hallo Felix,
ich kann das mit dem compass gern noch weiterversuchen…
aber den internen habe ich ja erfolgreich calibriert. Er zeigt auf dem Schirm auch die richtige Richtung an. richtung halten geht ja auch prima.
ATC_HOVR_ROL_TRM habe ich heute hinterher auch entdeckt. der steht nicht auf null, weil er vermutlich von einem normalen Heli ausgeht. werde ich mal probieren. Entgegen einem normalen Heli steht meine Zelle gerade, weil es ja keinen seitenschub gibt.
Das mit den schwingungen ist insofern eigenartig, als dass es ja keine nick-schwingungn sind, sondern gleichzeitig vorn und hinten hoch und runter.
Zu anfang war es bei meinen P - versuchen auch so, dass z.B. bei nick nach hinten sie anfingen und bei nick nach vorn aufhörten.
Also glaubst Du auch nicht, dass das baro damit etwas zu tun hat?
ist er bei althold eigentlich im acro oder stabi - modus?
Das loggen musst du mir noch mal erklären, habe ich bislang noch nicht gemacht.
also ich denke, es ist trotzdem gut, einen externen Kompass zu haben. Die internen sind ziemlich vielen Störeinflüssen ausgesetzt. Und wenn Du ihn schon hast, kannst Du ihn ja auch verwenden. Das mit dem Kalibrieren kriegen wir schon hin.
Ach so, ja dann haben wir ja schon die Lösung. Der müsste dann bei Dir wahrscheinlich ziemlich genau null sein. Du hast einen ATC_RAT_RLL_ILMI größer null? Falls ja wird Dein Attitude-Tracking vermutlich nicht das Problem sein.
Ach so? Ich hatte immer Nick-Schwingungen verstanden. Was ist es denn dann? Hüpft der ganze Heli auf und ab? In dem Fall weiß ich, was es ist. Dann wäre es ein zu hoher PSC_ACCZ_P wert. Das wäre sogar sehr wahrscheinlich. Hatte das Problem auch schon. Die Helis sind da recht sensibel im Vergleich zu den Multicoptern.
Das mit dem Loggen geht einfach. Vermutlich hast Du das sogar schon gemacht. Du brauchst nur eine Speicherkarte im Pixhawk (die ist ja meist schon drin) und sobald der Heli gearmed wird, fängt er an, zu loggen. (Wenn Du eine Telemetrie-Verbindung hast, wird das was da ankommt übrigens auch aufgezeichnet.) Auslesen kannst Du die Speicherkarte, indem Du den Heli per USB verbindest und im MissionPlanner im Reiter „DataFlash Logs“ auf „Download DataFlash Log Via Mavlink“ klickst. Du kannst das File dann auch mit MP öffnen und Dir die Graphen anschauen. Das ist eine wirklich tolle Funktion. Es ist erstaunlich, was da alles aufgezeichnet wird und was man daraus über den Flug und das Fluggerät lernen kann…
wenn der ILMI-Wert null ist, kann Dein Problem mit dem Wegdriften aber auch von einem schlechten Attitude-Tracking kommen. Unter 5 m/s Fluggeschwindigkeit ist das Integrator-Leck offen und zieht den I-Wert dann in Deinem Fall auf 0. Du kannst Deinen ILMI-Wert für Nick und Roll mal auf 0.008 stellen. Das sollte problemlos gehen. Wenn Du ihn deutlich höher einstellst, besteht aber die Gefahr, dass Dir der Heli am Boden umkippt.
Das würde ich Dir auf keinen Fall empfehlen. Schon 0,5 ist für uns Helis viel zu hoch. Die Vorgabe kommt von Multicoptern. Weil die keine Pitchverstellung haben, reagieren sie auf vertikale Beschleunigungsanfragen recht träge und brauchen daher einen hohen P-Wert. Aber weil Helis über die Pitchverstellung viel schneller reagieren können, ist 0,28 genau richtig oder vielleicht sogar schon zu viel.
