So I have a problem that I have been struggling to fix myself so I am reaching out for help.
Here is my hardware list.
Chassis: LJI ZD550
Flight Controller: Pixhawk 6c
ESC: Speedybee 50A 3-6s BLHeli_S 4-1 esc - 30x30
Controller and Receiver: FS-i6x
GPS: Here 3+
Battery: 6s 22.2v LiPo
Motors: Sunnysky V3508
Telemetry: holybro Sik telemetry
I am trying to run my drone on ardupilot. I have the firmware on the FC. I have calibrated my GPS. I have calibrated my controller and receiver. I have calibrated my telemetry. Everything works on ardupilot except my esc and motors. I have a battery connection to a PM02 module that connects to the FC and also connects to the ESC by soldering with a capacitor on it. Each engine has 3 wires that are connected to the ESC which btw I’m using a quadcopter. From the ESC, I have the S1-S4 connected to CH1-CH4 on the I/o output of the fc along with the ground connection. I know the ESC supports dshot 300/600. I have tried to configure the ESC with both in ardupilot. When I go to the motor test in ardupilot most of the time the engines do not work and sometimes they work and don’t work. When I plug up everything my motors beep like they should work. When I run the ESC through the configurator online it says there is only one ESC present instead of it showing up 4 of them. I have tried just about everything online to figure this out but it doesn’t seem like many people use 4-1 and have problems like I do. Does someone mind helping me with this please? Last time I asked there were a few kind people who tried to walk me through this and I couldn’t get this after trying most of their recommendations. I am a beginner at this so I really have no expertise in this area. Thank you in advance!
The Arducopter Wiki page for that Flight Controller is more useful than the Holybro’s website as it’s targeted to…Ardupilot, not the “other flight stack”. Pixhawk 6C
You made the mistake of buying blheli_S ESC’s. So set these parameters:
SERVO_BLH_AUTO,1 (assuming at some point you want to connect to BLHeliSuite)
SERVO_DSHOT_ESC,2
To take maximum advantage of blheli_s ESC’s you would do the following:
Flash the Bdshot version of firmware to the flight controller.
Flash the ESC’s with Bluejay fimrware.
Configure Arducopter for Bdshot.
If that all sounds Greek to you then ignore it and continue along. Your next step after a successful motor test is to prepare yourself for the Configuration and Tuning Blog: “Call me Ishmael”
What does that mean “it only picks up one ESC and no motor rotation”? Sounds like you have a wiring/connection problem to me if Motor Test fails.
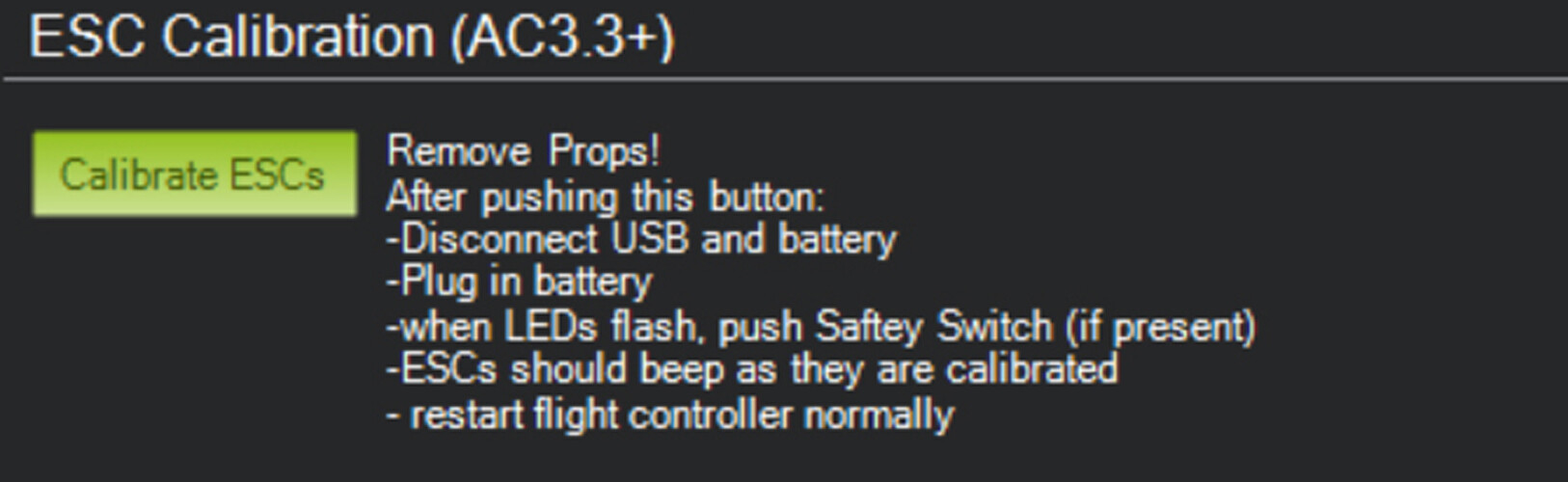
You have BLHeli_S ESC’s and they are configured for Dshot600 and you made the parameter changes suggested above right? If so no calibration is required. If a Dshot protocol is shown on the ESC Calibration screen in Mission Planner nothing will be accomplished by performing a ESC calibration.
Ok I am sorry I misunderstood earlier. I see now that you are saying if everything is correctly inserted they shouldn’t need an ESC calibration. It sounds like that’s the problem I have right now I will go check every connection and get back to you.
BLHeli_S needs calibration off my bench. I believe its a new problem that seems solved with the all in one calibrate. Can’t do any harm but has to be done correctly right?
I am down to try anything. This is my first drone and I’m not an expert in this field. Do you mind explaining what all in one configuration I need to do?
Off topic but part of our job is testing we are here find errors
I had a large 22" Silver Arowana that swallowed a gummy toy I was devastated. I went on a Arowana web site and asked what to do. People told me the fish would die, Then a zen member said you think you know but you don’t know to a negative remarks. He said stop feeding him and he will push it out. guess what that’s exactly what he did.
BLHeli_S configured for Dshot do not need calibration. It’s pointless to try. Nothing new, this has been the case since firmware version 16.7 which all ship with. Ardupilot BLHeli
BLHeli) is open source and 16bit. This is no longer actively maintained but the last published version, 16.7, is installed by default on “BLHeli_S” ESCs when shipped from the factory.
Well I defer to you. I figured it could help as to my testing. We seem to have reports of ESC issues a lot lately.