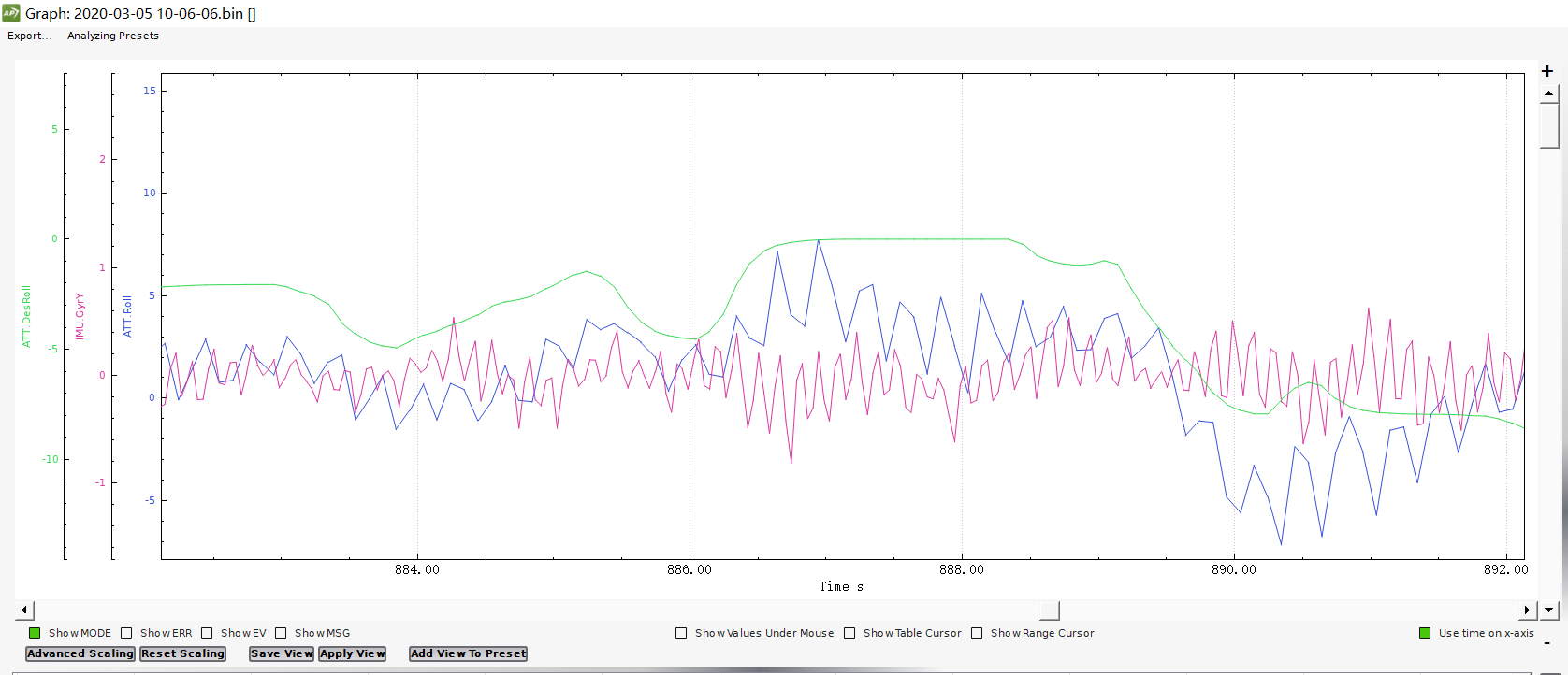
I showed the Y-axis data of the IMU and found that the frequency of the sawtooth wave superimposed on ATT.ROLL is the same as the frequency of the Y-axis of the IMU. Does it mean that it is caused by the vibration of the IMU?Is this normal?