Woher ich das weiß? Es gab vor einer Weile mal ein Update, bei dem der Name des Parameters geändert wurde. Und der Parameter mit dem neuen Namen wurde auf den Defaultwert gesetzt. In MP kann man Parameterdateien vergleich und anzeigen lassen, welche Werte sich geändert haben. Aber weil der Parameter jetzt einen neuen Namen hatte, wurde der nicht als geändert angezeigt. Ich bin also mit dem Defaultwert von 0,5 geflogen und habe in Altitude hold umgestellt. Die Reaktion war dermaßen heftig, dass es mir den Heli fast in der Luft zerlegt hat. Ich habe dann ganz schnell wieder zurück in Stabilize geschaltet und dann war es okay. Aber wenn das bei 0,5 passiert, will ich lieber nicht wissen, was 1,5 macht.
Also nochmal zu Deinem Problem: Du hast ein vertikales Auf- und Abhüpfen des gesamten Hubschraubers, richtig? Keine Nick-Schwingung. Stimmt das? In dem Fall würde ich den PSC_ACCZ_P mal ein bisschen herunter nehmen. Vielleicht auf 0,2 bis 0,25. Zu wenig ist da nicht besonders schlimm. Dann hält er einfach die Höhe schlechter.
den PSC… wollte ich auch nicht höher machen, sondern jetzt unter den 0,28.
Ist richtig: der Heli hüpft auf und ab, keine Nickschwingung.
Bei Deinem Wissen meinte ich nicht nur den einen Parameter, sondern alles.
Da muss man ja schon fast Entwickler des Programms sein.
Ohne Deine Hilfe und dann noch auf Englisch hätte ich (und viele andere) überhaupt keine Chance.
Um etwas zu verstehen und Änderungen zu versuchen, muss man ja erstmal wissen, dass es den / diese Prameter gibt, wo sie sind und wie sie wirken.
Es war interessant Eure Komentare zu lesen und ich kann sagen, dass Du Glueck hast, dass es Felix ist der es so gut erklaehren kann. Ich haette es nicht gekonnt, obwohl ich selber 2 sehr gut fliegende Helis habe.
Weiterhin viel Glueck und keine craches! Btw nice photos.
es freut mich ja, wenn ich helfen kann. Ich denke, ich habe mich inzwischen einfach ganz gut in die Thematik eingelesen. Und natürlich habe ich ganz viel von Chris und Bill gelernt, deren Ardupilot-Wissen ja einfach unübertroffen ist! Ohne die beiden würde es hier im Traditional-Helicopter-Forum sehr schlecht aussehen. Thanks a lot, @ChrisOlson and @bnsgeyer for all your effort and time you put into this forum and ardupilot in general!!!
Was Deinen Heli angeht, Holger, klingt es ja alles schonmal sehr gut. Vielleicht kannst Du mir beim nächsten Flug einfach mal einen Log aufzeichnen, dann kann ich mir anschauen, was es evtl. noch an Einstellungen zu machen gäbe. Aber ich glaube, Dein Hüpfen haben wir jetzt im Griff und das mit dem Kompass kriegen wir auf jeden Fall auch noch hin.
Ich weiß leider noch nicht, ob ich es zeitlich zur Rotor-live schaffe. Aber so weit wäre es von mir aus ja gar nicht. Wenn es geht, würde ich auf jeden Fall gerne vorbei schauen…
hallo Fred und Felix,
Felix nimmt mir die Worte voraus,
ohne diese detaillierten und verständlichen Angaben käme ich nicht zurecht. Insofern natürlich auch thanks to Bill and Chris!!
Ich bin ja von null auf hundert innerhalb kurzer Zeit auf den FC gekommen, wusst vorher überhaupt nichts.
Insofern ist es schade, dass das ganze -insbsondere für uns Heli-Piloten, aber auch Flächenflieger, nicht irgendwie zugänglicher und einfacher ist. Ich denke, dann würden viel mehr auf diese genialen und ja auch nicht teuren Sachen kommen.
Andererseits, wenn es nur kommerziell wäre, sähe es auch schon wieder anders aus.
Dann warte ich wieder mal ungeduldig auf passendes Wetter.
Hallo Felix,
heute schönes Wetter, also los.
Im gropßen und ganzen schon besser geworden, aber noch nicht ganz.
Stabi
geht nach neuem ausleveln jetzt gut und hält ihn auch knackig. allerdings fliegen damit eher unkomfortabel, sehr direkt und eckig. ist wohl wirklich nur zum Stabilisieren. habe die 3 Stabi P-Werte etwas runtergenommen = etwas lockerer.
