hi:
I am using DWM1000 STM32 Development board to develop indoor loiter TAG, I have read the code [https://github.com/ArduPilot/ardupilot/blob/master/Tools/Pozyx/IndoorLoiter/IndoorLoiter.ino]

So I encode my communication protocol on stm32 ,and the pixhawk accept the data from my stm32,which means that the pixhawk get the pos data from my stm32
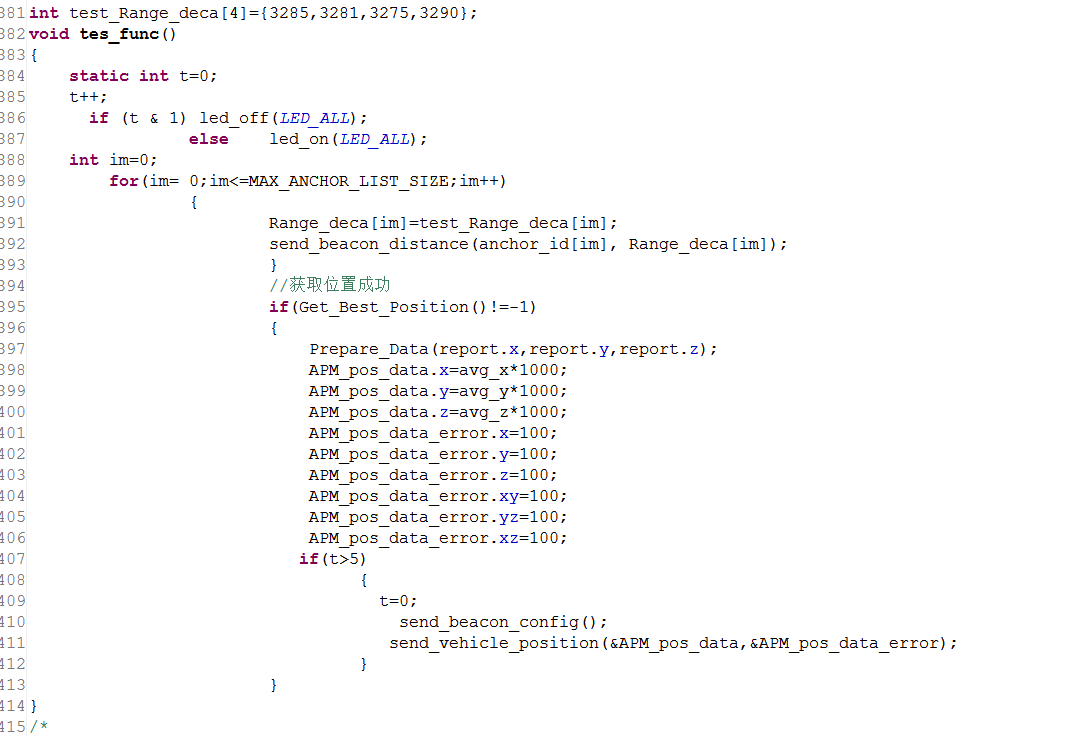
And I have set the parameters of board right,But the copter still can’t get the position fixed. What can I do to get it fixed?