Hallo Holger,
ich habe gerade in der Anleitung gesehen, dass ab 4.0 die Kompass-Einbaurichtung von selber ermittelt wird:
https://ardupilot.org/copter/docs/common-compass-setup-advanced.html#common-compass-setup-advanced
Das scheint bei Dir wohl nicht richtig zu funktionieren. Für interne Kompasse hängt das mit der Board-Einbaurichtung zusammen (AHRS_ORIENTATION). Ist die bei Dir korrekt eingestellt? Vielleicht hängt es auch damit zusammen, dass Du einfach alle Kompasse als „Externally mounted“ definiert hast. Wie immer empfehle ich erstmal das Setup sauber zu machen. Dann kommen wir sicher Deinem Problem auf die Spur. Du müsstest also erstmal herausfinden, welches Deine internen und welches Dein externer Kompass ist. Probier das mal über die Tuninganzeige:
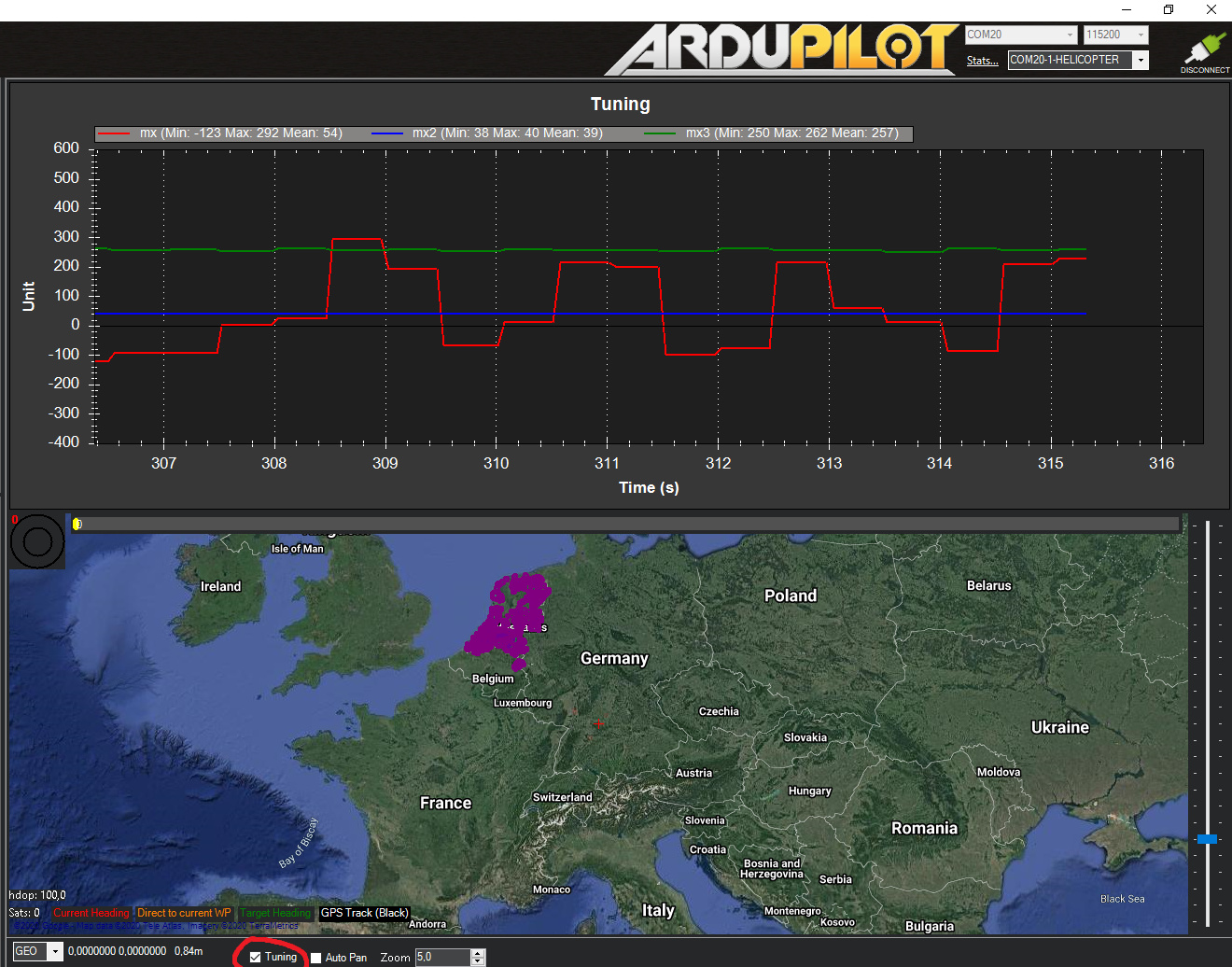
Wenn Du jetzt den externen Kompass drehst und das Board unbewegt lässt, siehst Du, welcher ausschlägt. In meinem Fall war das jetzt Kompass 1. Dann setz mal die Häkchen richtig und probier das mit dem Kalibrieren nochmal. Ich würde außerdem empfehlen, auch die internen Kompasse zu nutzen. Das sollte Dein Endergebnis genauer machen.