Höhe halten
macht er soweit gut, wobei ich mit dem PSC jetz auf 0,15 runter bin. Er hat aber auch (beim Umschalten) eine leichte tendenz nach unten, muss den pitchknüppel ziemlich nach oben nehmen. Höhe regeln nach unten geht gut, nach oben steigt er selbst bei Anschlag nur gaaaanz langsam. Das war bei früheren Versuchen schon deutlich besser.
Ist allerdings noch nicht gut bei Pos hold und loiter, s.u.
Pitchkurve (im Sender) ist so, dass ich bei Knüppelmitte mit ca. 5 -7 Grad gut schweben kann.
Pos Hold
ging die ersten Flüge überhaupt nicht, schien eher zu einem imaginären Punkt driften zu wollen. (Allerdings keine Fehlermeldungen, GPS 3 D = o.k.)
Allerdings habe ich zwischendurch die Einbaulage (für den Compass) korrigiert. Er zeigte Bewegungen immer korrekt an, allerdings zu weit südlich.
Da ich den FC um 180 Grad nach hinten gedreht eingebaut habe, hatte ich den wert bei AHRS auch um 180 Grad korrigiert. nun bin ich auf 135 Grad gegangen, und die Richtung stimmt genau …?
beim letzten Flug ging dann Pos hold sehr gut (bis auf die oben beschriebene Höhe).
allerdings hat er hier im Ansatz auch mal hoch und runter gewippt, sich dann aber meist wieder gefangen.
Optisch sieht es so aus, als wenn er nur vorne hoch und runter wippt, hinten steht er (gefühlt) still.
loiter
nur einmal kurz probiert, da er sich hier sehr heftig in der Höhe aufgeschaukelt hat.
Steuereingaben
insbesondere bei stabi, aber auch ein bischen bei acro (und pos hold) macht er bei roll und nick-eingaben zusätzlich yaw-werte (auch z.T. in anderen Kombinationen, kann ich garnicht genau beschreiben).
kann am Boden nicht nachvollzogen werden, da laufen die servos richtig.
Die Anlenkungen am Rotorkopf sind nicht ganze rechtwinklig, so dass roll und yaw auch immer ein bischen nach vorn bzw. hinten ausschlagen. wegen der Gegenläufigkeit der Rotoren hebt sich das aber normal auf. Und geringe Abweichunen wurden vom Bavarian bislang ausgesteuert.
Allgemein
der PIX ist bei mir nicht im Schwerpunkt / drehpunkt. kann / muss man das (wo?) korrigieren?
Beim Bavarian kann man den nickausschlag vorn prozentual verringern, soll angeblich besser fliegen.
geht das hier auch?
Wenn man nick nach vorn oder hinten gibt, hat ja in dem moment der absinkende Rotor weniger und der aufsteigende mehr benötigtes Drehmoment, was zu einem leichten Drehimpuls um die Hochachse führt. ist bei kurzen kräftigen Ausschlägen auch beim Bavarian zu sehen, normal steuert er das aus.
Hatte früher im Sender schon mal yaw zu nick dazugemischt, geht prima.
Hier auch? ich meine, bei den H_ Einstellungen etwas gesehen zu haben.
Logging
lt. MP hat er nur zwei dateien aufgezeichnet (bei bestimmt 15 kurzen Flügen).
downgeloaded sieht das so aus:
freut mich, dass Deine Flüge gut verlaufen sind. Scheint ja so, dass Du langsam einen wirklich brauchbaren Heli hast. Nun aber zu Deinen Fragen:
Was genau meinst Du mit „Stabi P-Werte“? ATC_ANG_PIT_P; ATC_ANG_RLL_P und ATC_ANG_YAW_P? Es gibt ziemlich viele Parameter und da kann es leicht zu Verwechslungen kommen. Grundsätzlich ist es aber sehr gut, wenn der Heli direkt und „knackig“ reagiert. Genau diese Parameter nutzt der Autopilot ja auch und je präziser und schneller er den Heli steuern kann, desto besser. Von daher bin ich noch etwas skeptisch, ob es gut war, die Werte herunter zu nehmen. Ich habe die Vermutung, dass Du eher allgemein noch nicht gewohnt bist, im Stabilize-Modus zu fliegen. Ich fand das anfangs auch etwas gewöhnungsbedürftig. Du musst bedenken, dass Du jetzt nicht wie sonst immer beim Fliegen eine Drehrate, sondern eine Fluglage (Attitude) vorgibst. Wenn Du den Heli neigen willst, bewegst Du den Stick, aber wenn Du ihn wieder loslässt, bewegt sich auch der Heli wieder in die Horizontale zurück. Man kann ihn also nicht kurz antippen, um irgendwohin zu fliegen, sondern muss den Stick immer halten. Ist wirklich ein bisschen komisch. Wenn’s Dir nicht gefällt, kannst Du auch alles mal im Acro probieren. Das fühlt sich natürlicher an.
