We followed the wiki instructions to align our helicopter’s blade angle. However, during our test flight, the helicopter flew backward. Despite trying to pitch the nose down, it didn’t respond very well. When we lowered the throttle, it was easier to pitch the nose down, but then we lost altitude. Clearly, we have issues with the cyclic settings and most likely with the trim setting. What is the best approach to adjusting the cyclic pitch?
Hi @Taha_Atas
looking through your log I would suggest to do the following:
1)Make sure your accelerometers are correctly calibrated. Eventually re-calibrate your accelerometers using bubble level tool;
2) Level your swashplate using the proper tool (just in case you did not do previously- set H_SV_MAN to 1 before performing this task);
3) Go through the recommended tuning procedure - all parameters are at default right now, so you can’t expect it to fly precisely.
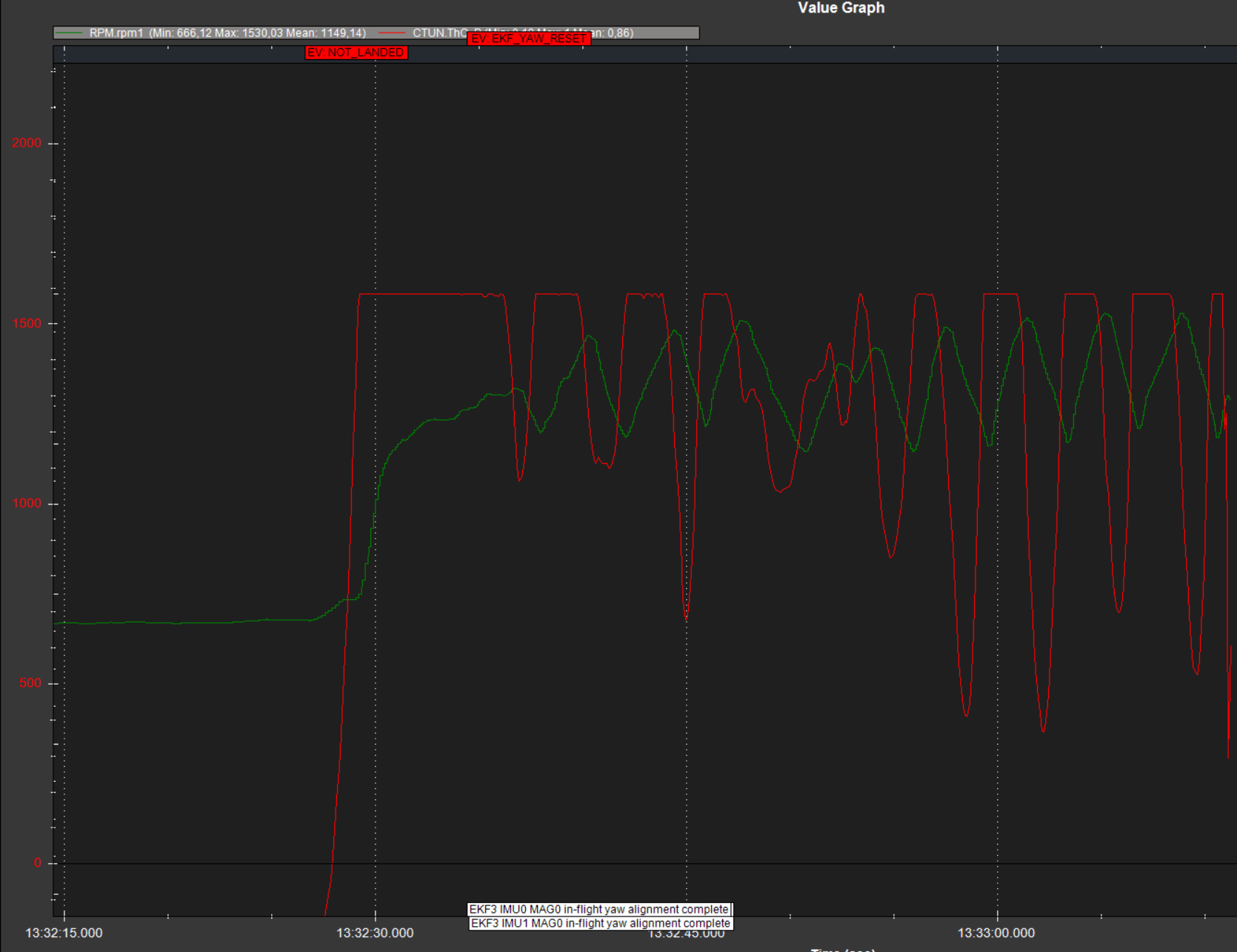
Thank you for your reply. I believe that the collective being maxed out relates to our takeoff issue. We wait for the RPM to reach a certain value according to the runup parameter, but it does not go over 700 RPM even though we waited for 3 minutes. The RPM variations occur during the flight itself. I will share the flight video at the end.
