Hello everyone .
I want to report an issue we are experiencing with the use of Copter-4.3.
In order not to repeat myself during this post , I am giving you the link of the issue I created ( this has been added to the official issue list of Copter-4.3 by @rmackay9 :
To update it to date, the problem is also present in the official Copter-4.3.1.
The Issue:######################
The problem occurs on a luminousbee5 drone , which has vanilla Ardupilot Copter-4.3 firmware on it , but not with vanilla Ardupilot Copter-4.2.3 firmware.
When using the led subsystem via a lua script(lua_led_testing.zip),(or with other systems) , to turn on a number of leds, equal to or greater, than 44 , the entire drone stops working , thus preventing connection to it via USB or UDP with Mission Planner .
As you can see from the screen below , the whole system seems to freeze or go into error , after printing the debug message from the lua script : LEDs started , and after turning on the LEDs.
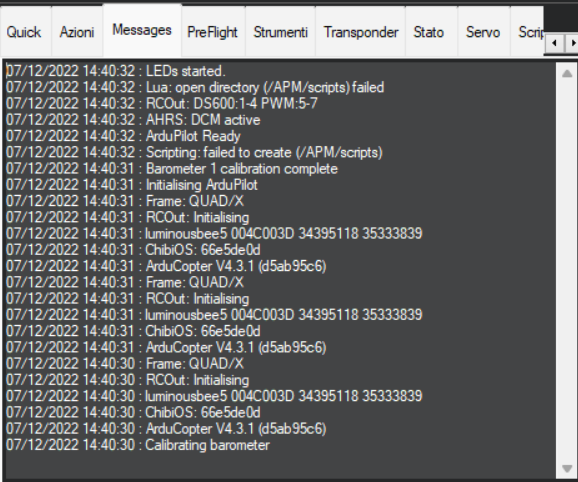
I want to specify that the lua script used for this test has already been tested and is working with Copter 4.2.3.
The possible problem and the partial solution found : ######################
By researching various parameters in Ardupilot we realized , that by varying a particular parameter the problem is triggered .
The parameter is SCHED_LOOP_RATE , if this parameter is set to 800 , the problem I described above occurs . HOWEVER , if you set this parameter to 400 , the problem disappears and the drone starts up normally.And we can connect to the drone without any problem , from Mission Planner via usb.
Also with the SCHED_LOOP_RATE parameter set to 400 , every combination with the SERVO_DSHOT_RATE parameter do not create the problem described.
By setting the parameter SCHED_LOOP_RATE to 800 , every combination with the parameter SERVO_DSHOT_RATE create the described problem.
With Copter-4.2.3, on the other hand, there was never any problem even keeping the parameter to SCHED_LOOP_RATE set to 800.
The tests done with the various frequencies:######################
We then did various tests of combinations between the parameter SCHED_LOOP_RATE and SERVO_DSHOT_RATE and these are the results :
LOOP_RATE |DSHOT_RATE |RESULT
400------------- 400--------------- WORKING BUT ONLY 41 LED TURN ON
400------------- 800--------------- WORKING BUT ONLY 41 LED TURN ON
400------------- 1600------------- WORKING BUT ONLY 20 LED TURN ON
400------------- 1000------------- WORKING BUT ONLY 32 LED TURN ON
800------------- 800--------------- DON’T WORK(CRASH)
800------------- 1000------------- DON’T WORK(CRASH)
400------------- 1600------------- DON’T WORK(CRASH)
#########################################################################
So I ask the main developers of ardupilot to investigate about this problem to arrive at a solution .
Thanks to all ![]()