Falls Dir der Heli auch im Acro zu aggressiv reagiert, versuch mal ATC_INPUT_TC etwas herunter zu nehmen. Die Werte die der Autopilot mit nutzt, würde ich dagegen lieber hoch lassen (bzw. wieder hoch stellen).
PILOT_SPEED_DN und PILOT_SPEED_UP heißen die Parameter dafür. Wenn die aber passen und der Heli sich nicht daran hält, stimmt irgendwas grundsätzliches nicht mit Deinem Setup. Z.B. halte ich 0,15 für PSC_ACCZ_P für ein bisschen sehr niedrig. Oder Deine Einstellungen für H_COL_MAX, H_COL_MID und H_COL_MIN passen nicht. Das könnte auch Dein Absacken beim Umschalten in höhenkontrollierte Modi erklären.
Die Pitchkurve sollte auch eigentlich nicht im Sender sein, sondern im Pixhawk. Schau Dir einfach nochmal die Setup-Videos von Chris Olson an. Die sind wirklich klasse! Wenn Du die ganz sauber befolgst, funktioniert auf einmal alles. Es ist ganz wichtig, das Setup so sauber wie möglich zu machen. Dann erspart man sich eine Menge Ärger und solche Probleme, von denen man nicht genau weiß, woher sie eigentlich kommen.
Es kann sein, dass Dein Kompass im Gehäuse um 45° gedreht eingebaut ist. Das müsstest Du unbedingt herausfinden. (Manchmal sieht man’s auch gleich, wenn man ihn aufmacht.) Ich sagte ja: Kompass-Kalibration ist sehr wichtig. Unbedingt auch vom externen Kompass. Ansonsten kannst Du nicht erwarten, dass Dein Heli sauber fliegt. Die Richtung sollte schon so auf etwa 1 bis 2 Grad genau stimmen. Und zwar unabhängig davon, wohin die Nase gerade zeigt. Manchmal stimmt der Kompass ziemlich genau in einer bestimmten Richtung, aber sobald Du den Heli ein Stück drehst, liegt er völlig daneben. Wie gesagt: Ein sauberes Setup ist das A und O.
Genau verstehe ich das noch nicht. Vielleicht machst Du mir mal ein Bild davon? Aber es klingt schon so, als könnte das Deine Probleme verursachen. Kannst Du die Anlenkungen irgendwie anders realisieren? Aber auch da gilt: Je härter Dein Tuning ist und je direkter Dein Heli reagiert, desto besser kann der Autopilot solche Dinge aussteuern.
Also ganz genau kann man den Controller natürlich nicht immer in den Schwerpunkt setzen. Aber so ungefähr sollte es schon stimmen. Gerade weil Dein Heli als Tandem so lang ist. Ansonsten steuerst Du eine Nick-Bewegung und der FC misst eine vertikale Beschleunigung. Die versucht er dann natürlich fälschlicherweise zu korrigieren und schon hast Du irgendeine merkwürdige Nick-Pitch-Kopplung. Vielleicht kannst Du Deinen FC so verschieben, dass er ungefähr im Schwerpunkt sitzt? Geht das bautechnisch?
Das weiß ich leider nicht. Habe ich bisher noch nie gebraucht. Aber vielleicht gibt es das. Wenn ja, dann findest Du es bestimmt auch irgendwo auf den Ardupilot-Seiten dokumentiert…
Deine Logfiles kannst Du z.B. einfach in die Dropbox laden und mir dann den Link schicken. Ich suche mir dann schon raus, was ich brauche.
Hallo Felix, danke für die wieder sehr umfangreiche Antwort!
erst nur kurz zu Deinen Anmerkungen:
mit den 3 Stabi-P-werten meine ich die im extended tuning oben. die standen alle drei vorgegeben auf 4,5.
wie gesagt, etwas reduziert, etwas besser.
