I observed such a problem when connecting power 4 times on different autopilots. Firmware installed everywhere 3.6.11 (hexacopter) Autopilots everywhere Pixhawk mRo. After restarting the autopilot, the problem disappears. Can it happen again in flight. Because I have already crashed two hexacopters. Interestingly, everything was good before. Only the weather has changed - now it’s 0, -5 degrees outside and the firmware. Later I will try to attach the logs.
Thanks. @hosein_gh What could be the problems with the GPS module? The module Drotek XL is on a quadrocopter. What could be the noise on the compass? In what program did you build this chart? I haven’t seen one before. What is noteworthy before this was not when it is warm. Maybe it’s cold. Just in this configuration, I flew off for more than six months. Everything that changed in the last week is the firmware and the weather, it got colder.
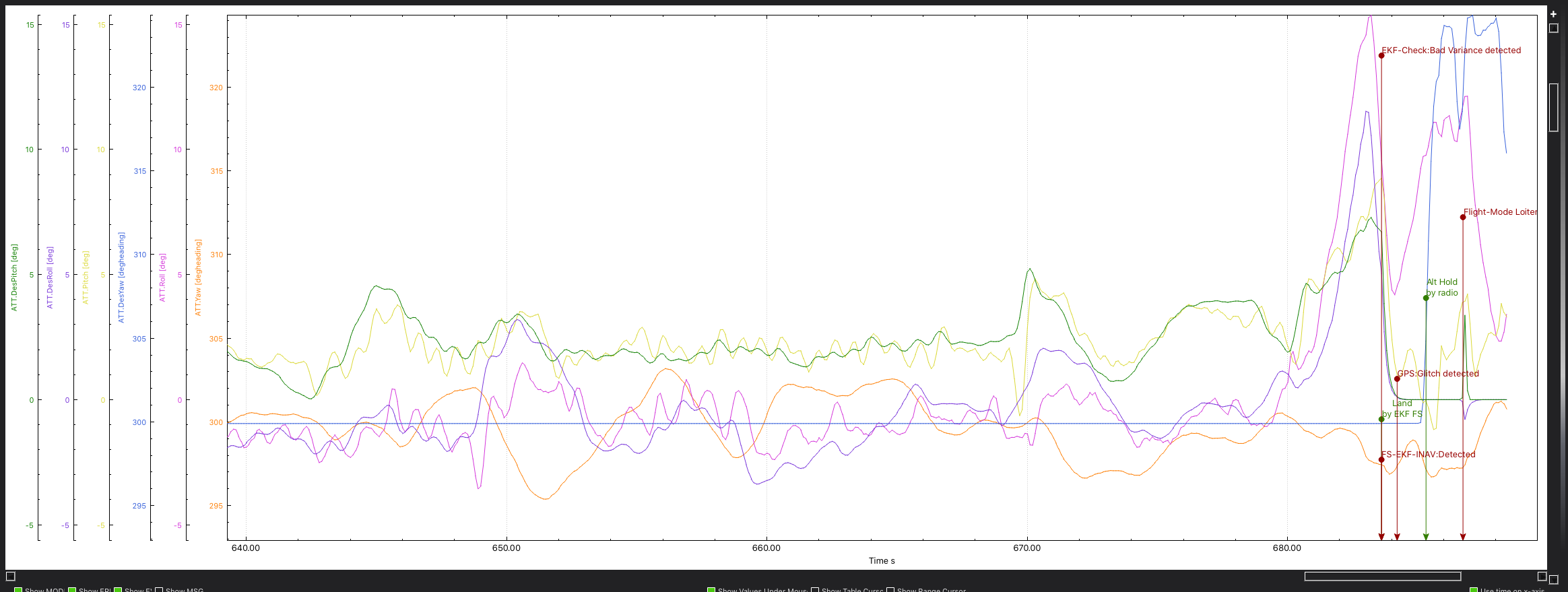
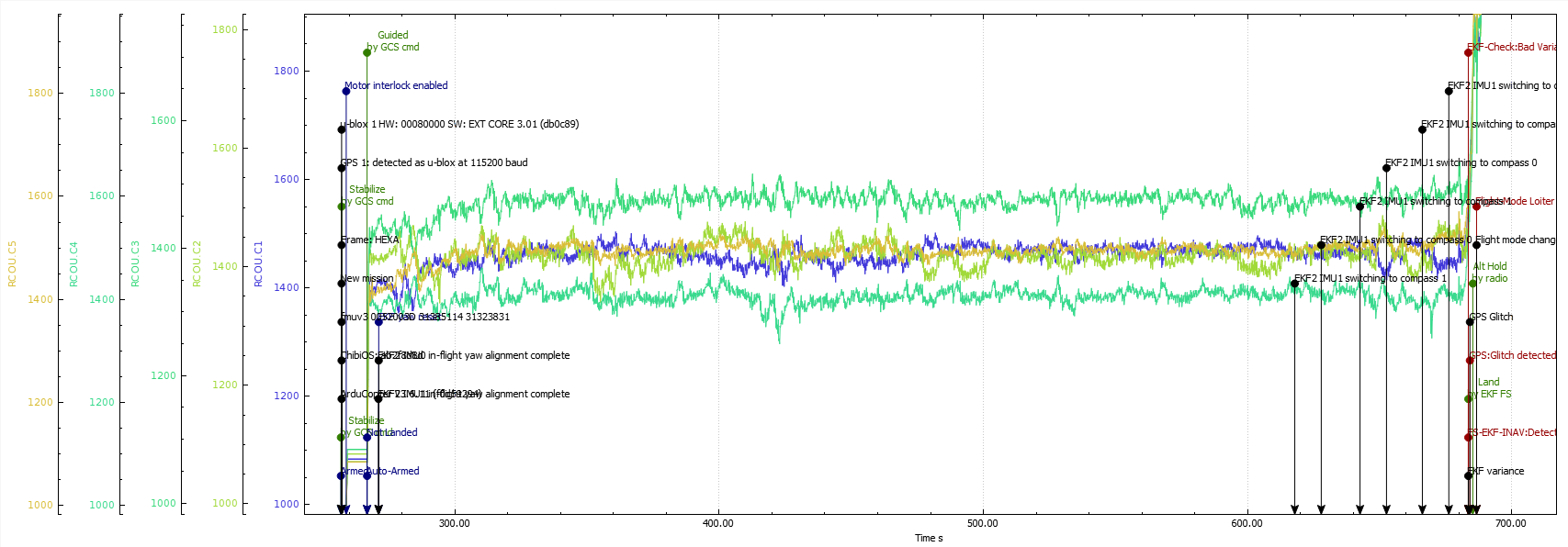
The most important question is why did this happen? For some reason, the testimonies of two IMU (IMU1, IMU2) diverge at this moment:thinking:
It’s more surprising your copter stayed in the air as long as it did.
But as your running 12S I would assume that it is a large copter and you are flying it with default PID’s.
here is the FC trying to hang onto the copter until it just couldn’t anymore.
its possible that your compass/gps cable is near high ampere wires or something like 1W (or more) telemetry or transmitter
i used APMplanner to make this chart
as @mboland said you are flying with default PID’s and it could be the main reason
noise on compass and GPS cloud be a another reason
also your copter is not physically balanced or motor 3 or 4 is twisted and its make hard for FC to keep stability of copter when its faced a failure
Here is another log. Are these two cases related? It confuses me that IMU1 and IMU2 go in different directions before the fall. Could it be that he just did not know which IMU to believe and could not filter it out?
i don’t think its actually firmware bug i flied many times with 3.6.11 with different copter size.
there is message in mission planner about bad gyro health
try to re-calibrate gyro/accel/compass and finish all steps in this link then run autotune it might solve your problem
also protect your GPS/compass cable
 Interestingly, everything was good before. Only the weather has changed - now it’s 0, -5 degrees outside and the firmware. Later I will try to attach the logs.
Interestingly, everything was good before. Only the weather has changed - now it’s 0, -5 degrees outside and the firmware. Later I will try to attach the logs.