But with the new acro-trainer mode, the helicopter is also trying to level out, so you would also have to fight it in case of an attitude error, right? Especially if the “limiting feature” is active. With that I meant ACRO_TRAINER set to 2 which is “Leveling and Limited”. It think that means the lean angle is limited to the stabilize limit? By the way: I searched for that parameter and just found ANGLE_MAX. There it says “Maximum lean angle in all flight modes” That can’t be true. I’ve set that to the default of 4500, but I know, that I have flown bank angles way greater than 45 degrees in acro. I just confirmed that with my logs. I also had ACRO_TRAINER set to 2.
I’m really sorry to hear that! Recently? The helicopter we saw the logs from?
Oh, I just realized, that the leveling out of the helicopter isn’t coming from the new acro feature. I was a bit confused, because for the BAL-parameters it says “rate at which roll/pitch angle returns to level”. But that isn’t applicable to helicopters, right? It’s leveling out because of ACRO_TRAINER set to 2? That’s why I said, I didn’t want to turn the feature up further. I didn’t want the helicopter to level out so fast.
That’s correct. But the virtual flybar does not work with that turned on.
On that, I am not sure. In 4.0 that might have been fixed. In 3.6 when we worked on the virtual flybar mode if I remember right it would allow up to 90 degrees with leveling and limited in acro.
Then you are not using the virtual flybar. The virtual flybar is default for helicopters and it only works if the trainer option is set to zero. Then the BAL settings determine how fast the desired attitude from the stick input decays back to the actual attitude. It simulates the action of a flybar. Except it is adjustable without having to change flybar paddles or weights.
@picoflug it is default for heli if the acro trainer is turned off. Then the acro BAL settings will set how you want it to work. At BAL of 3 it will be pretty much direct stick to swash response. for BAL of 0 it will be like many FBL units without “virtual bar” - move the stick, the frame rotates to that attitude and holds. If you want the natural flybar “feel” then set the BAL’s someplace in between.
hello friends,
now the tandem is nearly flying good.
But now a problem with teh compass. meanwhile i have 3 miniPIX, one in single, two in each of the tandems. on all i have 4.0.3.
in the single the position is “yaw 180”. calibration no problem, POSHOLD very good.
In the tandems I have the compass position “none” (= in flight direction).
after calibration it shows the right direction on the map, but it changed the Position automaticly to “yaw270”. And i have heavy toilet-bowling in POSHOLD.
I switched back to “none” and calibratet new a few times - the same: it switches again to “270”.
Hello Felix,
every compass/GPS from the 3 PIX is used as external. The problem / phaenomen is new and only at 2 ones, the 3. is working ok.
“automatically learn offsets” is always “off”, when I switch it on, on the next start it ist “off” again.
After installing Firmware it is all times at “none” - how I switched. But now (new) after calibration and rebooting both PIX with “none” they switches to “270”. In the map the direktion is correct than, but it has the toilet-bowling.
how can that happen?
verstehe ich das richtig, dass Du den Haken bei „Externally mounted“ gesetzt hast? Und wichtig ist natürlich auch, dass es nur beim Richtigen gesetzt ist. Die anderen beiden Kompasse sind ja intern und dürfen den Haken nicht haben. Kennst Du die Funktion zum Live-Plotten von Daten in MP? Damit kannst Du herausfinden, welcher Kompass welche Nummer hat. Ansonsten fällt mir leider auch nichts ein, woran das liegen könnte.
Hallo Felix,
ich verstehe es auch nicht. Ich habe bei allen drei nur den externen Kompass im GPS aktiv und die Häkchen entsprechend bei allen gleich gesetzt.
Beim single funktioniert das ja auch prächtig, wobei ich bei dem einbaubedingt “yaw180” habe.
Bei den beiden anderen ja auf “none”.
Ich werde nochmal rumprobieren. Beim tandem ging es zuerst ja auch, da war aber noch 3.6 drauf.