Werde aber im Stabi-modus wohl nicht so vile fliegen, eher acro oder ggf. Sport (den ich noch nicht probiert habe).
ist es richtig, dass die Stabi-Werte (“meine” 3 und die von Dir genannten) auch bei Pos, loiter, Sport usw. genommen werden? dann müssen sie natürlich in Ordnung sein.
Acro geht schon weitgehend gut.
Für loiter kann man im extended ja auch eine Menge einstellen…
Höhe
den PSC Wert hatte ich erst auf 1,8 - dann wg. leichten Schwingungsansätzen bei Pos auf 1,5.
Verdacht?: ich hatte ja gesagt, dass es aussieht, als wenn er nur vorne hoch- und runterschwingt, und hinten steht.
kann es sein, dass sich hier die Höhenschwingung mit einer Nickschwingung vereinigt und die sich vorne addieren und hinten (gegenläufig) neutraliesieren? dann wäre ja ggf. irgendein Stabi - P - wert zu verringern, um den PSC wieder erhöhen zu können.
Pitchkurve: habe ich auch schon dran gedacht, ging beislang aber (auch bei meinem Freund) und ist ja im Sender leichter einzustellen. Allerdings fehlt dann dem FC logischerweise der gesamte Knüppelweg.
werde ich probieren.
Compass: wäre eine logische Erklärung, denn er zeigt jetzt exact (Vergleich mit anderem kompass) die Richtung, auch beim Drehen.
Anlenkungen: Vom normalen 2Blatt-Heli kennst Du es, dass bei roll oder nick ein Rotorblatt längs / 90 Grad quer stillsteht / vollen Ausschlag hat. Geht bei dreiblatt auch noch, wenn die Blattanlenkung weit nach innen ragt. Die Blattlagerwelle muss mit dem Anlenkungspunkt einen rechten winkel mit Ecke über der Rotorwelle bilden. Ist bei meinen Köpfen nicht so. Wenn das nicht der Fall ist, kommt zum Roll / Nickausschlag immer eine seitliche Komponente mit dazu. das kann man mit der elektronischen Taumelscheibenverdrehung ausgleichen, hat der PIX auch (irgendwas mit PHANG…)
aber nur mit 3 oder 4 Servos. ich habe ja bislang nur 2 (Bavarian macht auch nicht mehr…) werde aber auf 3 Servos nachrüsten.
Nur normalerweise heben sich diese Effekte bei zwei gegenläufigen rotoren auf. Kannst du auch in meinem Bericht in der Rotor nachlesen.
Einbaulage: Der PIX ist bei mir um 45 cm vom Schwerpunkt nach vorn verschoben. Genau Schwerpunkt geht wg. Antrieb (derzeit) nicht. Umbau der ganzen Kabelage ist aufwändig. Den Bavarian (und andere FBL’s) hat das bislang nicht gestört.
YawZumischung: geht über H_DCP_YAW, genügt ein sehr kleiner Wert, aber noch nicht geflogen.
Logfiles in Dropbox versuche ich hinzukriegen (peinlich: auch noch nie gemacht…)
dann sprechen wir über dieselben Werte. Ich habe gerade nachgeschaut. Deine-Stabi-P Werte aus dem Extended Tuning sind eigentlich die ATC_ANG_XXX_P-Werte in der Full-Parameter-List. Und ja, die fließen auch für die Regelung durch den Autopiloten mit ein. Von daher würde ich sie lieber auf 4,5 lassen. Der Wert passt eigentlich auch ganz gut, denke ich. Das ist relativ unabhängig vom Modell, weil sie beschreiben, wie eine Abweichung zwischen Soll- und Ist-Attitude in eine Drehrate umgewandelt wird. Das heißt aber auch, sie werden immer verwendet, wenn Du eine Attitude-Vorgabe hast (sprich auch in Pos hold, Loiter usw.) Nur eben in Acro nicht.
Stimmt. Aber da auch das nicht modellspezifisch ist (mal abgesehen davon, dass Du vielleicht bei einem sehr großen Hubschrauber willst, dass der etwas weicher manövriert), würde ich die Werte mal alle so lassen, wie sie sind. Da hat u.a. Chris schon viel Zeit rein gesteckt und das ist ziemlich gut so wie es ist.
