Thanks for the tip. I’m going to try that.
Felix in 4.0, or any of the ArduHeli builds that were done, you can get rid of rolling over danger by using the new “virtual bar” acro mode. With the BAL’s set properly it provides a similar “feel” to a real helicopter on the cyclic and the pilot has control of it. The attitude controller can completely whack out and the pilot still won’t lose control of the machine and have it roll over.
It was probably one of the more popular “features” introduced for helicopters.
Yes, I guess I have already activated that. It’s just setting the ACRO_BAL_ROLL/PITCH parameters greater than zero, right?
Acro trainer mode needs to be disabled as well. Probably best to start with the BAL Params at 1 and increase until you get the feel you like. Be aware that values of 3 will result in basically stick to Swash. So creep up on it.
Zero will give you “rotate and hold” like old acro was. Most people don’t like that. I see Bill already responded. Yeah, 3 will give direct stick to swash pretty much. Most people like it somewhere in between.
The nice thing is, it’s adjustable so you can have different “feel” on pitch vs roll. Personally I like a little more stick to swash on roll, a little less on pitch. So I use 2.5 on roll, 2.0 on pitch. That way, for cruise in acro it “grabs” the attitude quicker and holds a nice cruise attitude of a couple or three degrees nose-down with the cyclic centered. With a nice crisp response to the cyclic on roll, with just enough attitude holding to reject disturbance from wind. It is pretty cool, actually.
Actually I like “rotate and hold” because I’m used to it from aerobatic flying. Try flying a nice turn with a helicopter that is not holding its attitude… But since I’m using my ardupilot heli more in a UAV type of style that might be a useful feature. Currently I have set it (both pitch and roll) to 1. More would feel too much for my personal taste. But I’m also using “Stabilize” for hovering and landing. Have you activated the limiting feature?
We have gone away from using Stabilize as an attitude error causes the pilot to have to fight the helicopter to fly it or keep it upright.
The reason I don’t like the “rotate and hold” is because that’s not how real helicopters work. Consider a parallel slope takeoff procedure, for instance. The helicopter’s engine is started and rotor run up with cyclic neutral. Stabilize is a bad idea here because it instantly tries to lean the helicopter into hill.
Once the helicopter’s rotor is up to speed you hold constant cyclic into the hill to raise the lower skid off the ground. With “rotate and hold” this results a bunch of bump it, center it, bump it, center it to see what happens. It’s not smooth, or natural.
With stick-to-swash it’s natural. Hold the uphill cyclic and pull that lower skid off then center it. Raise the collective to lift up smoothly into hover. This is important. In the areas we fly from there is no such thing as a level place to take off from usually. It might be a field drive with 10 degrees slope from the public road into the field. And that’s what we have to work with - we have an area, directly under powerlines (usually) that’s about 6 feet square and 10 degree slope. That’s where we have to take off from and land.
What is the limiting feature?
@Felix @bnsgeyer Thank you for your help. My drone crashed some time ago. There may be some structural problems. I plan to make another one. I will try to adjust it and report the effect of my adjustment later.
Hello Chris, how can I switch to the “new virtual bar acro mode” - or is it now normal in “acro”?
And: doing the tuning (PID’s) in acro or in stabilize?
Holger
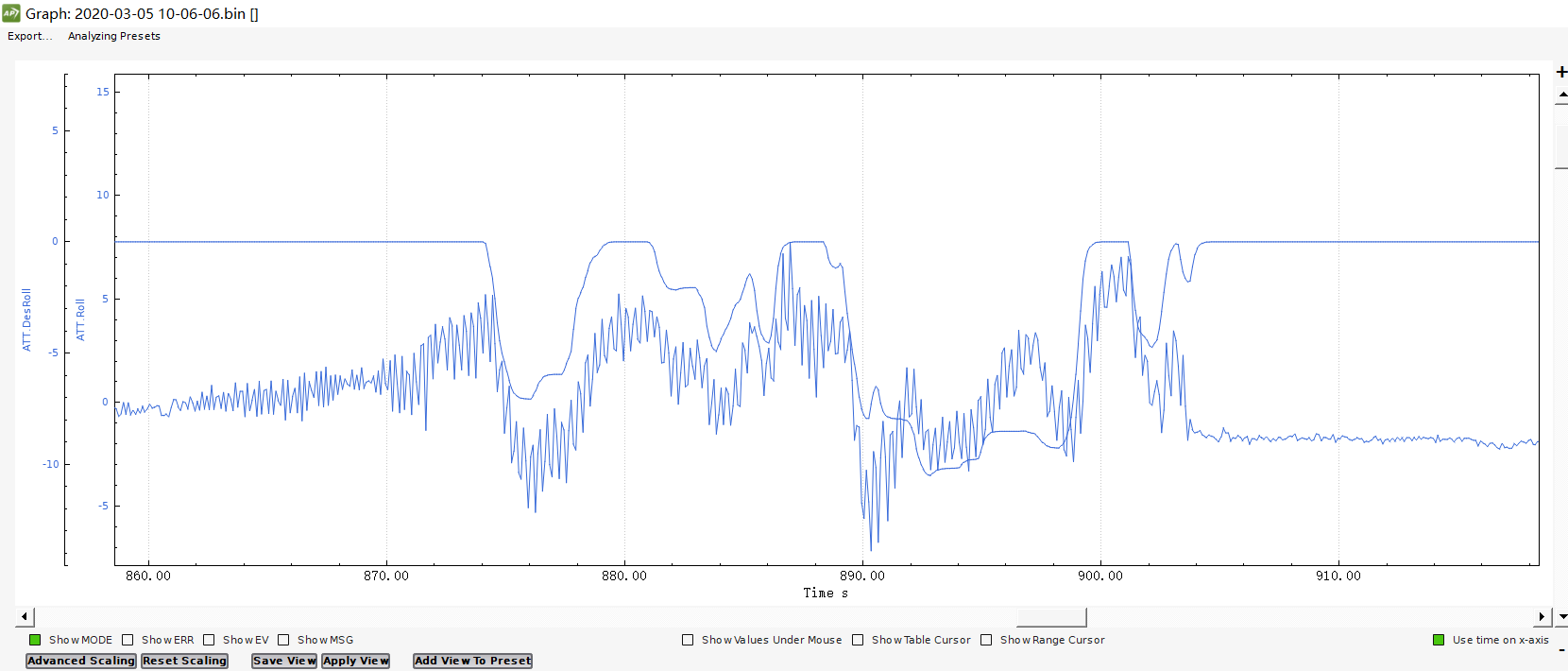
But with the new acro-trainer mode, the helicopter is also trying to level out, so you would also have to fight it in case of an attitude error, right? Especially if the “limiting feature” is active. With that I meant ACRO_TRAINER set to 2 which is “Leveling and Limited”. It think that means the lean angle is limited to the stabilize limit? By the way: I searched for that parameter and just found ANGLE_MAX. There it says “Maximum lean angle in all flight modes” That can’t be true. I’ve set that to the default of 4500, but I know, that I have flown bank angles way greater than 45 degrees in acro. I just confirmed that with my logs. I also had ACRO_TRAINER set to 2.