Ich habe ja wieder ein bisschen die 4.0 in Verdacht …
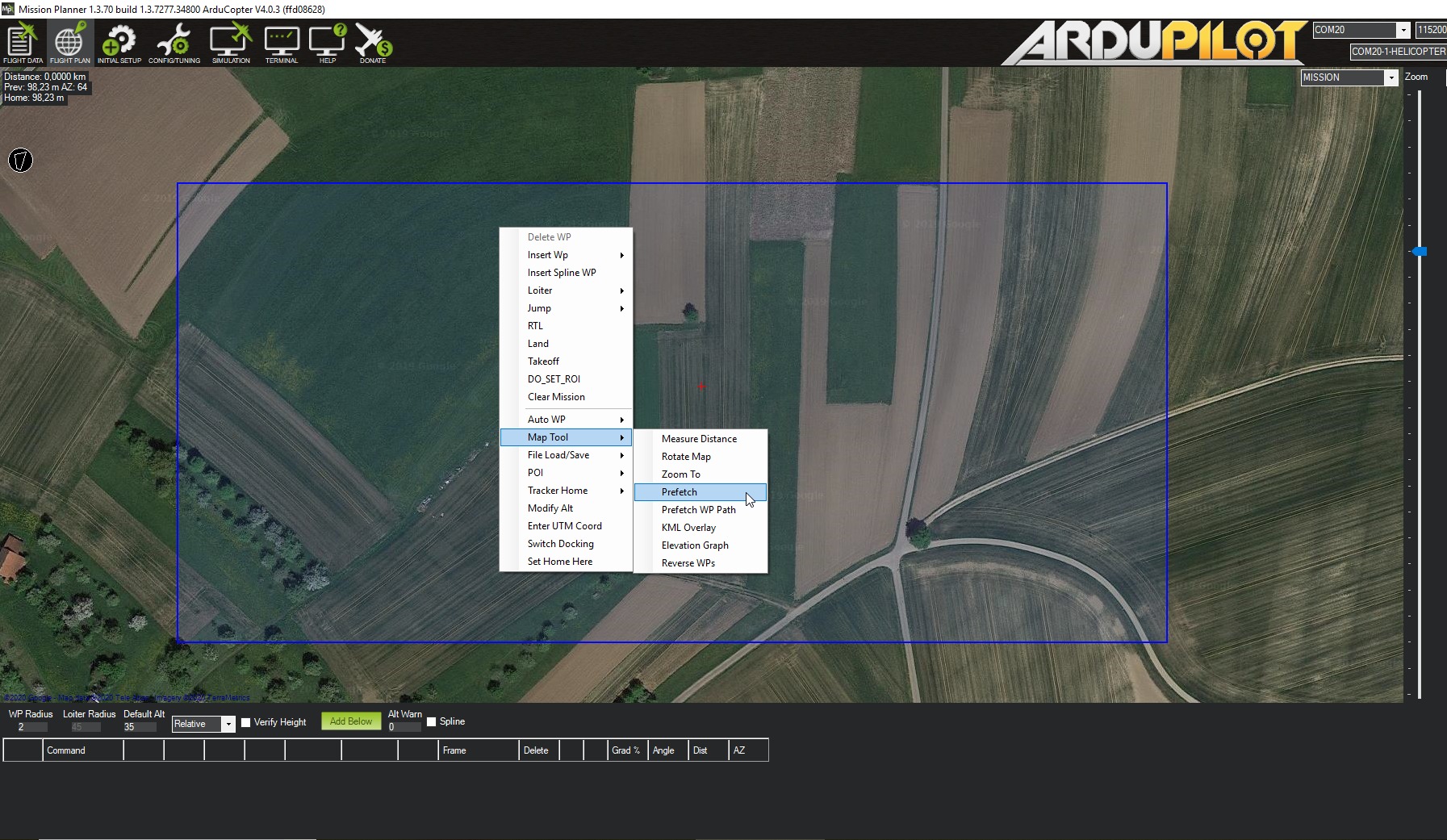
Andere Frage zu MP: Wenn ich mit dem Laptop außerhalb “meines” W-Lan bin, kann ich die Karte nicht richtig vergrößern (reinzoomen) - sie wird dann sehr pixelig. Kann man die Karte irgendwie vorher entsprechend speichern?