Zu Deiner zweiten Frage:
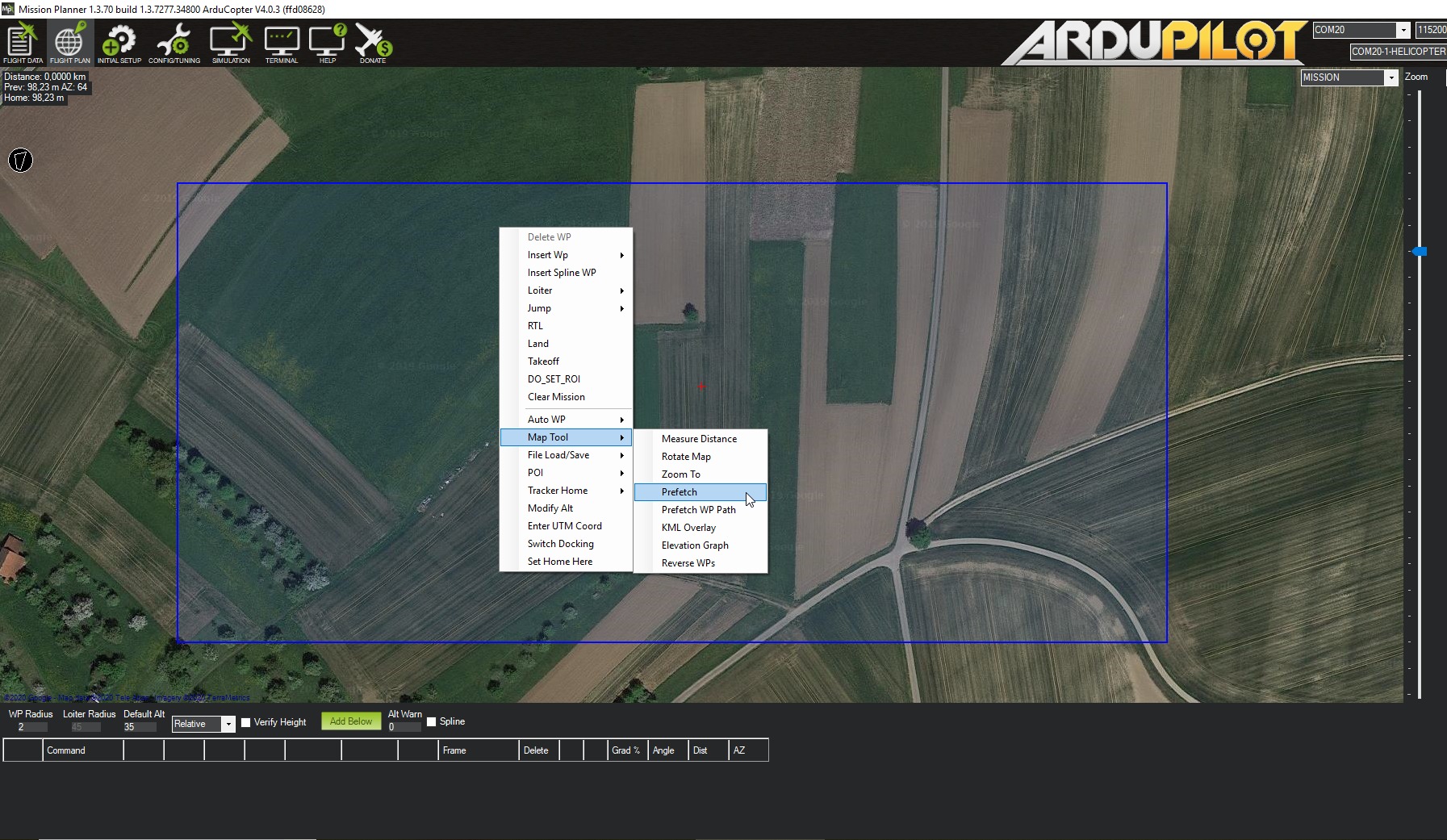
Wenn Du die Karte im Voraus herunterladen willst, einfach auf den Reiter „Flightplan“ gehen, auf der Karte mit gedrückter ALT-Taste Deinen Bereich aufziehen, Rechtsklick, „Map Tool“, „Prefetch“. Ein Zoomfaktor von 19 oder 20 reicht normalerweise vollkommen aus.
