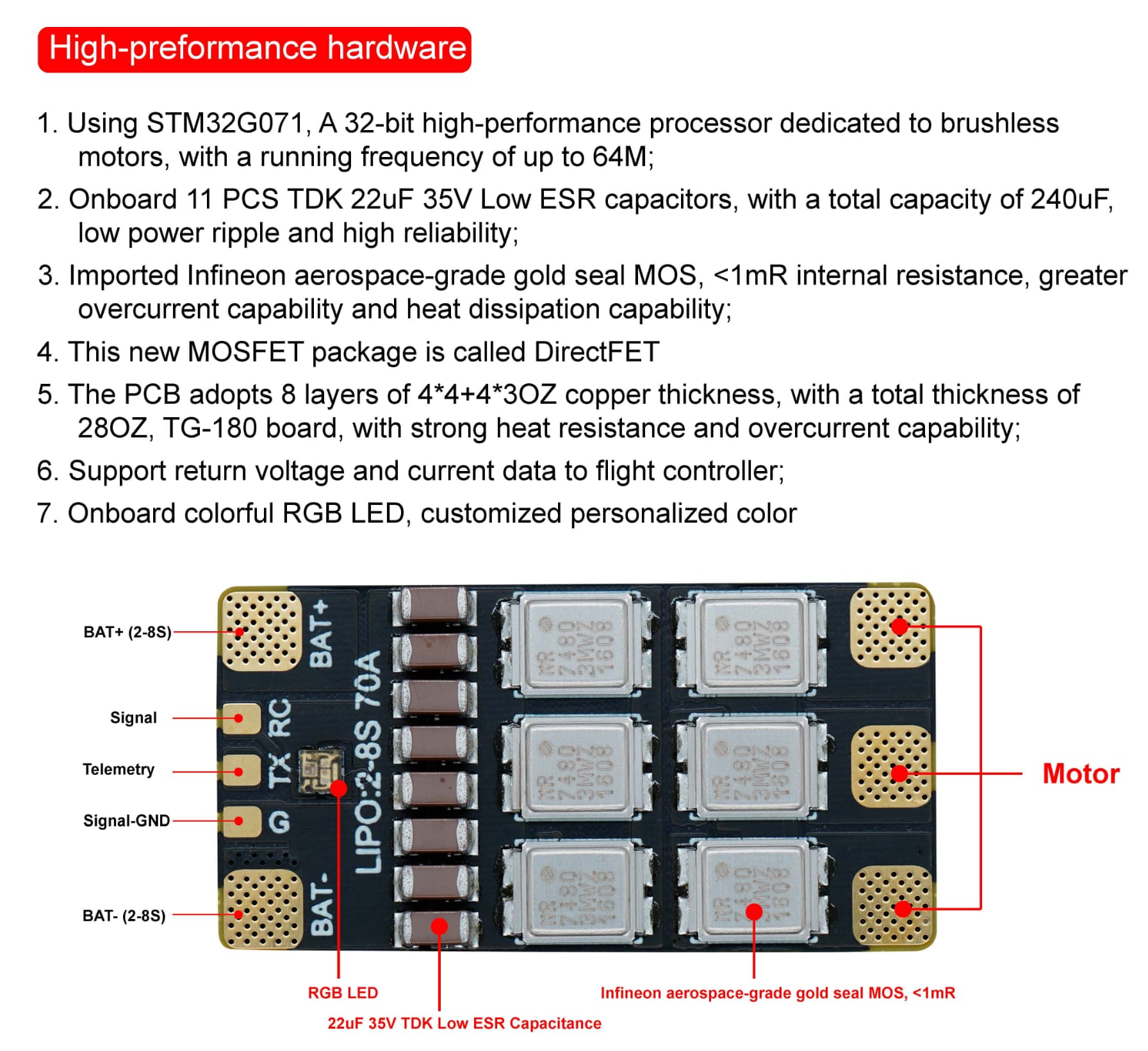
I am using a 70A BLheli ESC, I have the technical info in my building shed and will forward it later today.
Your statement “shows that for a short period (around 1 sec) the throttle was armed” interested me. I wonder if I have a program problem with my model? This is the first model on the new RadioMaster TX16S MK. I programmed as close as I could to my FrSky X9D running open TX, but I have noted some subtle differences to EdgeTX Ver 2.10.5. I am in the process of making a new model on the TX and am steering away from Logical switches. It is not clear if I still need to put a mix on RC channel 7 if I use Rudder arming. I hope the .Bin upload will work. I could not upload the .Params file till I renamed them with the suffix .txt as they are essentially txt files which I subsequently load into a spread sheet to examine and even compare the file with a pervious file to find differences. Well that did not work, file is too large, more mind bending learning todo!
Hi Hank,
if you only can work on QGC it is ok, don’t change your known enviroment.
Is Your ESC controlled by PWM or by a digital protocol?
Normally no mixers on the radio transmitter should by used, so what is this RC channel 7 doing?
I think a .bin log file but with log_disamed enabled would be helpful for us
Thank you gentlemen,
I have the system working after replacing the NeutronRC Lighting 70A ESC. Although this ESC works when activated with a servo Tester (RadioMaster ST8) it would not arm via the transmitter. I replaced with a Racer Star 80A BLHeli ESC. I also have Rudder arming working. Thank you for your help.