Hello Felix,
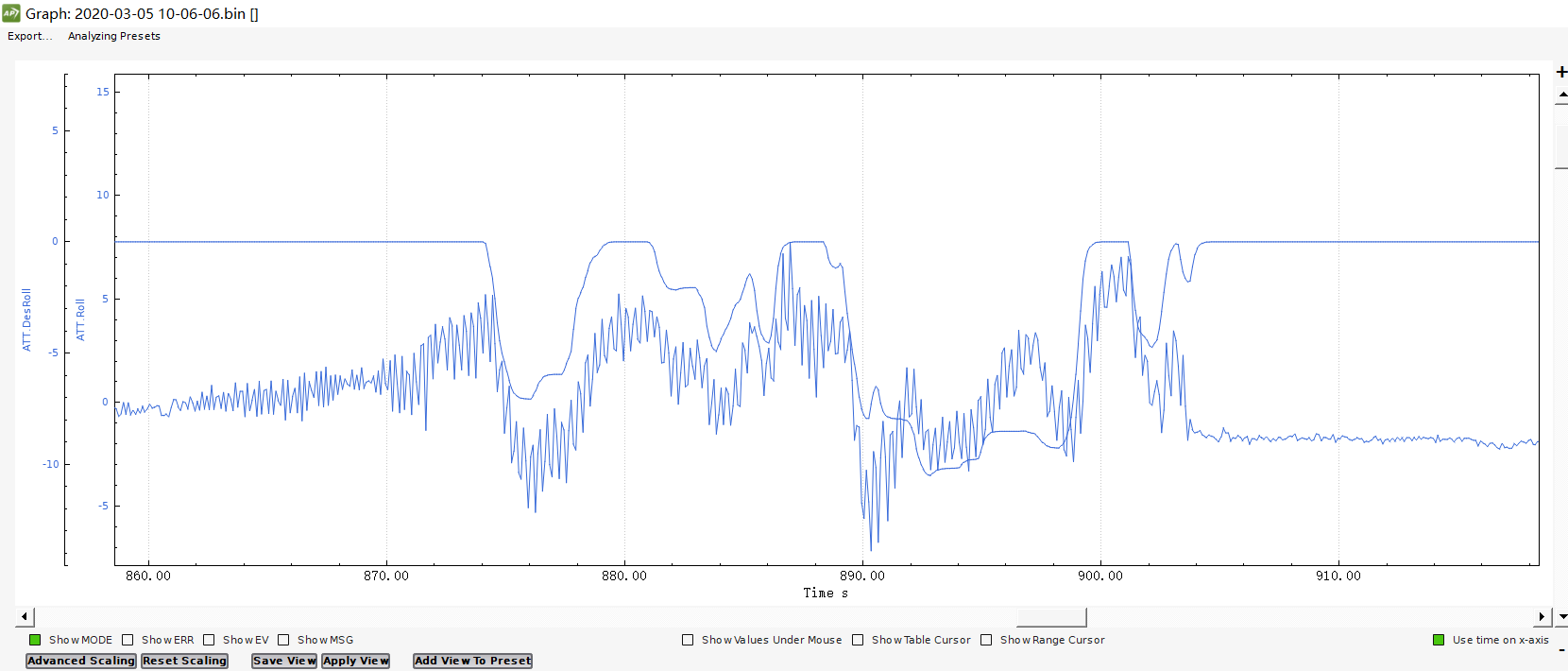
Could you please help me to see what is the reason for the roll axis output.from the perspective of ROLL tracking trends, the ATT.ROLL can keep up with ATT.DESTROLL, but what is the reason for the many sawtooth waveforms on the ATT.ROLL axis?Is the problem with the PID?