I have a few other questions. We checked our blade angles when the collective and pitch were maxed out. One blade was at 16 degrees, while the other was around 6 degrees. We set our throttle curve maximum to around 80%, and the helicopter took off at about 70% throttle. We are using an OS55 Max engine, and the helicopter has 600mm blades.
We are building helicopter as a team in university so we are open to any kind of help.
@Taha_Atas that is scary! please try and do little steps at a time, especially if you are new to the system.
Do you mean you set throttle curve in your remote control? Remote control must not have any pre-programmed mixing in it (like swashplate mixings or throttle/collective curves).
Throttle curve parameters in your setup are at default values.
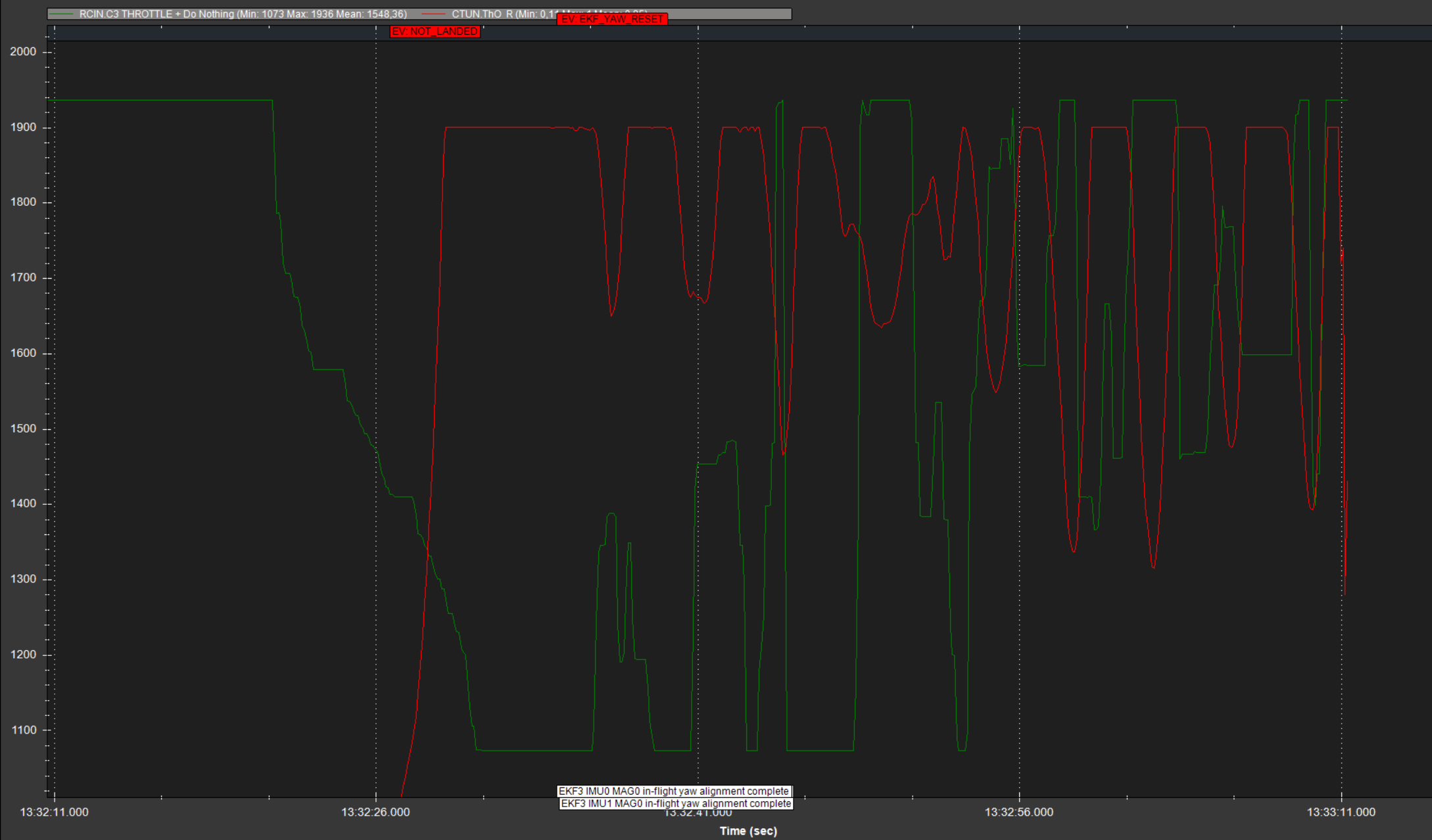
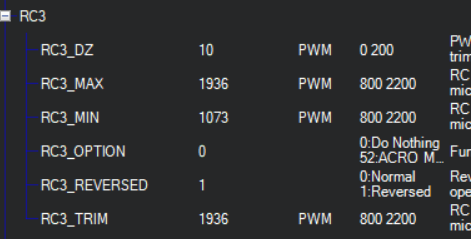
Also, your collective is reversed:
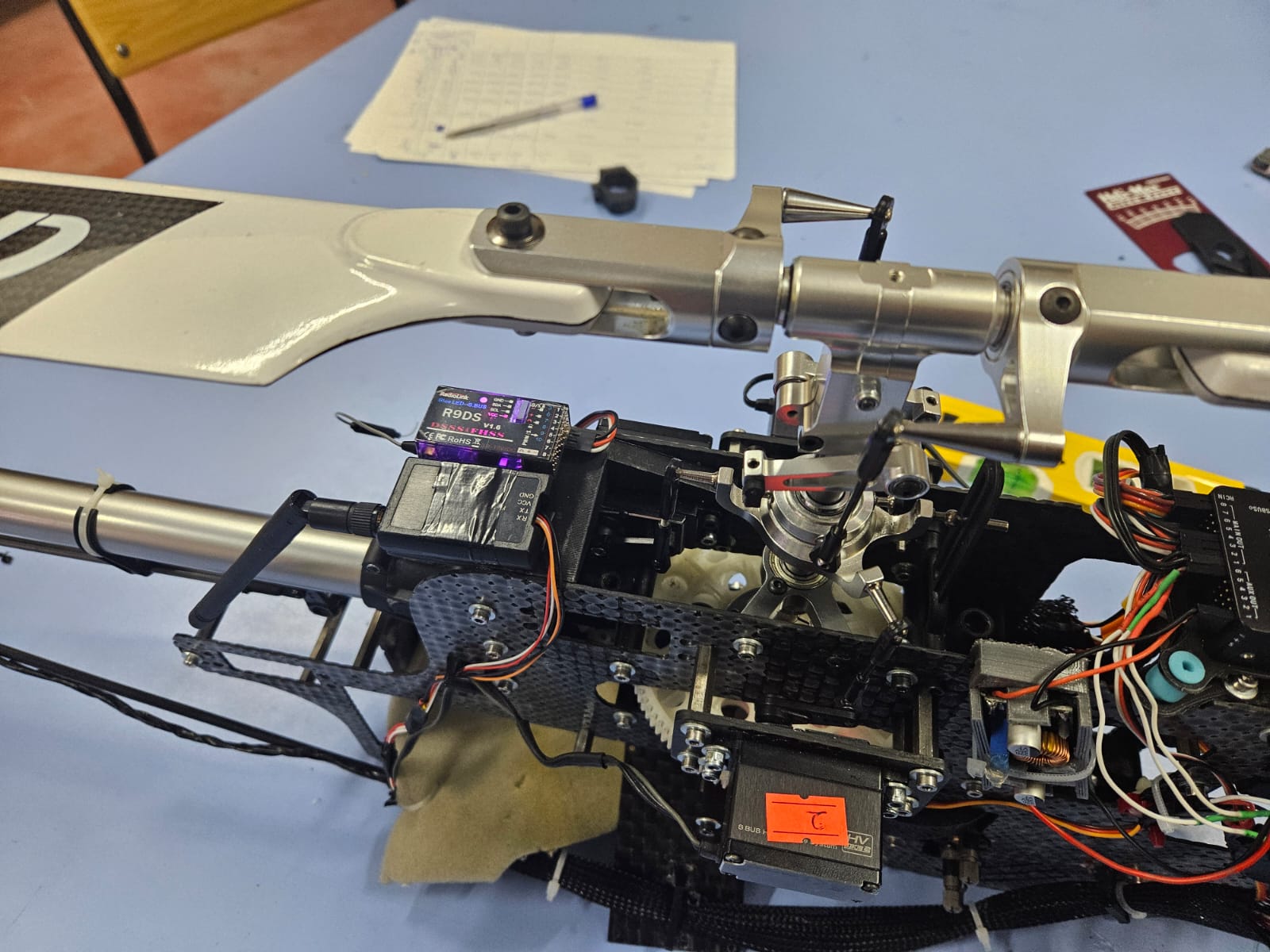
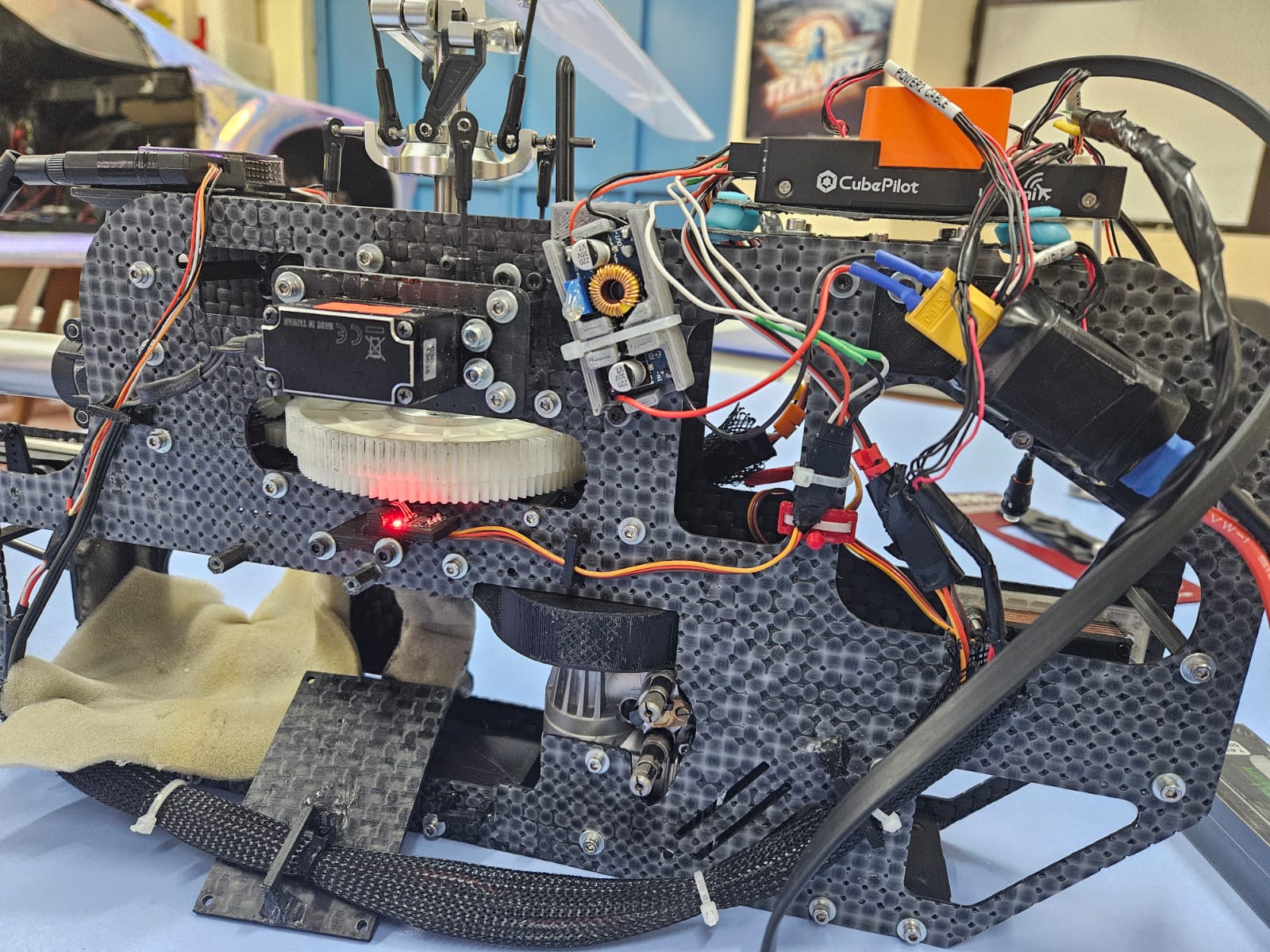
The last time I saw something like this was when I put servos that did not have enough torque to control the swashplate. Are you sure that your servos have enough torque to control a flybarless rotorhead. Do not buy cheap servos for the swashplate.
I meant we left default throttle curve. We did not change anything about throttle curve on our remote. I have no idea why throttle is reversed. We did not reversed the throttle. What do you think about the angle 16 when collective and pitch is maxed?
that is a bit tight for a 600 class, it’s a servo meant for tail rotor actuation not swashplate (high speed less torque). For a machine of that size aim at getting at least a 10kg/cm torque and 0.1s/60deg speed
Now we see that even though we level our swashplate and measure the angles everywhere, when the pitch is maxed, one of the blades reaches around 7 degrees (as we adjusted), but the same blade gets a different angle when turned 180 degrees. We wonder if that effect anything or what could it be about?
And we still have no idea how to minimize our cyclic angles when both pitch and collective is maxed. We still get around 17 degrees and that, as we know, is too much.