@moluav: It looks like your aircraft is oscillating around the roll axis in flight. I’m pretty sure that is a problem with the PID tuning. Try reducing the PID values a little bit. I’d start with the P value. What you showed in your second picture is the gyroscopic sensor of the IMU. It’s measuring rotations. Not accelerations. So it’s not surprising it shows a reaction in about the same frequency range as your aircraft oscillations. But if I remember that correctly, GyrY is the rotation around the pitch axis. So you would have to plot GyrX to see the direct correlation to your roll oscillations.
So just try improving your tuning. I’m pretty confident, that this will solve your problem.
hallo Felix, danke für den Karten-Tip.
Ich habe in allen dreien lediglich den externen Kompass (Compass 1) aktiviert, mit den entsprechenden Häkchen. die Controller haben die richtige Orientierung.
Ich habe es vorhin nochmal im Garten probiert. habe den Kompass um 180 Grad verdreht und im Kompass-Menue entsprechend “yaw180” eingegeben.
Nach dem Kalibrieren zeigte er jetzt “yaw90” an (vorher ja 270), die Darstellung auf der Karte war aber auch wieder richtig.
und wie gesagt, beim Single-Heli geht es ja allerbest.
Ich habe beim Tandem jetzt noch mal 3.6 reingenommen. da geht es wieder richtig. will damit noch mal fliegen.
das mit dem 2. (internen) Kompass kann ich ja später auch noch mal probieren.
Viele Grüße Holger
Hallo Holger,
also es kann natürlich sein, dass die Einbaurichtung in Deinem GPS nicht mit dem aufgedruckten Pfeil übereinstimmt. Bei manchen GPS-Modulen ist das soweit ich weiß tatsächlich der Fall. Das würde natürlich erklären, warum das Offset immer auf einen anderen Wert springt. Solange die Darstellung auf der Karte exakt stimmt, funktioniert aber auch alles richtig. Dann kann Dein Toilet-Bowling nicht vom Kompass kommen.
Das mit dem internen Kompass würde ich trotzdem noch probieren. Es kann ja auch nicht schaden, noch eine Redundanz zu haben…
Viele Grüße
Felix
Hallo Felix,
wäre eine Erklärung. Allerings nicht dafür, dass es in 3.6 wie vorgesehen klappt.
War eben noch mal los (tandem mit 3.6). alles gut, kein bowling.
Werde an den PIXen untereinander mal die Kompasse tauschen und sehen, was passiert.
Wenn nicht die Kreiseleinstellungen, was könnte dann noch zum Bowling führen?
Viele Grüße Holger
Hallo Holger,
solange die Anzeige auf der Karte richtig ist, würde ich einfach mal davon ausgehen, dass es funktioniert. Seltsam ist es natürlich schon. Ich würde auch nochmal mit den internen Kompassen experimentieren (beispielsweise gar kein externes Modul anschließen) und schauen, ob es dann immernoch Unterschiede zwischen 3.6 und 4.0 gibt.
Das ist auf jeden Fall auch eine gute Idee. Vielleicht sind die Module ja doch unterschiedlich.
Schlechtes Tuning z.B. Welchen der Helis hast Du denn jetzt schon getuned? Vielleicht auch GPS-Empfang mit zu schlechter Qualität… Aber Verdächtiger Nr. 1 wäre natürlich schon der Kompass.
Hallo Felix,
habe mal die Kompasse vom Single und dem einen tandem ausgetauscht. Gleiches Ergebnis.
Der Single nimmt die vorgegebne richtige einbauposition von 180 wie vorher an und zeigt auch genau auf der Karte.
Beim tandem kommt es wieder zu dieser Abweichung, musste sie diesmal sogar “per Hand” auf 90 bzw. 270 stellen, damit die Anzeige richtig ist. Aber Kalibrierung immer erfolgreich.
Bin allerdings noch nicht wieder geflogen.
Sollte ein Fehler im PIX sein (dann ja sogar in zweien), kann man den irgendwie wieder “jungfräulich” machen, oder geht nur Aufspielen anderer FW?
Internen Kompass werde ich nochmal probieren.
Viele Grüße Holger
Hallo Holger,
das ist ja erstaunlich. Laufen beide Helis denn mit der gleichen Firmware? Und mit dem gleichen Controller? Dass beide FCs in den Tandemhelis hardwaremäßig defekt sind, halte ich für sehr, sehr unwahrscheinlich. Ich denke, es liegt eher an irgendeinem Parameter, den Du anders eingestellt hast. Die könntest Du ja auch einfach mal vergleichen. Kennst Du die Funktion in MP? In der Full Parameter List einfach im rechten Bereich auf „Compare Params“ klicken und das entsprechende File auswählen. Oder schick mir einfach Deine beiden Parameter-Files, dann schaue ich mir das mal an.