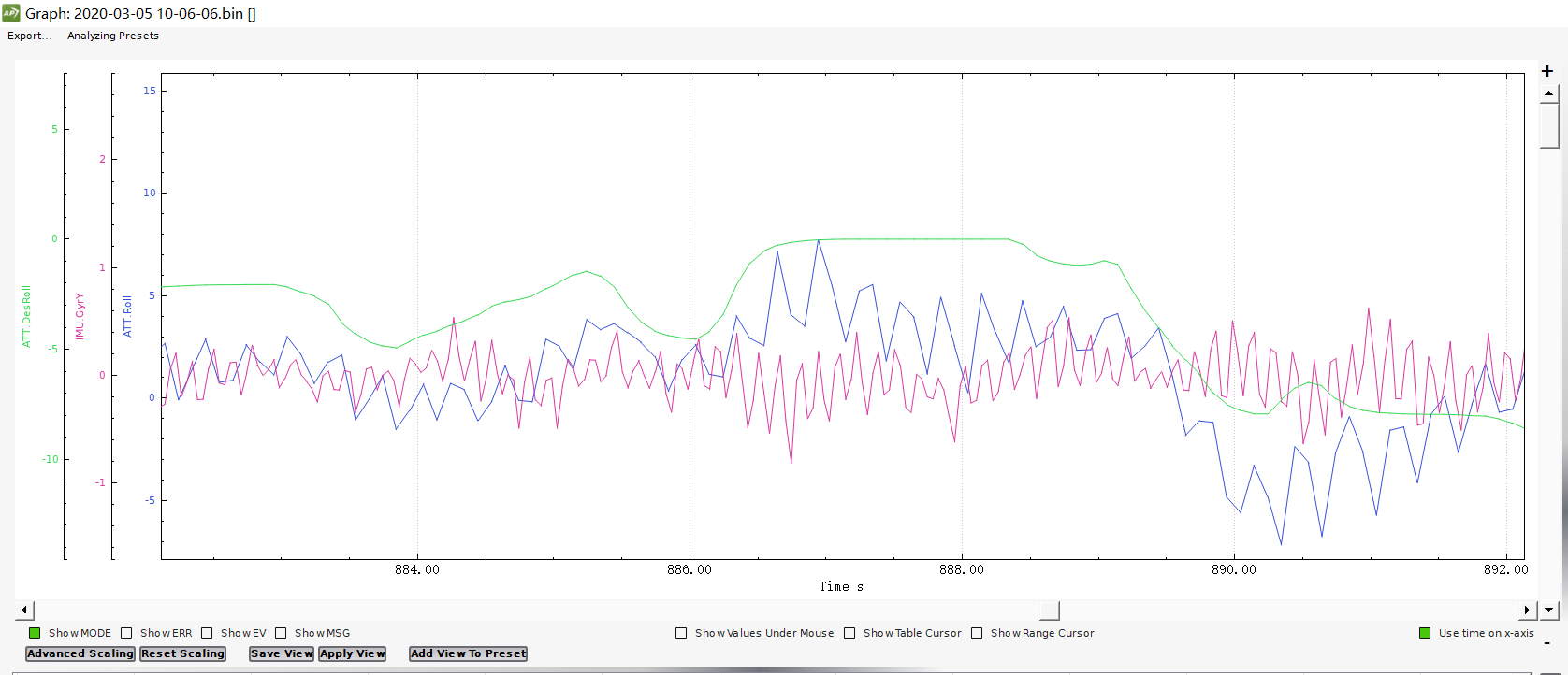
I showed the Y-axis data of the IMU and found that the frequency of the sawtooth wave superimposed on ATT.ROLL is the same as the frequency of the Y-axis of the IMU. Does it mean that it is caused by the vibration of the IMU?Is this normal?
