Hi together,
I have some trouble with the ground steering for a plane.
The settings I have done according to the manual and the start of the plane, a taildragger, runs very nice.
At current I start, fly and land in FWBA mode.
Problem come if I like to land the plane.
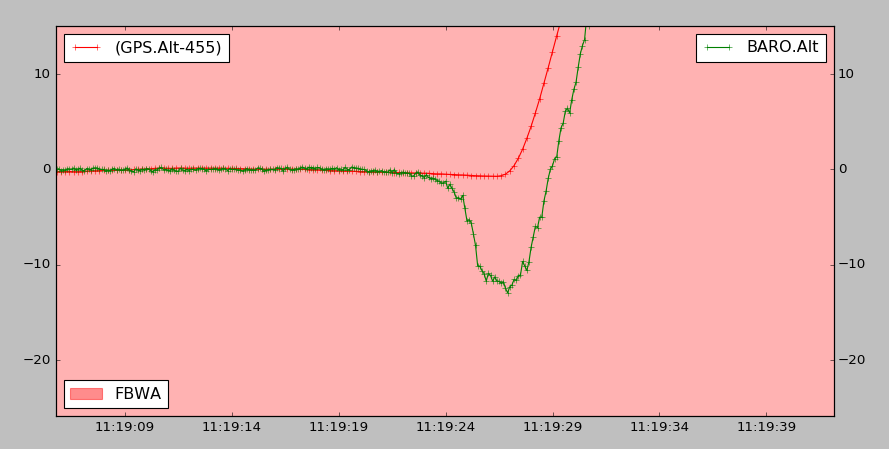
During the start the barometer change the offset or value to about -10m.
For ground steering you have to set the parameter GROUND_STEER_ALT to a value above zero.
For my case I choose 5m.
Problem during landing is that if the barometer value goes below 5m - regardless about the real hight of the plane the autopilot goes to ground steering and I loose the conrol over the rudder. Which I badly need for the final landing. More worse - the plane keep the direction at the moment he have had as the ground steering take over.
This flight ends in the fence and the plane get badly damaged.
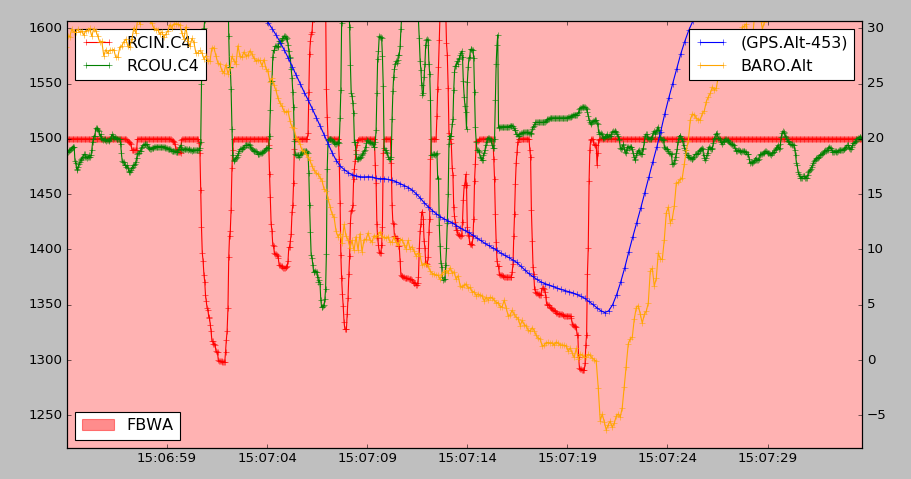
At the above picture you see the difference betwen GPS and BARO hight.
RCIN.C4 is the rudder channel.
At the manual is written that if the ground steering is aktive it locks on the compass (heading hold) and is only aktive if there is no rudder or aileron input.
Means for me the rudder and aileron input should be over the ground steering.
Seems something wrong here.
Some ideas how to come out here would be very kind.
The airflow inside the fuselage could be a reason for the drop down of the barometer pressure.
For cooling reason parts of the prop air get throug the fuselage.
I check this and will try to find a solution to keep the airflow away from the Pixhawk.
Thank you for the tip.
But the problem wiht the rudder is still there. Even if the barometer pressure is ok, I am not be able to control the rudder if the hight form the ground steering is reached.
If I steer the plane on the ground the rudder is full working. So why not during the final approach?
I have set the function for the servo 4 (rudder) to 26 - ground steering. Is this correct or should I use the function 21 - Rudder?
The version of ArduPlane is 3.8.5 I forgot to write this at first.
The preflight- and calibrationduring the flight were sucsessfully done.
During the takeoff and flight everything perfect. Only during the landing the ground steering makes trouble.
Hi,
I have put some foam suronding the Pixhawk.
Now the air could not flow fast at the Pixhawk and the value of the barometer is accurate.
Many thanks to point me in the right dircetion.
Rgarding the problem with the ground steering. I have increasesed the value for the steer2srv-p paramter close to the double range as discribed in the manual.
The behavoir is no much better.