Klar geht das. Außer der Firmware sind es ja nur die Parameter, die Du geändert haben könntest. Z.B. könntest Du mal die Parameter vom funktionierenden Heli auf den Heli mit dem Problem spielen und schauen, ob das Problem noch besteht. Oder Du kannst mal „Reset o Default“ ausprobieren. Deine Parameterdatei solltest Du vorher natürlich sichern, damit Du die Parameter, die Du absichtlich geändert hast nicht wieder verlierst.
Viele Grüße
Felix
Hallo Felix,
“compare” kenne ich, kann ich noch mal machen, und “reset” versuche ich auch noch mal.
Komme ich aber erst morgen zu. kann dann auch ggf. die Para-files zusenden.
Gruß Holger
Hi
Would be nice if you could keep the discussions in English, otherwise most of the users are obligated to use Google Translate to get some valuable community knowledge.
Vielen Dank 
@LuisVale I asked Felix to help Holger and write in their native language. Holger was not able to understand English very well.
Guess we’ll have to ask Jani to add a translate button on the toolbar
@LuisVale Hm yes, I see the problem. But most of the time we’re just trying to figure out where the strange behavior of some components or the helicopter itself comes from. So that wouldn’t be very useful in English too. I guess a good solution would be to summarize our results in English when we could solve another problem. I can do that for you, if you like.
1 Like
yes, i think, felix is rigtht.
Hallo Felix,
habe auf beiden Tandems auf Grundeinstellungen zurückgesetzt.
Beim großen (mit dem neuesten PIX) geht es gut. nach dem Kalibrieren behält er die Einbaurichtung und zeigt (bei default) auf der Karte die richtige richtung ( bis auf wenige Grad) in allen Richtungen an.
Beim kleinen (erster PIX) behält er die Einbaurichtung jetzt auch. allerdings mit größeren Abweichungen. bei 245 und 65 Grad ist er genau. in den dazwischenliegenden bis zu 20 Grad Abweichung.
Der eingebaute Kompass zeigt nur nach Norden (allerdings genau), die auf 180 gedrehte Einbauposition (AHRS-orientation = 4 = 180) nimmt er nicht an. Nach dem Kalibrieren waren die Ziffern auch nicht grün sondern gelb, und wenn ich ihn allein aktiviere, kommt die “bad compass health” meldung.
habe diverse Kalibrierungsversuche gemacht. Schätze, dass da ein Fehler im PIX ist. Kompass kann es ja nicht sein, den hatte ich ja mit dem im Single getauscht. Und da geht ja alles sehr gut.
werde es aber auch nochmal wieder mit der 3.6 versuchen, vielleicht tut er es da ohne Fehler.
Viele Grüße Holger
Hallo Holger,
ich habe das jetzt mal genauso getestet wie Du und komme tatsächlich auf das gleiche Ergebnis. Bei mir springt der Kompass auf Yaw270, obwohl die Pfeile auf dem Pixhawk und Kompass in die selbe Richtung zeigen. Irgendwas scheint da tatsächlich nicht zu stimmen. Ich habe das auch mit der 4.0.3 getestet. Hast Du mal die 3.6 versucht? Wenn das Problem da nicht besteht, muss es ja eindeutig im Code liegen. Ich habe das Problem gerade auch nochmal in einem neuen Thread gepostet. Vielleicht hat jemand anderes das auch schon bemerkt.
Viele Grüße
Felix
hallo Felix, danke, also liege ich nicht ganz falsch. Ich bin allerdings noch nicht wieder geflogen.
habe nach mehreren Kalibrierungen mit allen drei Systemen auch unterschiedliche Ergenisse (immer mit dem externen, den internen schalte ich weg). Und alle in 4.0.3, 3.6 habe ich erstmal wieder rausgenommen.
der Single hat rundrum rund 5 Grad Abweichung, fliegt aber perfek in allen modes.
Der kleine tandem (1. Pix) ist in Ost/West -Richtung ziemlich genau, in nord/süd hat er 10 - 15 Grad Abweichung, aber noch nicht wieder geflogen.