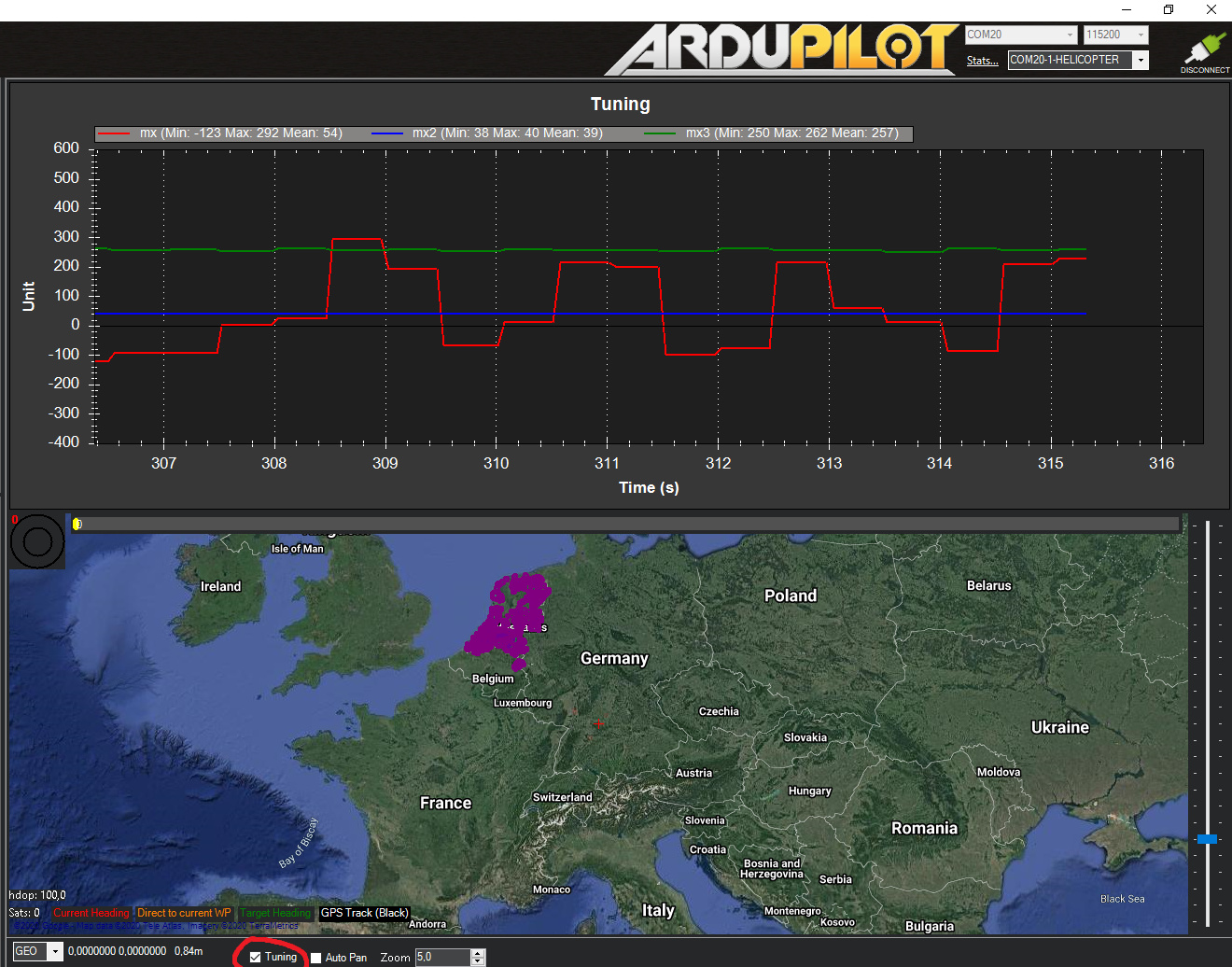
Das scheint bei Dir wohl nicht richtig zu funktionieren. Für interne Kompasse hängt das mit der Board-Einbaurichtung zusammen (AHRS_ORIENTATION). Ist die bei Dir korrekt eingestellt? Vielleicht hängt es auch damit zusammen, dass Du einfach alle Kompasse als „Externally mounted“ definiert hast. Wie immer empfehle ich erstmal das Setup sauber zu machen. Dann kommen wir sicher Deinem Problem auf die Spur. Du müsstest also erstmal herausfinden, welches Deine internen und welches Dein externer Kompass ist. Probier das mal über die Tuninganzeige:
Wenn Du jetzt den externen Kompass drehst und das Board unbewegt lässt, siehst Du, welcher ausschlägt. In meinem Fall war das jetzt Kompass 1. Dann setz mal die Häkchen richtig und probier das mit dem Kalibrieren nochmal. Ich würde außerdem empfehlen, auch die internen Kompasse zu nutzen. Das sollte Dein Endergebnis genauer machen.