Vieles ist im Sender einfacher einzustellen. Aber der Autopilot braucht diese Information ja. Sonst kommt es eben zu solchen Sprüngen usw. wie Du sie hast. Wie gesagt. Mach mal in Ruhe die Setup-Videos durch, dann funktioniert sicher schonmal alles besser. Das braucht halt seine Zeit.
Teste zur Sicherheit aber auch nochmal, ob das mit der Karte übereinstimmt. Du könntest ja z.B. die Nase auf einen großen Baum in der Ferne zeigen lassen und dann schauen, ob deine Linie in MP genauso auf den Baum zeigt. Dann bist Du sicher, dass der Kompass stimmt. Funktioniert Dein externer Kompass denn nun? Das wäre schon gut.
Ich verstehe nicht ganz, wie das bei Dir mit nur 2 Servos funktioniert. Wie kannst Du damit eine TS mit Pitchverstellung ansteuern? Aber auf jeden Fall muss die Taumelscheibendrehung passen. Mag sein, dass sich durch Deine Tandem-Anordnung einiges kompensiert und dass sich da ein gut eingestellter Flugcontroller nichts anmerken lässt und das alles brav aussteuert. Aber Du machst es dem Controller damit ganz schön schwer. Und das heißt natürlich auch wieder: Du kannst gar nicht bis an die Grenzen tunen und Dein Autopilot wird seine Aufgaben schlechter und ungenauer erledigen als er theoretisch könnte, es kann zu irgendwelchen Schwingungen/Pendelbewegungen kommen usw. Wenn Du sowieso vor hast, auf 3 Servos umzurüsten, würde ich vorschlagen, Du machst das zuerst, denn alle Zeit die Du jetzt ins Tuning und die Bekämpfung irgendwelcher komischer Autopiloten-Probleme steckst, ist eigentlich unnötig, weil mit 3 Servos vermutlich eh alles anders (und sehr wahrscheinlich auch besser) ist. Selbst wenn sich die Effekte vollständig kompensieren, sind Deine Tuningwerte völlig andere, weil die Ausschläge an den Taumelscheiben ja ganz anders sind.
Wenn Du kannst, würde ich den Pixhawk dann im Zuge dieser Umbauten auch näher an den Schwerpunkt setzen. 45 cm sind schon ne Menge.
Ich weiß, ist alles viel Arbeit. Aber wie gesagt: Meine Erfahrung ist, dass sich die Arbeit, die man in ein sauberes Setup investiert mehr als bezahlt macht. Die ganze Zeit sparst Du hinterher wieder ein, wenn Du Dich nicht mit irgendwelchen merkwürdigen Problemchen rumschlagen musst, von denen keiner so recht weiß, woher sie eigentlich kommen…
hallo Felix,
habe wieder gewerkelt.
jetzt jeweils 3 servos und die Verdrehung, jetzt geht alles rechtwinkelig.
Auch die Pitchkurve im MP eingestellt bei 100% Knüppel im Sender.
Der Kompass zeigt wirklich genau, stimmt mit der Landschaft und einem anderen elektronischen Kompass direkt überein. Poshold hatte er ja auch bestens gemacht.
beim Tandem reichen normal 2 Servos pro Taumelscheibe, da nur die Rollbewegeung (für roll und yaw) gesteuert wird. Nick geht ja über unterschiedliches pitch hinten und vorne, die Taumelscheiben sind in nickrichtung gesperrt. das erreicht man durch jeweils 2 v-förmige anlenkungen, also von einem Servo zu zwei Punkten an der TS. dadurch ist sie in nickrichtung arretiert.
Oder eben durch ein 3. Servo. das ja nur bei collective pitch und nick gleichzeitig mit den beiden anderen Servos rauf und runtergeht.
Was mache ich aber, wenn er sich doch bei althold aufschwingt?
Die Blattaufhängungen sind hoch und runter beweglich und gedämpft, muss beim Tandem so sein, sonst erreicht man nicht die für yaw erforderliche gegensinnige Rotorkreisverschränkung.
Da er sich ja nicht wie ein “normaler” bei roll (und und hier yaw) zur seite neigen kann, müssen das die Rotorkreise übernehmen.
Tandem mit starrem Rotorkopf und steifen Kohleblättern ist um die Hochachse fast nicht zu steuern.
gibt es außer dem PSC_ noch einen anderen Wert, den man dann probieren könnte?
bei loiter war das aufschwingen ja gefühlt besonders stark.