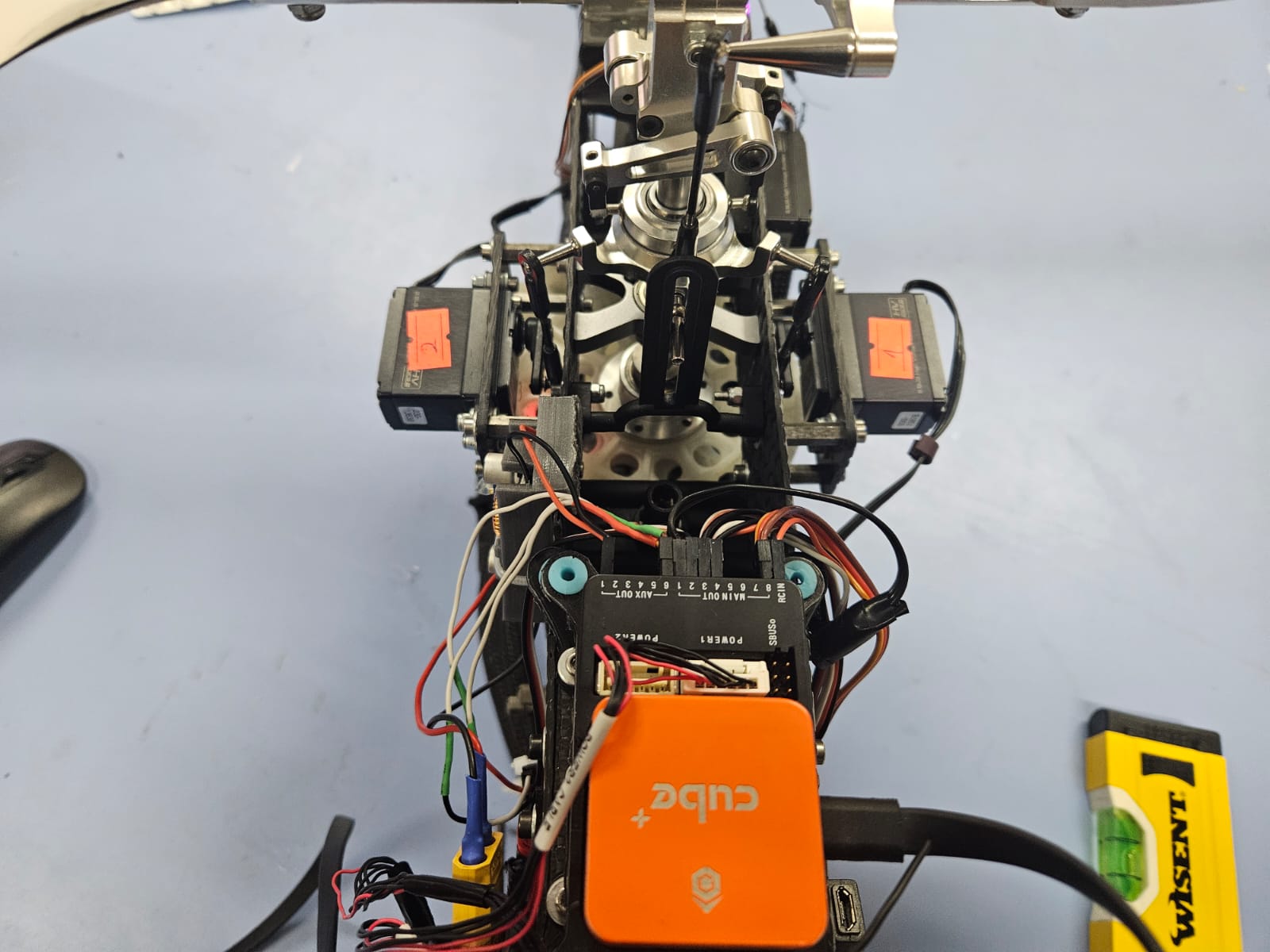
It is not fully built by ourselves. It is a prototype so we bought most of the component like pixhawk, swashplate and transmission system. But we located the servos. But I don’t think it is hardware problem since we are using pixhawk cube orange. In our opinion it could be about where the servos are located or parameters.
I’m not suggesting you need to do acrobatics, but at least one of your team members should know how to hover an rc heli with some confidence. I suggest everyone in your team play with the RC heli simulator in their free time. I recommend “Hover Here”, it’s free and very well made.
looking at your photos, I see those swashplate ball link arms have extensions.
which means the servo horns has to move more, and be longer.
otherwise the servo will reach it’s limit and can move no more.