Wenn Du die Karte im Voraus herunterladen willst, einfach auf den Reiter „Flightplan“ gehen, auf der Karte mit gedrückter ALT-Taste Deinen Bereich aufziehen, Rechtsklick, „Map Tool“, „Prefetch“. Ein Zoomfaktor von 19 oder 20 reicht normalerweise vollkommen aus.
@moluav: It looks like your aircraft is oscillating around the roll axis in flight. I’m pretty sure that is a problem with the PID tuning. Try reducing the PID values a little bit. I’d start with the P value. What you showed in your second picture is the gyroscopic sensor of the IMU. It’s measuring rotations. Not accelerations. So it’s not surprising it shows a reaction in about the same frequency range as your aircraft oscillations. But if I remember that correctly, GyrY is the rotation around the pitch axis. So you would have to plot GyrX to see the direct correlation to your roll oscillations.
So just try improving your tuning. I’m pretty confident, that this will solve your problem.
Ich habe in allen dreien lediglich den externen Kompass (Compass 1) aktiviert, mit den entsprechenden Häkchen. die Controller haben die richtige Orientierung.
Ich habe es vorhin nochmal im Garten probiert. habe den Kompass um 180 Grad verdreht und im Kompass-Menue entsprechend “yaw180” eingegeben.
Nach dem Kalibrieren zeigte er jetzt “yaw90” an (vorher ja 270), die Darstellung auf der Karte war aber auch wieder richtig.
und wie gesagt, beim Single-Heli geht es ja allerbest.
Ich habe beim Tandem jetzt noch mal 3.6 reingenommen. da geht es wieder richtig. will damit noch mal fliegen.
das mit dem 2. (internen) Kompass kann ich ja später auch noch mal probieren.
also es kann natürlich sein, dass die Einbaurichtung in Deinem GPS nicht mit dem aufgedruckten Pfeil übereinstimmt. Bei manchen GPS-Modulen ist das soweit ich weiß tatsächlich der Fall. Das würde natürlich erklären, warum das Offset immer auf einen anderen Wert springt. Solange die Darstellung auf der Karte exakt stimmt, funktioniert aber auch alles richtig. Dann kann Dein Toilet-Bowling nicht vom Kompass kommen.
Das mit dem internen Kompass würde ich trotzdem noch probieren. Es kann ja auch nicht schaden, noch eine Redundanz zu haben…
solange die Anzeige auf der Karte richtig ist, würde ich einfach mal davon ausgehen, dass es funktioniert. Seltsam ist es natürlich schon. Ich würde auch nochmal mit den internen Kompassen experimentieren (beispielsweise gar kein externes Modul anschließen) und schauen, ob es dann immernoch Unterschiede zwischen 3.6 und 4.0 gibt.
Das ist auf jeden Fall auch eine gute Idee. Vielleicht sind die Module ja doch unterschiedlich.
Schlechtes Tuning z.B. Welchen der Helis hast Du denn jetzt schon getuned? Vielleicht auch GPS-Empfang mit zu schlechter Qualität… Aber Verdächtiger Nr. 1 wäre natürlich schon der Kompass.
Hallo Felix,
habe mal die Kompasse vom Single und dem einen tandem ausgetauscht. Gleiches Ergebnis.
Der Single nimmt die vorgegebne richtige einbauposition von 180 wie vorher an und zeigt auch genau auf der Karte.
Beim tandem kommt es wieder zu dieser Abweichung, musste sie diesmal sogar “per Hand” auf 90 bzw. 270 stellen, damit die Anzeige richtig ist. Aber Kalibrierung immer erfolgreich.
Bin allerdings noch nicht wieder geflogen.
Sollte ein Fehler im PIX sein (dann ja sogar in zweien), kann man den irgendwie wieder “jungfräulich” machen, oder geht nur Aufspielen anderer FW?