Hallo Felix,
noch ein kleiner Nachtrag:
habe mir die Videos nochmal angesehen. eigentlich habe ich mit den mittlerweile ganzen Verbesserungen alles richtig gemacht.
Einzig H_SV_MAN hate ich bislang noch nicht genommen. Col_max und _min konnte ich ja so einstellen.
Die Mitte ging allerdings nicht.
Jetzt bei H_SV_MAN geht das Verstellen in der Mitte.
Allerdings bei _min und _max zieht er die TS schief, d.h., 2 Servos gehen nach oben, eins nach unten.
Muss man das zwingend über diesen Punkt machen?
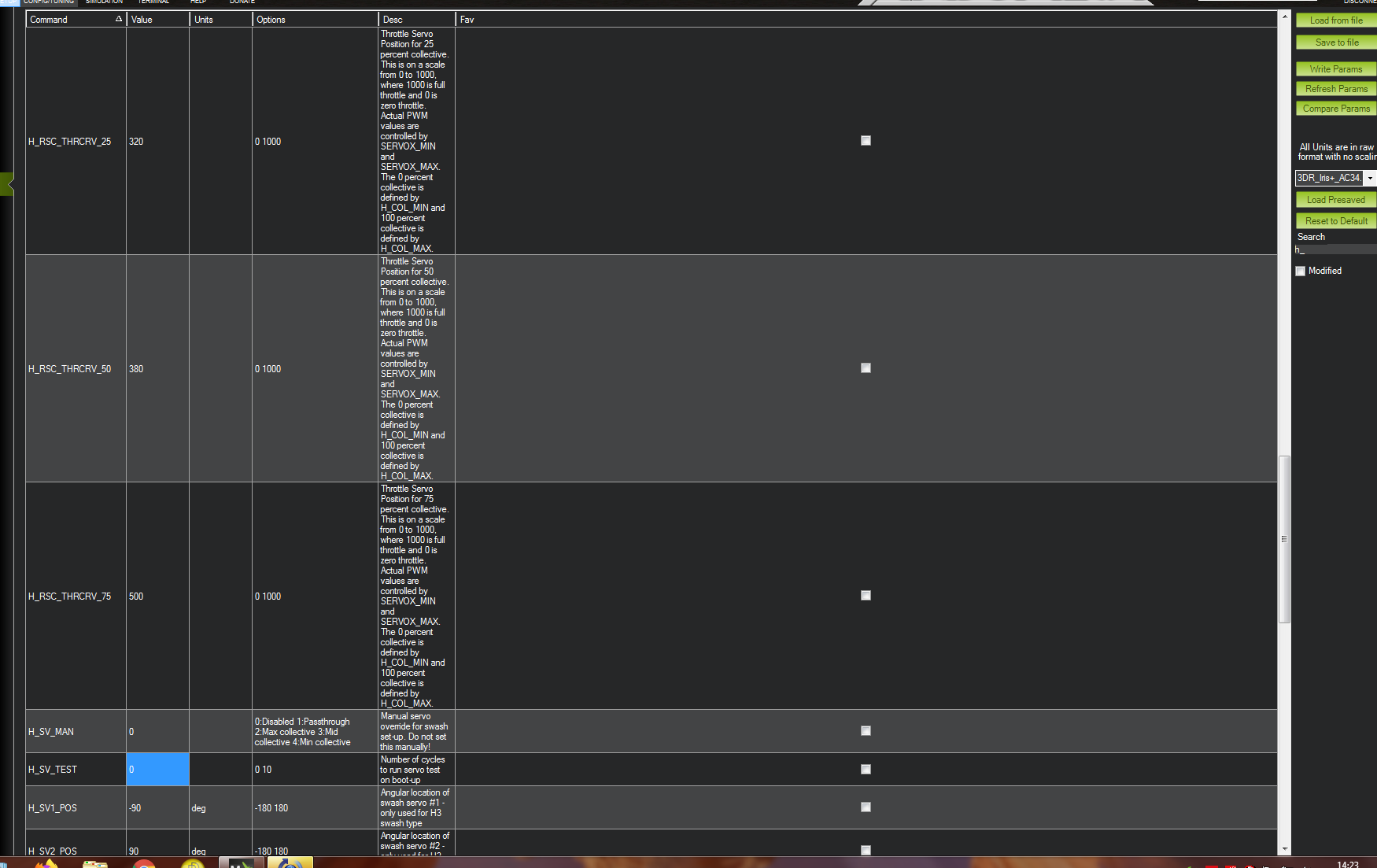
Und nochmal MP: seit heute ist in der Param-Liste die Darstellung so. Ich kriege die Reihe rechts, wo man das häkchen machen kann, nicht kleiner.
hello,Holger,
I set H_RSC_MODE to 3, and the throttle reaches the fixed speed when the input of the 3 channels of the remote control reaches 25%. But I haven’t flew up yet. My aircraft body shakes very much.