Als ich den zu Anfang (war ja der erste) noch mit 3.6 probiert habe, hatte er auch Abweichungen, ist aber POSHOLD und RTL gut geflogen.
der große tandem (3. Pix) hat rundrum auch rund 5 Grad Abweichung, ist aber noch garnicht geflogen.
warte dringend auf brauchbares Wetter.
Vielleicht kommt ja im neuen thread etwas raus.
Viele Grüße Holger
Hallo Felix,
Erfolgsmeldung! bin den großen tandem jetzt geflogen. er fliegt sehr gut und macht auch Poshold, RTL usw. auch bei stärkerem Wind sehr gut.
Insofern vermute ich einen Fehler im PIX mit dem Kompass beim kleinen tandem. werde mir das noch mal genau anschauen.
Aber es geht nun zumindest beim großen Tandem und dem Single, wie es soll.
Allerdings habe ich beim Hochlaufen und längerem Stehen immer noch das Problem der sich verschränkenden Rotorebenen (=Heck-Gier-funktion).
gäbe es einen Parameter, den ich per Mischer im Pitchknüppel erst aktiviere, wenn ich pitch zum Abheben gebe?
Hatte ich bei meinem alten FBL ja auch so geregelt, dass “Heading Hold” erst beim pitchgeben aktiviert wurde.
Viele Grüße Holger
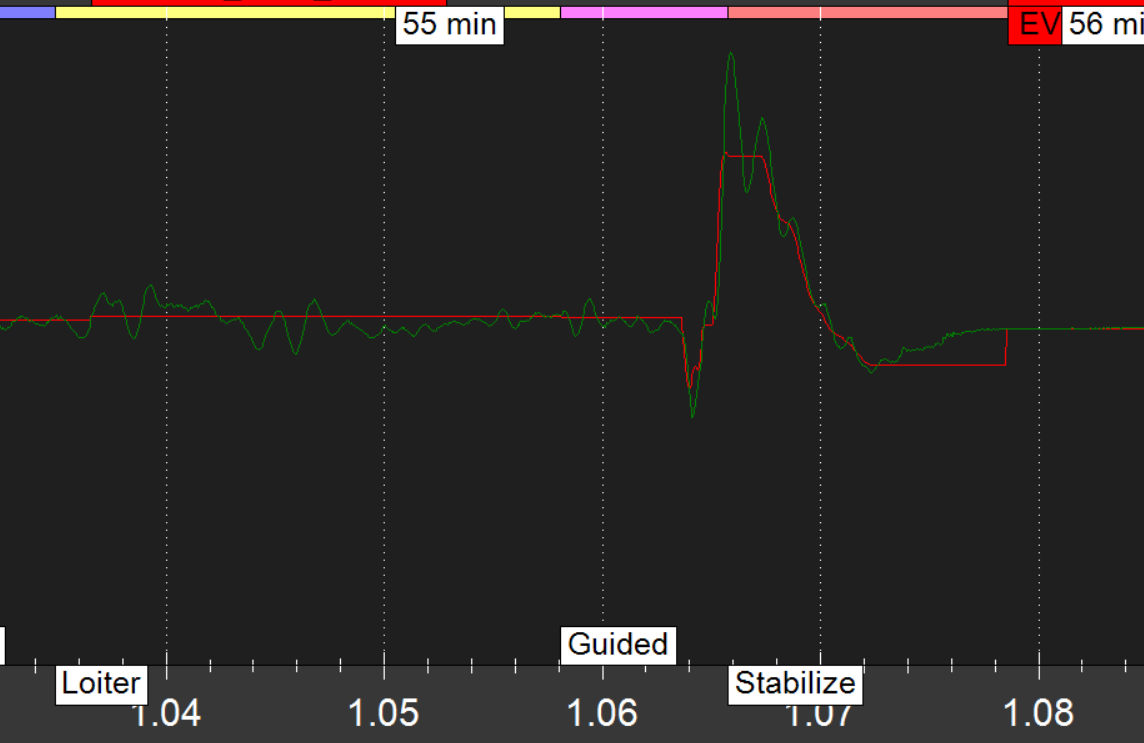
When my chinook is flying in guide mode, the yaw changes suddenly.
From the log, it is expected that the heading output has changed, but the target point I gave is directly in front of my drone. Why is this happening, can someone help to see?
i have upload my log to google drive.There are log records of several flights in the log.
https://drive.google.com/file/d/1AMVvXjGm5bN22VGdC7H1dXTrS5sMhkJM/view?usp=sharing