I am using the IR-LOCK along with a Lidar (LW20B) on my quad for Precision Loiter & Landing.
When I use the rc to change the state to Precision Loiter, there is no indication on the user interface (Mission Planner in my case) that the copter has actually changed its state to PL. I can see the behavior of the copter and guess that it indeed changed, but it is not enough: There can be a case where the copter did change mode to PL but the sensor doesnt detect the beacon.
When I change to Land - the copter will do a Precision Landing anywaty. However, there is no way to tell in real time whether the sensor has detected the beacon or not.
My questions:
a. Is it possible to get an indication whether the copter change mode to Precision Loiter?
b. In Land - it is possible to tell in real time (not to extract from the log file) that the sensor has detected the beacon?
Is there any other way to tell the copter is in Precision Loiter mode w/o looking at the Mavlink inspector or the copter’s response? Typically, when you assign flight modes and flip switches on the controller back and forth, the current flight mode is displayed in the top info bar, and is highlighted yellow in the Flight Modes menu in QGC. Would the assignment of the auxiliary channel to Precision Loiter do the same, or is there no indication other than Mavlink and physical response?
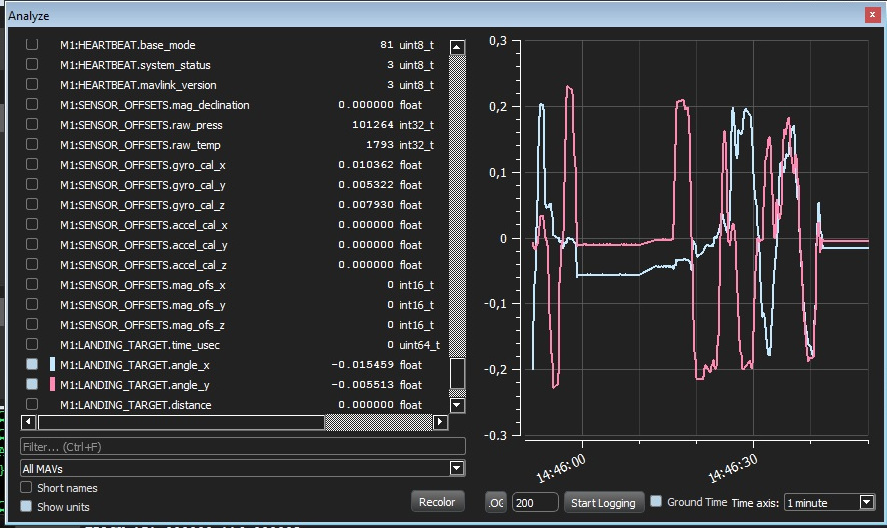
Do the sensor_offset messages only come to the GCS for companion precision landing implementations? I didn’t see it in the IR-LOCK backend. Are there any other status messages associated with the precision loiter or landing that could be monitored on the GCS side? For instance, is there a status for target acquired or that precision loiter is activated. Right now, I have to review the log files to determine why it didn’t work.
Also, why is precision loiter not in the enum of flight modes?
I only worked with Companion Computers and we used to check the mavlink signal on the GCS using mavlink inspector. I dont remember if there was announciator output avail for status.
Hi, im using copter 4.0.5 and mission planner 1.3.74, in which i dont see any indication as well.
Do you know how you are getting TARGET_LANDING massages?
Do you use arducopter as well?
Does the QGC ask for something MP doesn’t?
Hi, can you elaborate on the job?
Did you make any changes in the AC code?
Do you know if I can ask for TARGET_LANDING messages from the autopilot via companion computer?
Sure
Need to do some custom work with these AC and MP versions
I am curious how he got these messages through QGC
For the record i do get indication in the BIN log on PL.Tacc but need to get real time indication.
Its is Mavlink Inspector that you can invoke in both Mission Planner and QGC
Wiki is your friend
and Please follow @LupusTheCanine advise and start a new thread with detailled information if you require more explanation on a particular issue.