Hallo Felix,
nach Hinweis von einem anderen Kumpel habe ich mit “Sensor Position Offset Compensation”
die 45 cm eingestellt - das war die Lösung. Kein horizontales Schütteln mehr, scheint alles gut.
Nachdem der externe Kompass jetzt auch richtig geht, bleiben die TS beim hochlaufen auch gut gerade, war wohl auch eine Ursache.
Heute alles nur kurz probiert, scheint alles zu laufen, werde weiter berichten.
das sind doch schonmal riesen Fortschritte! Klasse!
Heißt das, Du hast Deinen externen Kompass jetzt auch kalibriert bekommen? Ansonsten kannst Du mal einen Log machen, wie Du den Heli in alle Richtungen drehst und mir dann schicken. Dann kann ich Dir sagen, ob die Einbaurichtung stimmt. Das wäre nämlich ein Grund, warum er sich nicht kalibrieren lässt.
Ah okay. Jetzt verstehe ich das mit Deinen zwei Servos an jeder TS endlich. Aber warum brauchst Du dann eine virtuelle TS-Verdrehung?
Das ist ja interessant. Du hast schon bei althold solche Probleme? Das ist ja quasi der unterste automatische Flugmodus. In dem Fall schick mir einfach den Log, dann schaue ich mir das mal an…
Mit den PSC_ Werten hängt das dann aber nicht zusammen. Der PositionController ist ja im AltHold gar nicht aktiv.
Ohh, dann stimmt da aber einiges nicht! Die richtige (und möglichst präzise) Einstellung von H_COL_MAX, H_COL_MID und H_COL MIN ist von größter Wichtigkeit! Wenn der Controller das nicht hat, kannst Du nicht erwarten, dass irgendwas funktioniert. H_SV_MAN ist übrigens nur ein Parameter, den Du für die Einstellung verwenden musst. Der wird aber soweit ich weiß bei jedem Reboot zurückgesetzt, damit Du nicht versehentlich mit einer falschen Einstellung starten kannst.
Schau Dir bitte nochmal die Setup-Videos von Chris genau an und mache wirklich alles Schritt für Schritt genau so.
Wenn Du zu irgendeinem Punkt Fragen hast, helfe ich Dir gerne weiter.
Zu Deinem Problem mit der MP-Darstellung: Wenn Du mit der Maus ganz oben exakt auf die senkrechte Trennlinie zeigst, müsste eigentlich ein „Verschieben-Symbol“ auftauchen. Bei Dir nicht?
@moluav: Are you flying electric? In that case you could use H_RSC_MODE 2 and the governor of the ESC. I’m doing it like that with my machine.
Perfekt. Der Parameter war mir jetzt übrigens auch neu. Ich habe im sehr hohen Geschwindigkeitsbereich auch Probleme mit leichten Nick-Schwingungen und habe das bisher aber immer aufs Tuning geschoben. Vielleicht liegt es ja daran. Werde ich auch mal ausprobieren.
Habe mir gerade Deine Logs angeschaut und ein bisschen aufgeräumt. Da waren ja sehr viele Dabei, in denen der Heli gar nicht geflogen ist. Grundsätzlich schaut’s ja schonmal nicht so schlecht aus. Das Tuning könnte man noch etwas verbessern. Probier mal ILMI auf 0.008 zu stellen. Das sollte noch problemlos gehen. Dann hält sich der Heli auch viel besser an Deine Attitude-Vorgaben und driftet nicht. Ansonsten habe ich das Gefühl, dass Deine P-Werte allgemein noch ein bisschen höher eingestellt werden könnten. Für mich sieht das so aus, als würde der Heli ein bisschen ungenau/schwammig fliegen. Kann das sein? Schau Dir mal den Tuning-Guide an und hangle Dich daran entlang.