I’m really sorry to hear that! Recently? The helicopter we saw the logs from?
Oh, I just realized, that the leveling out of the helicopter isn’t coming from the new acro feature. I was a bit confused, because for the BAL-parameters it says “rate at which roll/pitch angle returns to level”. But that isn’t applicable to helicopters, right? It’s leveling out because of ACRO_TRAINER set to 2? That’s why I said, I didn’t want to turn the feature up further. I didn’t want the helicopter to level out so fast.
That’s correct. But the virtual flybar does not work with that turned on.
On that, I am not sure. In 4.0 that might have been fixed. In 3.6 when we worked on the virtual flybar mode if I remember right it would allow up to 90 degrees with leveling and limited in acro.
Then you are not using the virtual flybar. The virtual flybar is default for helicopters and it only works if the trainer option is set to zero. Then the BAL settings determine how fast the desired attitude from the stick input decays back to the actual attitude. It simulates the action of a flybar. Except it is adjustable without having to change flybar paddles or weights.
@picoflug it is default for heli if the acro trainer is turned off. Then the acro BAL settings will set how you want it to work. At BAL of 3 it will be pretty much direct stick to swash response. for BAL of 0 it will be like many FBL units without “virtual bar” - move the stick, the frame rotates to that attitude and holds. If you want the natural flybar “feel” then set the BAL’s someplace in between.
Always do PID tuning in Stabilize, not acro.
Thank You, i wiil try it!
Then I have to correct my statement and I have never tried it. Sorry for that. I just changed it and I’m excited to try the new feature.
Yes, I was flying with 3.6.8, so that’s a good explanation.
hello friends,
now the tandem is nearly flying good.
But now a problem with teh compass. meanwhile i have 3 miniPIX, one in single, two in each of the tandems. on all i have 4.0.3.
in the single the position is “yaw 180”. calibration no problem, POSHOLD very good.
In the tandems I have the compass position “none” (= in flight direction).
after calibration it shows the right direction on the map, but it changed the Position automaticly to “yaw270”. And i have heavy toilet-bowling in POSHOLD.
I switched back to “none” and calibratet new a few times - the same: it switches again to “270”.
I tried it with 4.0.2 - the same.
What can that be?
Hello Holger,
have you set it as an external compass? For COMPASS_ORIENT it says “This value will be ignored unless this compass is set as an external compass.”
Also try unchecking “Automatically learn offsets”
Hello Felix,
every compass/GPS from the 3 PIX is used as external. The problem / phaenomen is new and only at 2 ones, the 3. is working ok.
“automatically learn offsets” is always “off”, when I switch it on, on the next start it ist “off” again.
After installing Firmware it is all times at “none” - how I switched. But now (new) after calibration and rebooting both PIX with “none” they switches to “270”. In the map the direktion is correct than, but it has the toilet-bowling.
how can that happen?
Hallo Holger,
verstehe ich das richtig, dass Du den Haken bei „Externally mounted“ gesetzt hast? Und wichtig ist natürlich auch, dass es nur beim Richtigen gesetzt ist. Die anderen beiden Kompasse sind ja intern und dürfen den Haken nicht haben. Kennst Du die Funktion zum Live-Plotten von Daten in MP? Damit kannst Du herausfinden, welcher Kompass welche Nummer hat. Ansonsten fällt mir leider auch nichts ein, woran das liegen könnte.
Hallo Felix,
ich verstehe es auch nicht. Ich habe bei allen drei nur den externen Kompass im GPS aktiv und die Häkchen entsprechend bei allen gleich gesetzt.
Beim single funktioniert das ja auch prächtig, wobei ich bei dem einbaubedingt “yaw180” habe.
Bei den beiden anderen ja auf “none”.
Ich werde nochmal rumprobieren. Beim tandem ging es zuerst ja auch, da war aber noch 3.6 drauf.
Ich habe ja wieder ein bisschen die 4.0 in Verdacht …
Andere Frage zu MP: Wenn ich mit dem Laptop außerhalb “meines” W-Lan bin, kann ich die Karte nicht richtig vergrößern (reinzoomen) - sie wird dann sehr pixelig. Kann man die Karte irgendwie vorher entsprechend speichern?
Viele Grüße Holger
Gruß Holger